基于数学形态学的集装箱箱号快速定位算法
2015-12-23贺俊吉
王 炎,贺俊吉
(上海海事大学 物流工程学院,上海201306)
0 引 言
集装箱箱号定位主要采用以下方法:基于边缘检测和形态学的方法[1-4],这类方法适应性较强,能有效去除噪声,但文献 [1]中用连通区域填充度筛选箱号区域的方法以及文献 [2,3]中直接根据连通区域宽高比筛选的方法在复杂背景中效果不佳,而文献 [4]中去除干扰边缘的方法较复杂,运算量大;基于箱号区域位置和投影的方法[5],该方法在箱号区域处于图像中固定位置时,定位效果较好,但对拍摄的图像要求较高,同时需要较多的箱号先验知识;基于边缘点数量统计的方法[6],该方法在干扰字符较少时定位准确,但应用于复杂背景及对比度较低的图像时,容易导致定位误差较大。因此,在复杂背景的集装箱图像中有效去除干扰,快速定位箱号区域十分必要。
1 算法设计
为了快速、正确地定位出集装箱箱号。本文在分析了箱号区域特性的基础上,使用少量先验知识对运用形态学后的二值图像,通过连通区域匹配度和面积筛选箱号区域。同时,因为形态学运算的优点之一是能将基本的逻辑运算与移位运算相结合,使许多原本对二值图像十分繁杂的运算变的简单。因此本文算法选择在二值化后图像上进行。这样做不仅使算法运算时间变短、提高了实时处理的能力,而且算法不复杂、更加有利于集装箱箱号区域的定位[7]。本文中各部分模块组成的流程如图1所示。
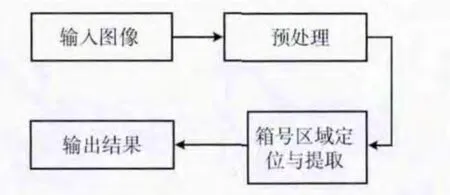
图1 各模块组成的框架
2 图像预处理
在图像预处理模块中包括4个步骤:灰度变换、滤波、背景消除和二值化。预处理模块如图2所示。
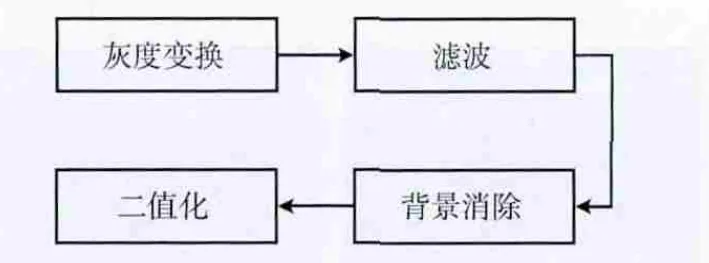
图2 预处理模块框架
(1)对图像进行灰度变换。灰度变换的原因是由于集装箱图像的采集是通过数码相机得到的。在预处理之前的图像全是彩色图像,而彩色图像包含的信息量很大,这样需要的更大的存储空间,因此图像处理的速度也会随之变慢。因此对图像进行灰度变换可以使图像只包含亮度信息,不包含彩色信息。灰度变换的目的是为了提高图像的处理速度,使图像在处理中更加方便计算。
(2)对图像进行维纳滤波。对图像滤波的原因是,在对集装箱图像进行处理的时候,会遇到噪声带来的影响。噪声对图像的信息是一种损害。所以对采集到的集装箱图像进行滤波十分必要。维纳滤波器在假设噪声是高斯以及加性的,而且信号与噪声相互独立的基础上得到最小均方误差意义下的最优滤波[8]。维纳滤波的目的是为了将细小的噪声去除。
(3)对滤波后的图像进行背景消除。这样处理的原因是由于拍摄的图像常会有光照不均的情况,加之集装箱箱体受到沙尘污染,涂刷在上面的字符也会受到影响,从而降低了对比度。由于本文拍摄的集装箱图像中相机与集装箱的距离为3至4m,因此本文中集装箱背景消除的方法为:①选择大小为6×6的正方形结构元素对图像进行开运算得到背景图;②用原图像减去背景图即得到背景消除后图像。
(4)对消除背景后的图像进行二值化。本文使用Otsu法对图像进行二值化。这样处理的原因是因为天气、拍摄时的角度和箱体上的油污等因素会对采集的集装箱图像造成影响,导致采集到的很多集装箱图像的质量比较低。有的图像中会存在严重的光照不均、对比度较低和不明显的字符边缘。Otsu法相较于传统方法更能满足本文对二值图像的要求。
3 箱号区域定位与提取
集装箱箱号区域的定位与提取是集装箱箱号自动识别系统的一个重要的环节,箱号定位提取的准确与否直接影响着后续的自动识别工作。定位提取模块如图3所示。
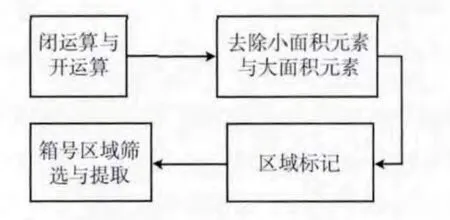
图3 箱号区域定位与提取模块框架
3.1 排除图像中的干扰区域
本文运用形态学方法对二值化后的图像进行处理。目的是为了生成较大的连通区域。这样做可以更好地去除干扰区域,从而为后面筛选出真正的集装箱箱号区域打下良好基础。
在数字图像处理中,形态学是借助集合论的语言来描述的。通常将用于处理某幅图像且较小的图像成为结构元素。二值图像中的基本形态学运算包括4种,分别为腐蚀运算、膨胀运算,以及由前面两者相结合而产生的开、闭运算。形态学中直接影响处理结果的因素有两个:结构元素的选择和形态学运算的选择。本文的具体算法为:
(1)在选择结构元素时,选择符合集装箱箱号区域宽高比的矩形结构元素。目的是为了正确地使箱号区域中的字符形成连通区域;
(2)用步骤 (1)中的结构元素对图像进行闭运算,目的是为了弥合字符间狭窄的间断并且填充例如数字6、9以及字母A、B等中的孔洞;
(3)用比步骤 (1)中小的结构元素对图像进行开运算。目的是为了使图像的轮廓变得光滑,同时还能消除毛刺;
(4)通过设定阈值将连通区域面积远小于或是远大于拍摄图像中可能的箱号区域面积去掉。这样处理的原因是由于集装箱图像背景复杂,在图像中形成了许多孤立的较小的连通域与较大的连通域,这些连通域明显不是集装箱箱号区域。目的是为了在筛选箱号连通区域的时候更加方便快速;
(5)对经过步骤 (4)处理后的连通域进行标记。目的是为了更好地将目标区域与背景区分开来。
3.2 集装箱箱号区域的筛选与提取
本文采用基于箱号区域的宽高比和面积特征的方法筛选出箱号区域。分析集装箱箱号区域的特点将有助于在候选区域中筛选出箱号区域。根据国际通行的规则,集装箱号码应喷涂于集装箱的前、后、左、右、上5 个面,箱号末尾还有校验码和箱型代码。在5个面上的号码虽然相同,但字形、排列却可能有区别,分为横向一行、横向两行、竖向一列和竖向两列4种。因此本文的算法如下:
(1)本文借鉴车牌定位的方法,采取如下处理:假设某种排列方式的箱号区域宽高比大约为M:N,则面积和周长的平方存在如下关系

这样处理的原因是考虑到连通域并非规则矩形,因此如果直接根据连通域宽高比进行筛选,正确率不高,加之长度与宽度的统计要难于面积和周长的统计;
(2)以式 (1)为特征,令

式中:metric——箱号区域的匹配度。判断时可将匹配度与1进行比较,如式 (3)所示

式中:ε——匹配度与1之差的绝对值,并将区间 [-ε,ε]作为领域范围。由此可知,ε越小则与之相对应的连通域是长宽比为M:N 的矩形的可能性就越大;
(3)然后根据步骤 (2)中的判断方法,逐个扫描由上一小节得到的标记过的连通域,并且计算每个连通域的周长和面积;
(4)接着按照式 (3)计算出ε的值进行判断,经反复实验,本文中若ε=0.1,即metric的范围在0.9至1.1时,能更加精确地判断出集装箱箱号区域。若ε的值过大,则有可能增加候选区域,反之则可能将箱号区域剔除。因此当匹配度满足式(3)时,将此区域作为箱号区域的候选区域;
(5)如果ε的值大于0.1,则对下个区域进行扫描,即执行步骤 (3)和步骤 (4),直到扫描完图像中的所有连通域为止;
(6)虽然此时箱号候选区可能不止一个,但是考虑到一般情况下箱号区域形成的连通域面积较大,因此对候选区域不是一个的情况,则将面积按大小进行排序,将面积最大者判定为集装箱箱号区域;
(7)最后根据筛选后区域的坐标从预处理后的二值图像中提取箱号区域。首先获得箱号区域所在连通域的外界矩形上每一点的坐标;然后分别求出连通区域在X 轴方向的最大值和最小值,以及在Y 轴方向的最大值和最小值,即连通域外界矩形4个顶点的坐标;最后将坐标映射到二值图像中从而提取集装箱箱号区域。
4 实验与分析
本文所有实验在MATLAB 2011b中进行。并且通过对背景不相同的集装箱图像进行实验,进一步证明了算法的实用性与可靠性。其中一次实验的完整过程及其结果如图4与图5所示。
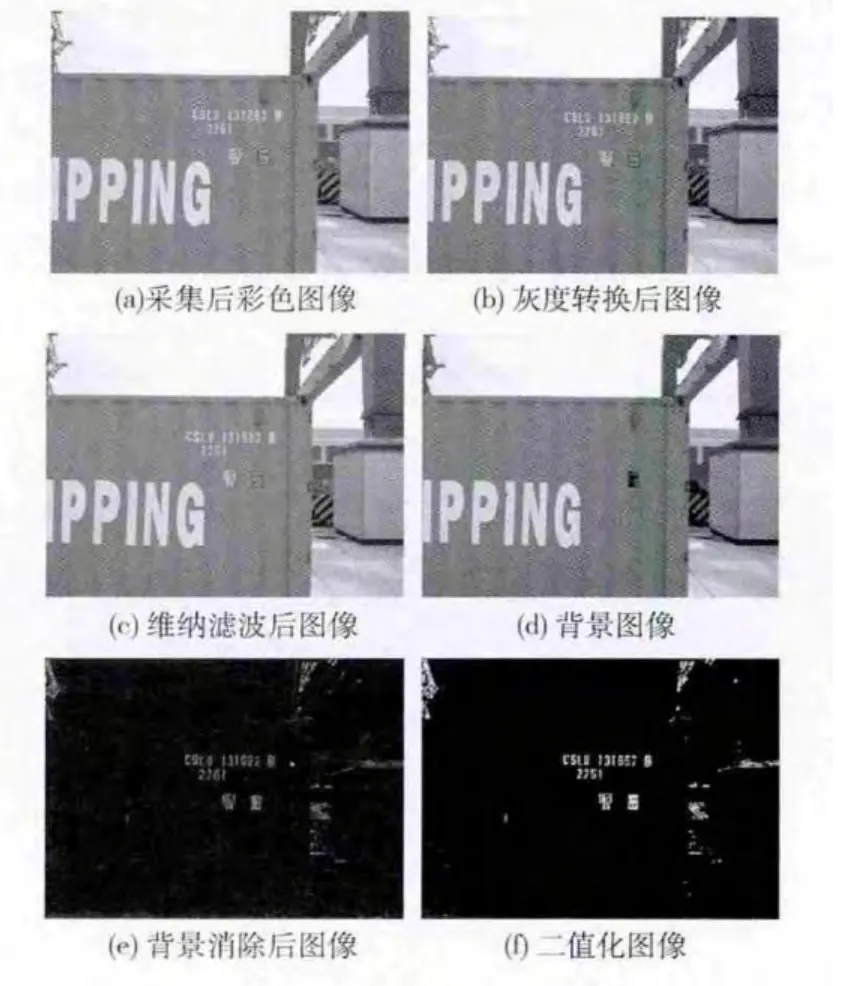
图4 集装箱箱号预处理过程
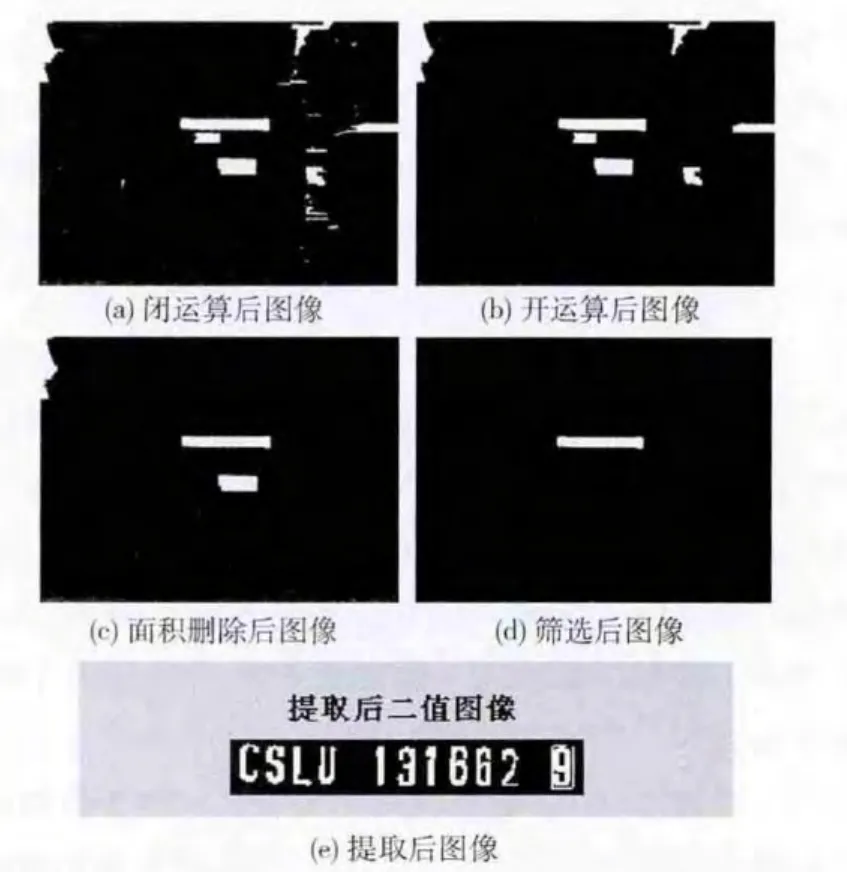
图5 集装箱箱号定位过程
图4 (a)为原始集装箱图像;图4 (b)为灰度转换后的集装箱图像;图4 (c)为维纳滤波后的图像;图4 (d)为集装箱图像中的背景图像;图4 (e)为背景消除后图像;图4 (f)为二值化后图像。
图5 (a)和图5 (b)为闭运算与开运算处理后的图像;图5 (c)为标记连通域、删除较小连通域和较大连通域后的图像;图5 (d)为集装箱箱号区域筛选后的图像;图5 (e)为定位提取后的箱号区域图像。
在图5 (a)和图5 (b)中本文选择了大小分别为5×45的矩形结构和5×5的正方形结构元素对二值化后的图像分别进行闭运算和开运算。结构元素大小的选择是根据箱号排列方式的规律 (本文中箱号的排列方式为横向一行排列,此时,箱号区域的宽高比为8—10)以及拍摄图像的大小结合实验统计得到的。从两幅图中可以看出形态学运算在保留连通域形状特征的同时,也将图像中不同的部分重新生成了新的连通域。在对图像进行开运算后,图像中的连通域仅剩下了区域特征,同时去除了毛刺。虽然图像中箱号区域的形状特征经处理后有小的畸变,但整体形状特征得到了较好的保留。
在图像5 (c)中的连通域个数由图5 (b)中的7个减少到了3个。实验中经过统计发现箱号区域的面积大约在3000至4000pixel。因此本文中将面积小于1500pixel的连通域以及大于6000的连通域剔除。这样处理的目的在于减少来自背景的干扰,同时很大程度上减少了后面筛选区域时的运算量,提高了运算速度。
对于横向一行排列的集装箱箱号。经实验,M∶N 的值取8.5∶1时效果最好。图5 (d)为经过匹配度和面积筛选后图像。
由图5 (e)中可以看出本文算法正确地筛选出了被标记的集装箱箱号区域。实现了集装箱箱号的定位与提取。
在不同背景下另外两幅集装箱图像的定位实验结果如图6所示。
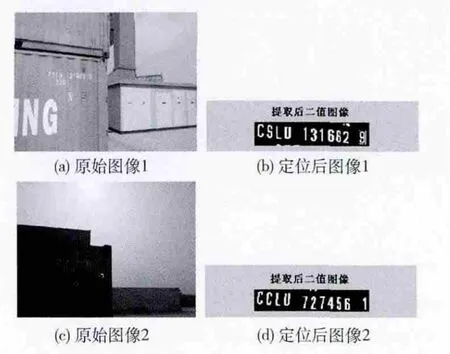
图6 原始集装箱图像与定位结果
从图6也可以看出,在不同背景下集装箱箱号区域提取完整、无残损。即使在对比度较低的时候,本文的算法也能正确定位出集装箱箱号区域,为后续的倾斜校正与字符分割打下了良好的基础,满足集装箱箱号快速、正确的定位要求。
本文实验中采集了具有代表性的集装箱图像共计128幅。图像尺寸为530×706pixel,除了理想拍摄条件下的图像外,也包含了在非理想拍摄条件下的图像,如阴天、光照不均、箱体表面有油污、字符缺损、对比度较低、箱号区域在图像中位置发生变化等,如图7所示。
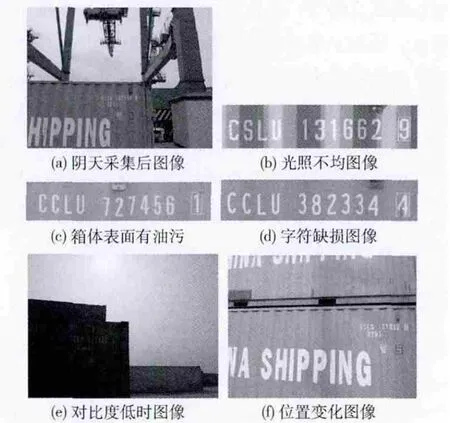
图7 各种拍摄条件下的集装箱箱号图像
本文算法在经过维纳滤波和背景消除等预处理步骤后,使得复杂背景下的箱号被更好得和背景区分开,有效并且快速地排除了非箱号区域的干扰。同时本文对例如字符间距、大小等集装箱箱号的先验知识依赖相对较少。并且对复杂背景下拍摄的集装箱图像有一定的自适应能力。本文算法和文献 [1]算法的定位结果见表1。

表1 定位结果
由表1可以看出,本文算法的定位率和文献 [1]相比更高。原因之一是本文在预处理模块中添加了背景消除步骤,增强了程序对对比度较低和光照不均的集装箱图像的处理能力;原因之二是在定位与提取模块中,通过去除较小面积和较大面积,从而有效的减少了箱号候选区域的数量。并且在对候选区域筛选时,利用匹配度和箱号区域面积两种箱号区域特征进行筛选,和文献 [1]中仅仅依靠连通区域占有度的方法相比,定位结果更加准确。
从表1中可以看出,虽然本文算法的定位率较高,但仍存在一定的错误。定位错误的原因是在拍摄时,集装箱箱面与摄像头不平行程度非常严重,导致拍摄的图像产生严重畸变。从而使集装箱箱号区域的匹配度与1的差值不在领域范围内,导致定位错误。
5 结束语
对集装箱箱号的定位进行了应用性的研究,提出了一种快速集装箱箱号定位算法。通过本文的研究结果发现,对预处理后的图像采用形态学方法处理并进行筛选后能快速、有效地定位集装箱箱号。完善了目前集装箱箱号系统中定位部分的方法。适用于堆场和码头等背景较复杂以及对比度较低的场合。实验结果表明,本文方法简单实用、同时运算速度快有利于实时处理,可用于集装箱箱号自动识别系统。在分析了文献 [1]至文献 [6]中定位方法的基础上,将文献[1]中的定位结果和本文结果进行了比较。本文中的算法对于对比度非常低以及拍摄距离变化很大的集装箱图像容易导致定位错误,这是后续研究中需要解决的问题。
[1]WANG Yongliang.Research and implementation of container number identification based on video [D].Dalian:Dalian Maritime University,2010 (in Chinese).[王永亮.基于视频的集装箱号码识别方法的研究与实现 [D].大连:大连海事大学,2010.]
[2]HU Ting.A Research of container character recognition based on neural network [D].Wuhan:Wuhan University of Technology,2012 (in Chinese).[胡婷.基于神经网络的集装箱字符识别的研究 [D].武汉:武汉理工大学,2012.]
[3]SUN Linghong.Study of container number smart recognition algorithm [D].Wuhan:Wuhan University of Technology,2012 (in Chinese).[孙凌红.集装箱箱号智能识别算法研究[D].武汉:武汉理工大学,2012.]
[4]TAN Wei,FANG Chao,DU Jianhong.Improved container code segmentation algorithm based on mathematical morphology[J].Computer Engineering and Applications,2011,47 (13):174-177 (in Chinese).[谭伟,方超,杜建洪.基于数学形态学的集装箱箱号分割改进算法 [J].计算机工程与应用,2011,47 (13):174-177.]
[5]TANG Xiaodong.Studies on container’s box number recognition based on BP neural network [D].Wuhan:Wuhan University of Technology,2007 (in Chinese).[唐晓东.基于BP神经网络的集装箱箱号识别研究[D].武汉:武汉理工大学,2007.]
[6]ZHANG Min,WANG Xihuai,XIAO Jianmei.A new method of the container codes’localization and character segmentation[C]//Chinese Control and Decision Conference.IEEE,2009(in Chinese).[张敏,王锡淮,肖健梅.一种集装箱箱号定位及字符切割技术 [C]//中国控制与决策会议.IEEE,2009.]
[7]YANG Shubin,ZHANG Yang.Fast morphological locating algorithm of vehicle license plate in complex vehicle images[J].Computer Technology and Development,2008,18 (6):50-53 (in Chinese).[杨述斌,张阳.复杂车辆图像中的车牌快速形态定位算法[J].计算机技术与发展,2008,18 (6):50-53.]
[8]GUO Shuixia.Extension of wiener filtering when noise could be non-additive in image processing [J].Computer Engineering and Applications,2007,43 (12):184-185 (in Chinese).[郭水霞.图像处理中非加性噪声情形下维纳滤波的推广 [J].计算机工程与应用,2007,43 (12):184-185.]
[9]XU Qinyan.License plate location in complex background based on texture and color[D].Shanghai:Donghua University,2013 (in Chinese). [徐勤燕.复杂背景中基于纹理和颜色的车牌定位研究 [D].上海:东华大学,2013.]
[10]SHI Linlin.The research of license plate location for license plate recognition [D].Shanghai:Donghua University,2012(in Chinese). [史琳琳.车牌识别中车牌定位技术的研究[D].上海:东华大学,2012.]
[11]Wang Wei,Xie Mei.A novel location method of characters in container codes[C]//2nd International Conference on Education Technology and Computer,2010:383-385