基于模糊PID控制的逆变器研究
2015-12-23杨帆
杨 帆
(安徽理工大学电气与信息工程学院,安徽 淮南 232001)
0 引言
传统的PID 控制器在使用时只需设定比例、积分、微分三个参数即可,使用方便,计算量小且鲁棒性较好,因此在工业控制过程中有着广泛的应用。但由于逆变器控制等场合难以建立准确的数学模型,PID 参数整定也就成了一个复杂的问题,依靠专家经验和人工试凑的方法不仅不够准确,而且比较耗时[1]。
本文引入模糊PID 控制策略,将模糊自适应控制与数字PID 控制相结合,通过模糊控制规则实现参数在线自整定。Matlab 仿真实验结果表明,该控制方法稳态输出精度较高,提高了逆变系统输出的正弦波质量。
1 模糊自适应PID 控制器的设计
1.1 控制器结构
控制器结构如图1 所示,以逆变器系统作为被控对象,将其滤波输出的正弦交流电压信号和输入参考正弦电压信号的误差E 和误差变化率Ec 作为输入,在运行过程中不断检测,并进行模糊化处理。根据PID 参数整定原则制定模糊规则表,通过查表和模糊运算输出修正参数△Kp,△Ki 和△Kd,在传统PID 参数的初值基础上增加修正参数即可实现参数自整定。整定后的PID 参数Kp、Ki、Kd 由式(1)所示,其中Kp*、Ki*、Kd* 为预整定值,tp,ti,td 为修正系数。[2]


图1 控制器结构图
1.2 控制算法设计
模糊控制器的输入变量为E 和Ec,输出变量分别为和△Kp、△Ki和△Kd,各变量语言值为:{负大,负中,负小,零,正小,正中,正大},记为[NB,NM,NS,ZE,PS,PM,PB],选用灵敏度灵较强的三角函数作为隶属函数,模糊控制器中各变量的基本论域取值为:E=[-3 3],Ec=[-3 3],△Kp=[-0.3 0.3],△Ki=[-0.06 0.06],△Kd=[-3 3]。
根据文献中提到的参数整定原则进行参数整定[3],通过模糊推理和实验修正得到模糊控制规则表,如表1 所示。
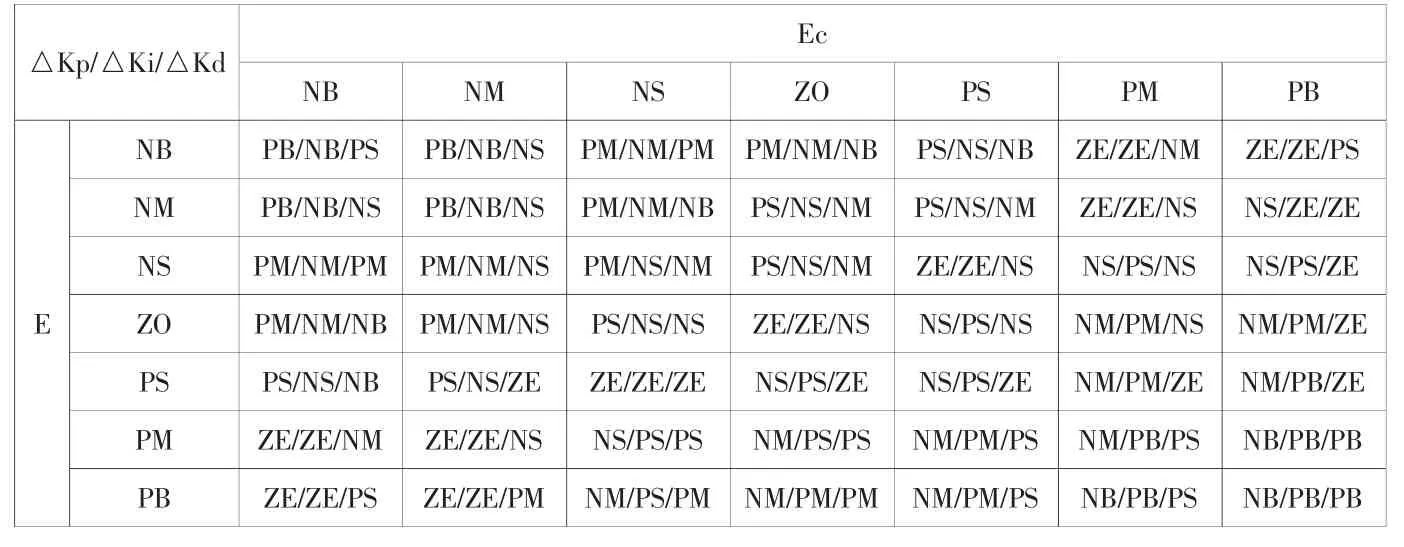
表1 模糊控制规则表
2 逆变器仿真模型设计
搭建如图2 所示的逆变器控制系统仿真模型。其中包括模糊PID子模块,SPWM 波产生模块和逆变器模块。通过Repeating Sequence 模块产生频率为2KHz 的三角波作为基波,Sine Wave 模块产生频率为50Hz 的正弦波作为载波,通过模糊自适应PID 送到SPWM 产生模块,实现SPWM 输出,调制度为0.915,最终逆变输出有效值为220V,频率为50Hz 的正弦交流电压。
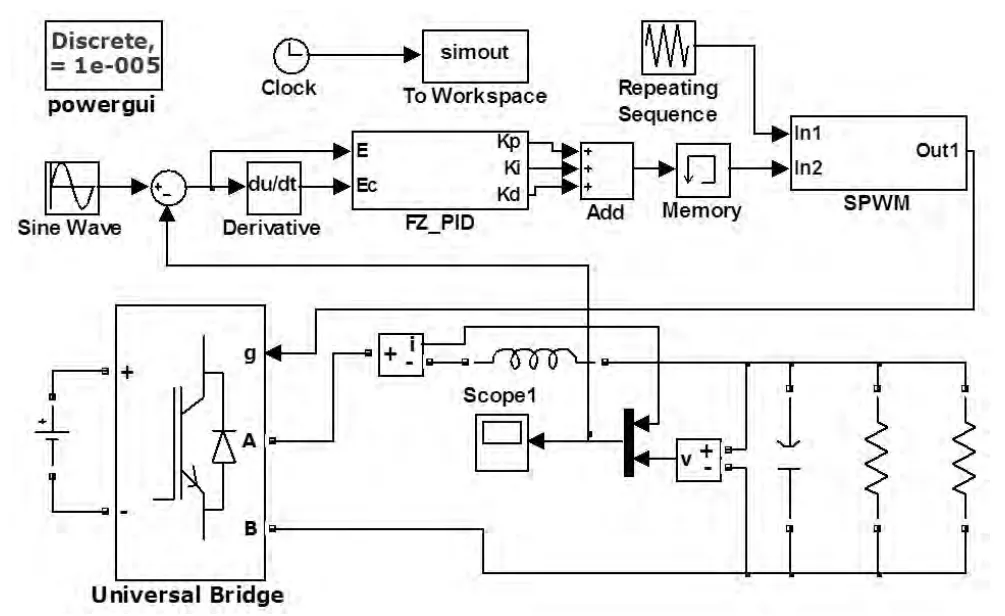
图2 逆变器控制系统仿真模型
其中模糊自适应PID 子模块框图如图3 所示,仿真过程中可以根据参数变化改变Gain3 和Gain7 的值,以达到需要的效果。

图3 模糊PID 子模块框图
3 仿真结果分析
仿真结果如图4 所示,由输出电压和电流可以看出,输出波形比较稳定,能很快接近标准正弦波,输出电压误差在1%以内。阻性负载突变时电压波形基本不变,电流波形非常接近正弦波,验证了模糊自适应PID 在逆变器控制系统中应用的可行性和可靠性。

图4 输出电压和电流
4 结束语
本文提出了一种基于模糊自适应PID 的矿用逆变器控制方法,经过仿真和比较分析,验证了该控制方法的可行性和有效性。当然,由于控制算法相对复杂,运行速度相对较慢,在实际应用中对硬件要求较高,还需要进一步的优化。
[1]何鹏.基于Matlab 的模糊PID 控制器设计与仿真研究[J].微型电脑应用,2010,26(4):59-64.
[2]顾生杰,刘春娟.一种参数自整定模糊PID 控制器的研究[J].电气传动自动化,2003,25(6)-30.
[3]汤秀芬.模糊自适应PID 控制器参数整定的研究[J].工业控制计算机,2012,25(2):55-58.
[4]田淑杭,姜丽娟.一种参数自整定模糊PID 控制器的研究[J].电气传动自动化,2003,25(6):28-30.
[5]刘兴堂.应用自适应控制[M].西安:西北工业大学出版社,2003.5.
[6]吴振顺,姚建均,岳东海.模糊自整定PID 控制器的设计及其应用[J].哈尔滨工业大学学报.2004.36(11):1578-1580.
