无人驾驶城轨车辆控制系统分层递阶架构设计
2015-12-23孟建军陈晓强韦腾舟
孟建军,陈晓强,耿 言,韦腾舟
(1.兰州交通大学 机电工程学院,甘肃 兰州730070;2.南车南京浦镇车辆有限公司,江苏 南京210031)
0 引 言
传统城轨车辆在运行中的安全性和舒适性是靠车辆固有的零部件的物理特性来调节的,例如,空气弹簧降低车辆的垂向振动,抗侧滚扭杆降低车辆侧滚的风险等;且车辆在运行中,主要通过轨道电路传递车辆信息,这种行车组织方式和车辆构造已经不能满足日益复杂的客流和运行环境,车辆的舒适度和安全性也会随着客流的快速变化而下降。
与传统的有人驾驶相比较,无人驾驶城轨车辆在全程行驶过程中无人看守,车辆的各系统在运行过程中进行实时监控,包括牵引系统、通信系统、转向架等。这种高度的自动化和先进性,使无人驾驶城轨车辆能够解决传统城轨车辆具有的上述缺点。面对无人驾驶城轨车辆控制系统具有的各类感知设备和控制器,以及分散分布在车辆、轨道甚至车站的各种不同类型、不同功能、不同接口的各种设备,首先需要研究的问题是合理选择一个有效的控制理论。本文以分层递阶控制理论为依据,提出了一种无人驾驶城轨车辆控制系统的分层递阶架构设计,并对无人驾驶城轨车辆在运行过程中的控制和协调问题做了相关分析。
1 分层递阶控制理论
分层递阶控制理论作为组织和分析复杂系统的一种常用方法[1],其控制系统的控制结构形式,由组织级、协调级、执行级组成,如图1所示[2]。系统中的各个子系统可以按照一定的优先级和从属关系来分配决策单元进而达到控制目的,同一级别的决策单元可实现相互间的平行工作,并作用于下级子系统,同时也受到上级系统的干预,各子系统间可通过上级互相交换信息。
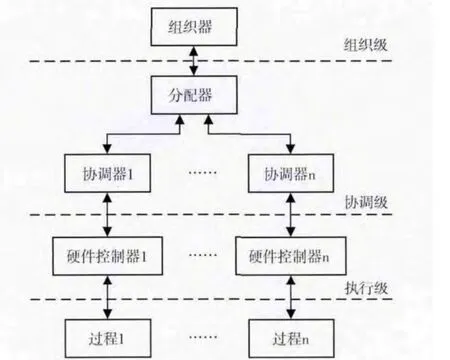
图1 分层递阶控制系统结构
组织级是分层递阶控制结构的最上层,应用人工智能的主导思想进行综合智能决策,并针对给定的任务和命令,给出合理适当的控制模式对协调层下达控制命令。
协调级是分层递阶控制结构的中间层,由一定数量的协调器组成,协调器根据来自各方不同的命令推导出一系列的合理优化执行指令,并将这些指令分解成可供执行层操作的具体动作序列。
执行级是分层递阶控制结构的最底层,由经典控制理论和现代控制理论起主导作用,一般由多个控制器组成,执行一个确定的动作[3,4]。
2 无人驾驶城轨车辆控制系统的分层递阶架构设计
如果城轨车辆无人驾驶控制系统从总体结构到车辆、轨道、车站监控系统均采用分层递阶控制结构,那么就需考虑:①各分层控制系统功能的划分与分配,以及各分层控制系统间的组织协调;②如何确定各分层控制系统的信息传递路径,使其能够满足系统整体高效、可靠的控制需要。
通过研究分层递阶控制理论,利用其多级结构控制的思想,可按照控制范围将无人驾驶城轨车辆系统分为:设备级、车站级和中央级,三级监控系统。按照控制功能又可以分为:上位监控层、协调层、控制层和过程层。其具体的结构如图2所示。
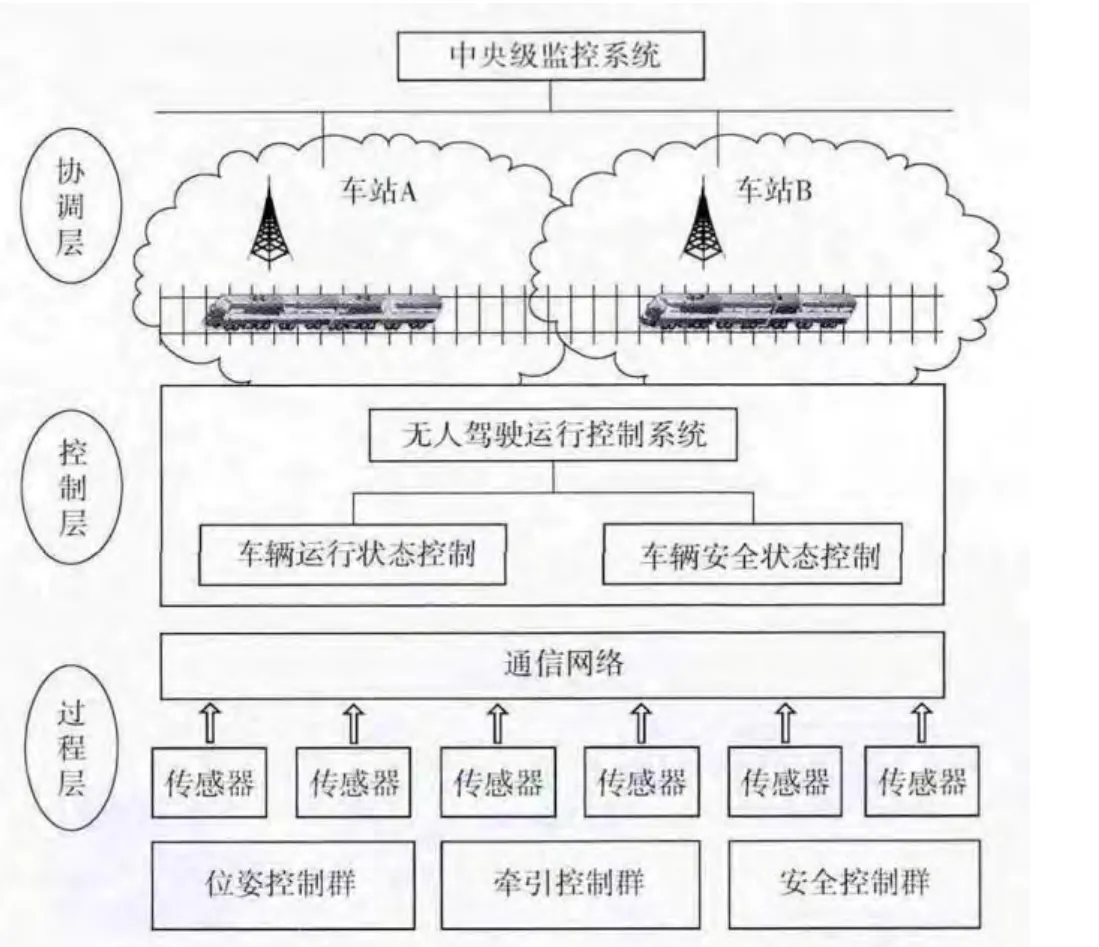
图2 无人驾驶城轨车辆的分层递阶控制结构
3 分层递阶控制结构的实现
3.1 过程层的实现
过程层即分层递阶结构中的执行级。在无人驾驶城轨车辆控制系统的分层递阶结构中,监测车辆运行状态的传感器系统、车辆安全状态监测系统 (包括车辆内部安全状态监测和轨道状态安全监测)和车站安全状态监测系统均属于递阶控制结构中的过程层。这些设备 (除无人驾驶控制系统外)是基于列车牵引控制、列车鲁棒控制、列车协同控制等多种控制的需求而设立的,为列车稳定、舒适、安全的运行提供最原始的控制参数,如图3所示。
3.2 控制层的实现
在车辆内部,车辆运行状态控制器和车辆安全状态控制器属于控制层,图4所示控制层的结构。为过程层中监测车辆运行状态的各传感器将列车运行参数实时传输给车辆运行状态控制器,该控制器根据车辆运动数学模型,综合接收到的参数,做出判断,控制车辆的平稳运行,并将控制指令反馈到无人驾驶运行控制系统;车辆安全状态监测系统主要由车辆内部安全状态监测系统和轨道安全状态监测系统两部分组成,该监测系统将监测到的情况实时传输给车辆安全状态控制器,该控制器的指令具有优先权,根据车辆面临的安全级别,做出相应反应,并将判断结果传递给无人驾驶控制系统执行,如列车内部发生火灾,轨道断裂或严重不平顺时,车辆安全状态控制器发出减速或紧急制动的指令,无人驾驶控制系统优先执行此指令,立即控制列车减速或制动。由于车辆运行状态控制器、车辆安全状态控制器都是安装在车辆内部,考虑到车辆运行的外部环境比较复杂,因此它们之间采用现场总线的连接方式是比较合适的,同样,过程层的传感器系统、车辆安全状态检测系统也用现场总线与控制层的控制器连接。
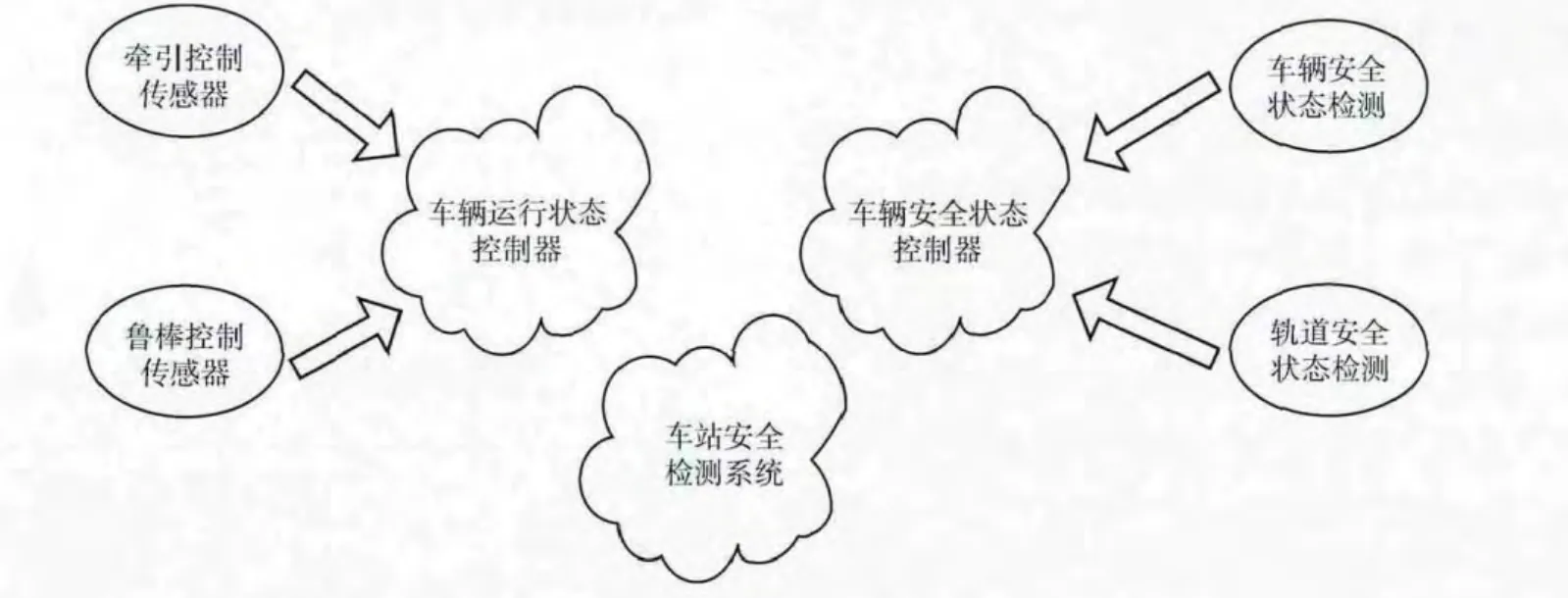
图3 过程层的结构

图4 控制层的结构
3.3 协调层的实现
车辆运行状态和车辆安全状态是一个需要协调的整体,两者具有很强的关联性,因此,在车辆内部需要一个上位监控系统来统一协调两者。此外,在车辆进站和出站的一段距离内,以及在车站停止运行的时间内,车站的安全状态对车辆的运行也有重要的影响,所以此时,车站安全监测系统也需要加入上位监控系统的协调工作中。车站安全状态监测系统分布在车站各处,宜使用无线传输方式与车辆内部的上位监控连接。
在多列无人驾驶城轨车辆协同控制运行中,由于没有了传统的闭塞区间,因此前后两列车必须要保证信息交换的畅通。前后车辆之间根据各自的运行状态和道路安全情况,由相应的多列车协同控制方法,做出适当的调整。为了保证信息传输的畅通和安全,也由于无线传输的距离限制,可以以车站的管控范围为界,运行到某车站管控范围内的车辆只向该车站的监控系统报告自己的状态,车站的监控系统也只向自己管控范围内的车辆发出控制信息,如图5所示。
由于无线通信网络的固有特点,相邻两个车站的管控范围必然有覆盖重叠,在这个重叠区域内,为了确保信息传输的可靠性,车辆应当将信息同时传输给这两个车站。
3.4 中央监控层的实现

图5 车站管控范围与信号强度
城轨车辆行驶过程中,车辆、车站及轨道交通系统内的所有设备应成为能够相互配合与协调的有机整体,并在一定的运营模式下工作,保证城轨车辆的运行可以根据不同时间、季节和模式进行相应调整,从而实现城轨车辆高效、准确运行的目的。因此,有必要将各个车站通过光纤通信连接成网,建立一个中央级监控系统采集全线所有车站设备和车辆的运行信息作为上位监控系统,这个上位监控系统是整个网络系统的神经中枢和最高指挥中心,负责各车站之间的协调工作[5,6]。
4 与现有结构方案的比较
无人驾驶城轨车辆最突出的特征是操纵交通控制系统的行车指令信息完全通过信号系统发送,与有人驾驶城轨车辆相比,其优势主要体现在行车单位安全性能和可靠性能高,列车可以高密度的运行,降低了生命周期成本和工程投资。
现有的轨道车辆运行控制方式主要是依靠轨道电路识别、定位车辆运行信息,控制中心的控制指令通过信号灯传递。城轨车辆实现无人驾驶后,其控制系统的结构相比较于现有结构,有如下优点:
(1)不再需要在轨道旁设置信号灯,控制中心的主要作用转变为监督和协调职能;
(2)车辆的绝对坐标信息不再是监控重点,信息交流的主要内容为车辆间的相对距离以及各自的速度,这样有利于最大限度的增加行车密度,减少到站的延误时间;
(3)车辆的运行不再是简单的提速和降速的问题,车辆运行姿态的调整、运行环境的安全程度都纳入到车辆运行过程中,增加了车辆运行的安全性和舒适性;
(4)信息传输的路径由车辆-轨道电路-控制中心-信号机-车辆改变为车辆-车辆或者车辆-中央监控系统-车辆,信息传递的路径大大简化,也就提高了信息传输的效率,符合可靠性设计要求;同时,信息传递的内容也更加丰富[7]。
5 算例分析
在物联网条件下无人驾驶城轨车辆协同控制递阶结构模型中,协调层中列车间的协调控制是通过信息实时采集与等间隔多列车协同调整控制来实现的,其核心思想是通过执行一种控制策略,使列车在区间运行时,通过不断地对列车调整控制,使列车保持一定的距离间隔,并使其速度在给定的范围内变化,将增加运输密度,提高线路的运输能力,提高瓶颈区段的通过能力。
对于给定的列车运行间隔距离,是在保证每一辆列车在安全跟踪运行的前提下,当前一辆列车离开车站后,下一辆列车能够及时进入车站,而不是过早的到达在站外等待或延时进站,从而减少乘客平均等待时间和列车延误时间。其中安全跟踪距离是指当前一辆列车紧急停车时,后车能否保证以正常的减速度安全停车,而不发生危险[8]。
为了保证运行的效率,不能只为保证列车等间隔运行而使得列车的运行速度太低。其速度范围的设定是根据线路限速、车辆限度等条件,结合列车牵引控制策略规定的最优运行速度区间决定。
5.1 条件假设
(1)列车进行长距离行驶,轨道曲率变化不大;
(2)将每列车看成可以相互通信的智能体;
(3)列车每个站的停车时间在合理的范围内;
(4)各列车的长度一定,可以看成一个运动的质点;
(5)单线,列车在区间无法越行;
(6)列车行进过程中,每隔一段时间对列车的行进距离进行信息采集,时间间隔为Δt;
(7)假定通过信息的采集可以得知车辆之间的间隔距离以及车辆距离下一停车站点的距离,和各列车的当前速度;
(8)控制模型可以控制所有正在运行的列车,并在每次完成列车信息采集后实时生成控制指令。
先给出实时信息采集等间隔调整模型中使用的变量,见表1[9]。
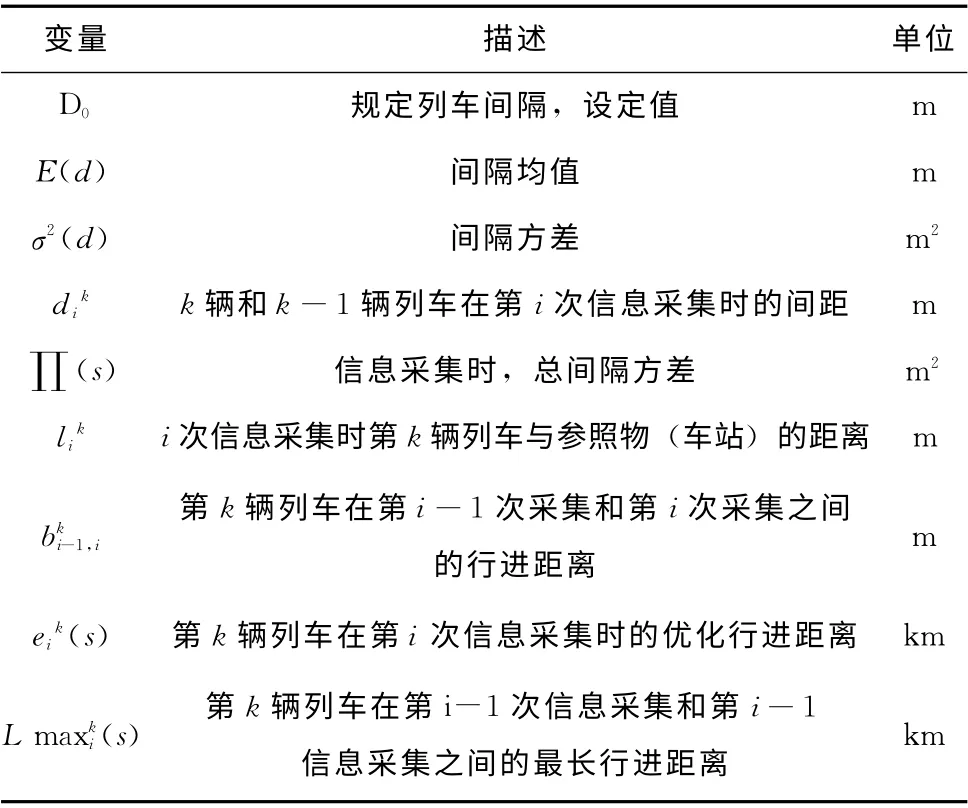
表1 实时信息采集等间隔调整模型变量
5.2 模型的描述
其目的是如何根据当前的车速及列车之间的距离,及时的调整,达到预期给定的距离和车速,为确保列车流的等间隔移动,需要检测、预判并调控规定信息采集时刻上的列车行进距离。列车与参照物 (车站)的距离lik与列车在i-1,i两次信息采集间的行进距离的关系为

第i次信息采集时,第k-1辆和第k辆列车的距离间隔关系为

于是可得

当有N 辆车在系统中时,第i次信息采集时的均值E(d)可表示为

方差∏(s)可以表示为

车辆在第i次信息采集时的行进距离,其最终要实现的列车区间等间隔运行结构如图6所示[10]。
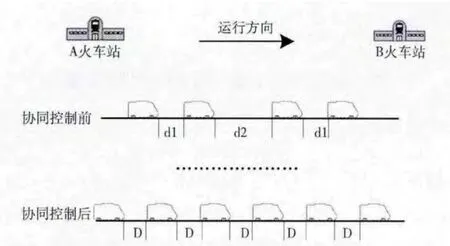
图6 列车区间运行结构
6 结束语
本文设计了一种基于分层递阶结构的无人驾驶城轨车辆控制系统的架构。该架构考虑了无人驾驶城轨车辆控制系统的相关设备,按照其功能将之分类,确立了组织关系和信息传递路线,并以协调层为例,对城轨车辆的协同控制从算法上进行了分析和说明。目前,国内无人驾驶城轨车辆的理论研究还不成熟,应用尚处于起步阶段,本文在后续工作中,还需要重点对无人驾驶城轨车辆控制系统的关键技术进行研究。
[1]LIU Meng,CHU Xiaodong,ZHANG Wen,et al.Design of cloud computing architecture for distributed load control[J].Power System Technology,2012 (8):140-144 (in Chinese).[刘萌,褚晓东,张文,等.负荷分布式控制的云计算平台构架设计 [J].电网技术,2012 (8):140-144.]
[2]YU Kun.Study on self-healing control of the urban power grid based on hierarehical control theory [D].Hangzhou:Zhejiang University,2011 (in Chinese).[余昆.基于分层递阶控制理论的城市电网自愈控制研究 [D].杭州:浙江大学,2011.]
[3]WANG Chengcheng,WANG Jia,YIN Xiaohong.Hierarchical control theory and establishing subway BAS [J].Urban Rapid Rail Transit,2009 (5):28-31 (in Chinese).[王程程, 王佳,尹晓宏.分层递阶控制理论与地铁环控系统构建 [J].都市快轨交通,2009 (5):28-31.]
[4]FENG Jinbing.Hierarchical control theory and power system automation research [J].Electronics World,2012,34 (22):62-63 (in Chinese).[冯进兵.分层递阶控制理论与电力系统自动化研究 [J].电子世界,2012,34 (22):62-63.]
[5]DAI Ning.Research of hierachical intelligent control-based unmanned helicopter control system [J].Aeronautical Science &Technology,2010 (2):37-40 (in Chinese). [戴宁.基于智能分层递阶控制的无人直升机控制系统方案研究 [J].航空科学技术,2010 (2):37-40.]
[6]YU Kun,CHEN Xingying,CAO Yijia.Hierarchical architecture for self-healing control of urban power network [J].Power System Technology,2012,36 (10):165-171 (in Chinese).[余昆,陈星莺,曹一家.城市电网自愈控制的分层递阶体系结构 [J].电网技术2012,36 (10):165-171.]
[7]DENG Jialong,ZHOU Jianle.Research and development of the control system for driverless urban rail trains[J].Railway Vehicles,2007,45 (9):22-25 (in Chinese). [邓家龙,周建乐.无人驾驶城轨列车控制系统的研究与开发 [J].铁道车辆,2007,45 (9):22-25.]
[8]LUO Qiang,XU Lunhui.Car-following model based on the minimum safety distance and simulation study [J].Science Technology and Engineering,2010,10 (2):569-573 (in Chinese).[罗强,许伦辉.基于最小安全距离的跟驰模型的建立和仿真研究[J]. 科学技术与工程,2010,10 (2):569-573.]
[9]XUN Jing.Research on coordinated train control by using agent and cellular automata[D].Beijing:Beijing Jiaotong University,2013 (in Chinese).[荀径.基于智能体和元胞自动机的列车协同控制研究 [D].北京:北京交通大学,2013.]
[10]Huang Z,Kang M,Gao K,et al.A research for train station to station running under moving autoblock system using cooperative control[C]//32nd Chinese Control Conference.IEEE,2013:7279-7284.