无稳定状态颤振的单变量极值搜索算法仿真
2015-12-22胡云安韩庆龙
张 雷,胡云安,韩庆龙
(海军航空工程学院a.研究生管理大队;b.控制工程系;c.基础部,山东烟台264001)
无稳定状态颤振的单变量极值搜索算法仿真
张 雷a,胡云安b,韩庆龙c
(海军航空工程学院a.研究生管理大队;b.控制工程系;c.基础部,山东烟台264001)
针对无稳定状态颤振的单变量极值搜索算法限制条件较为严格的问题,利用平均化方法构造了平均化系统并证明了算法的稳定性,给出了系统参数的选取条件。以微喷十字粱实验系统为例进行应用仿真研究,说明无稳定状态颤振极值搜索算法可减弱系统颤振,改善算法稳定性和准确性。
单变量;极值搜索算法;稳定状态颤振
在系统输出与待搜索变量之间存在最大值或最小值关系时,即可以用某种损失函数来表示,运用极值搜索算法可以在没有准确知道或者不知晓损失函数形式和待搜索变量的情况下,仍能使系统输出取得最大值或最小值[1]。文献[2]首次对一般非线性对象的极值搜索控制稳定性作出了深入地分析。文献[3]在单变量极值搜索算法中加入动态补偿装置,既可以保证算法稳定性,同时也加快了系统的收敛速度,而且消除了自适应增益较小的要求。Ying Tan等人在基于正弦激励信号的单变量极值搜索算法的基础上提出了一种结构简单的极值搜索算法[4],这种极值搜索算法的设计省略了原单变量极值搜索算法设计中高、低通滤波器,仅保留了积分环节和正弦激励信号环节。文献[5]在极值搜索算法结构的基础上,提出了一种通过自适应调节激励信号幅值使系统在局部极值存在的情况下仍能收敛到全局极值的方法,并证明了算法在全局极值点处是半全局渐近稳定的。文献[6]在半全局极值搜索算法结构的基础上加入了高通滤波器,改善了算法的准确性和快速性。文献[7]以微喷十字粱实验系统为例,采用极值搜索算法,加入动态补偿器,并利用RBF神经网络逼近激励信号的最优幅值以改善系统性能,设计控制器进行仿真研究。文献[8]针对传统极值搜索算法存在的颤振问题提出了多种新型极值搜索算法,为研究解决稳定状态颤振问题拓宽了思路。文献[9]利用平均化方法对极值搜索算法进行了稳定性分析。文献[10]针对传统极值搜索算法存在稳定状态颤振的问题提出了无稳定状态颤振极值搜索算法,将动态系统近似为标量系统进行稳定性分析,该算法在特定情况下可收敛至损失函数的全局极值,同时当系统达到稳定状态时几乎无颤振现象。
本文针对文献[10]中的无稳定状态颤振极值搜索算法其稳定性证明限制条件较为严格的问题,利用平均化方法构造了平均化系统,参考平均化系统构造李雅普洛夫函数证明了算法的稳定性,给出了算法中的参数选取条件,并以微喷十字粱实验系统为例进行仿真研究。采用传统极值搜索算法进行了对比仿真,验证了无稳定状态颤振的单变量极值搜索算法可有效减弱系统颤振,可改善算法的稳定性和准确性。
1 无稳定状态颤振的单变量极值搜索算法
考虑一般SISO非线性模型:

假设已知系统的控制律为

将式(2)代入式(1),可以得到闭环系统方程:

极值搜索对象应当满足以下3个假设条件。
假设1:当系统采用控制律u(t)=α(x(t),θ)时,存在光滑函数l:→,使得成立。
假设2并不是必要条件,仅说明即使在不了解模型函数f(x ,u)和l(θ)的情况下,仍存在一个控制律使得系统(3)是渐近稳定。
假设3:存在θ∗∈,使得
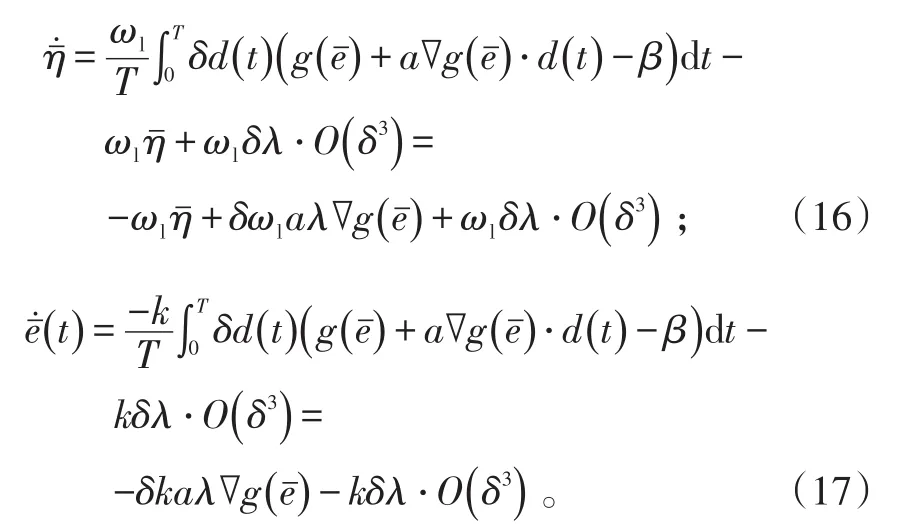
无稳定状态颤振的单变量极值搜索算法结构如图1所示。其中,d(t)是幅值为1;周期为ω的激励信号,主要用于调制和解调信号;k为比例常数;为系统输出信号中的低频信号;η为经低通滤波器过滤后的信号;为调制激励信号的幅值;δ为解调激励信号的幅值;ωh为高通滤波器截止频率;ωl为低通滤波器截止频率。

图1 无稳定状态颤振的单变量极值搜索算法结构图Fig.1 Scheme of single-variable extremum seeking algorithm without steady-state chatter
为了详细地说明极值搜索算法工作原理,可以认为搜索信号θ的变化频率比调制激励信号ad(t)和解调激励信号δd(t)慢得多,因而在某时刻可以将信号θ看作是不随时间变化的,那么可得系统输出,运用Taylor公式可以得到:

理想情况下,该信号经过高通滤波器(HPF)后,将会完全消除低频信号β。因此,经过HPF后的输出信号y-β为

再与激励信号δd()t相乘后,得到反馈信号为
反馈信号中的高频信号部分经积分环节后其影响可忽略不计,即对积分环节产生作用的梯度信号为
在理想情况下,可以得到系统输出函数对于搜索变量θ的梯度。根据自适应控制中的梯度法,为了使系统输出取得极值,沿输出函数的负梯度方向变更参数是合理的,经过积分环节,驱使参数θ向损失函数达到极值时对应的θ∗运动,最终使得当θ=θ∗时,系统输出y也取得极值。
2 稳定性分析
由于完全证明极值搜索算法稳定性具有很大的难度,本文在以往证明限制条件严格的基础上放宽了限制条件,以便更好地证明极值搜索算法的稳定性。控制系统状态方程与损失函数为:

控制输入量为

不失一般性,假设系统搜索变量θ存在对应的值θ∗,使得系统输出有最小值y∗()t,那么搜索变量误差可以为

假设控制对象(8)满足以下条件:

式(11)中:σ1、σ2、σ3、σ4、σ5都是正实数;|e|<γ,γ为已知的正实数。
将系统的控制输入量式(9)、(10)代入系统的状态方程式(8),同时考虑调制激励信号可得

高通滤波器和搜索变量误差的状态方程为:
低通滤波器的状态方程和幅值调节律为:
式(13)、(14)中:ωh>0;ωl>0,通常选择较小的参数,在每个周期里满足,λ为固定正的常值。
考虑到假设2中的x=l(θ),则控制系统存在以下关系:

考虑到系统激励信号ad(t)、δd(t)的输入,将式(15)代入式(13)、(14)中并运用平均化方法,控制器部分的状态方程可得:
式(16)、(17)中,O()⋅为无穷小量。
由式(16)、(17)可知平均化后的系统中,高通滤波器状态量 β经平均化后被消去,结合控制系统式(8)、(9)和式(16)、(17),选取李雅普洛夫函数为

由式(8)、(16)、(17)和假设1、2可知系统达到稳定状态时存在=0,=0,此时,则系统平衡点为=0,=0。
由式(11)中的假设可以得到


假设4:存在合适的正实数k,可以使得

综上所述,通过以上分析可以得到以下结论。
定理1:控制对象如式(8)所示,在满足假设1~3和条件(11)的情况下,选取Lyapunov函数V(ηˉ,eˉ)如式(18)所示,如果系统参数选取满足假设4时,根据Lyapunov稳定性判据,该平均化控制系统(16)、(17)是渐近稳定的。
根据定理1和平均化原理[9],可以得到如下结论:
定理2:当平均化控制对象(16)、(17)渐近稳定时,由假设条件4所确定的系统参数为,当控制对象(8)中选取的参数满足时,针对控制对象(8)设计的极值搜索控制器也是渐近稳定的。
因此,由式(21)可知,极值搜索算法设计的控制器稳定性不仅与滤波器的频率ωl有关,而且与比例系数k、激励信号的幅值δ和幅值调节系数r有直接的关系。
3 仿真分析
为了能将极值搜索算法应用到十字梁微喷系统的俯仰通道,文献[7]构建系统的损失函数为,其中:ϑ为实际俯仰角;ϑ∗为俯仰角给定值。同时,针对十字梁微喷系统的俯仰通道模型,运用极值搜索算法设计了俯仰通道控制器。
本节以十字梁微喷系统模型为仿真对象,采用无稳定状态颤振极值搜索算法对比传统极值搜索算法进行仿真验证。基于极值搜索算法的控制结构如图2所示。图2中:激励信号d(t)=sin(ωt);ρ为固定的信号幅值;θ为极值搜索变量;为俯仰角的微分信号;kd、kp是十字梁微喷系统的设计参数;在实际模型中系统参数c=2.81,b=0.405 16,kd=1.5,kp=-0.5,给定俯仰角ϑ∗=5°。
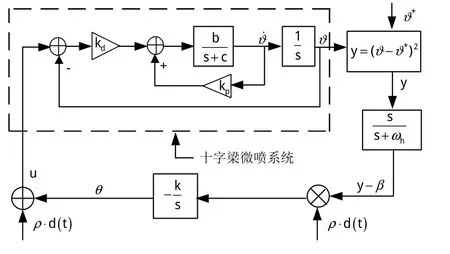
图2 基于传统极值搜索算法的控制结构Fig.2 Control scheme of traditional extremum seeking algorithm
采用图2中的传统极值搜索算法进行仿真,选取控制参数分别为k=10、ωh=2rad/s、ω=1rad/s、ρ=0.1,仿真结果如图3~5中的虚线部分所示。
采用图1所示的无稳定状态颤振极值搜索算法进行仿真,同样选取激励信号d(t)=sin(ωt),选取控制参数分别为k=10、ωh=2 rad/s、ωl=0.1rad/s、r=10、ω=1rad/s、δ=0.1,仿真结果见图3~5中的实线部分。
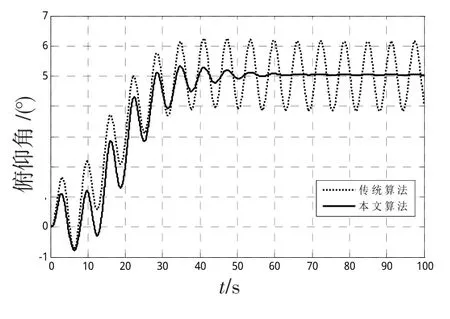
图3 俯仰角ϑ仿真对比图Fig.3 Simulation comparison chart of pitch angle

图4 损失函数输出y仿真对比图Fig.4 Simulation comparison chart of system output
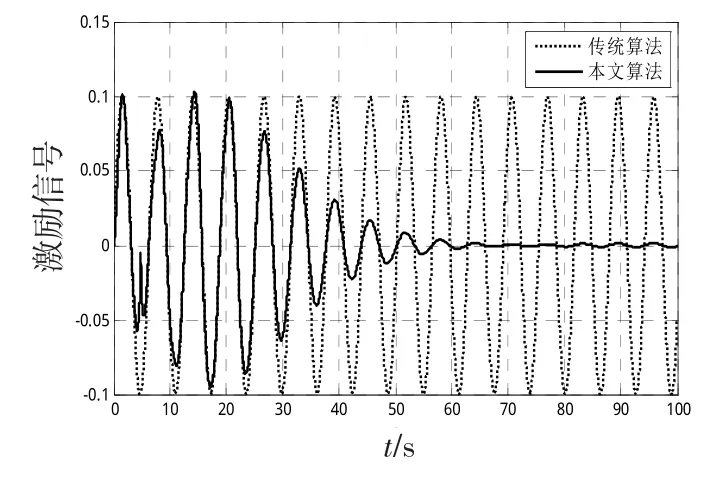
图5 激励信号ρd(t)、ad(t)仿真对比图Fig.5 Simulation comparison chart of pumping signal
由图3~5中的虚线部分可以得到,采用传统极值搜索算法时,由于反馈通道中加入的激励信号ρsin(ωt)中的幅值固定不变,导致俯仰角输出值达到5°时不断颤振,同时输出的损失函数始终存在颤振现象。
由图3~5中的实线部分可以看出,采用无稳定状态颤振极值搜索算法时,激励信号asin(ωt)中的幅值a随损失函数梯度变化进行调节,当使俯仰角输出值逐渐趋近于5°时,激励信号asin(ωt)的幅值趋近于零,俯仰角输出值达到5°时无颤振现象,同时输出的损失函数无颤振现象,改善了算法的稳定性和准确性。
4 结论
本文针对无稳定状态颤振极值搜索算法其稳定性证明限制条件较为严格的问题,利用平均化方法构造了新的平均化系统,参考平均化系统构造李雅普洛夫函数证明了算法的稳定性,对比已有的稳定性证明,给出了算法中的参数选取条件,并针对微喷十字粱实验系统为例进行了仿真研究。
[1]KRSTIC M,WANG H H.Stability of extremum seeking feedback for general nonlinear dynamic systems[J].Automatic,2000,36(4):595-601.
[2]左斌,胡云安,施建洪.极值搜索算法的研究与进展[J].海军航空工程学院学报,2006,21(6):611-617. ZUO BIN,HU YUNAN,SHI JIANHONG.Research and development of extremum seeking algorithm[J].Journal of Naval Aeronautical Engineering Institute,2006,21(6):611-617.(in Chinese)
[3]TAN Y,NEŠIĆ D,IVEN MAREELS I.On non-local stability properties of extremum seeking control[J].Auto-matica,2006,42(6):889-903.
[4]TAN Y,NEŠIĆ D,IVEN MAREELS I.On stability properties of a simple extremum seeking scheme[C]//The 45thIEEE Conference on Decision&Control.San Diego:IEEE,2006:2807-2812.
[5]YING TAN,DRAGAN NEŠIĆ,IVEN MAREELS I,et al.On global extremum seeking in the presence of local extrema[J].Automatica,2009,45(1):245-251.
[6]张雷,胡云安.基于高通滤波器的半全局极值搜索算法研究[J].科学技术与工程,2012,12(29):7580-7584. ZHANG LEI,HU YUNAN.Semi-global extremum seeking algorithm based on high-pass filter[J].Science Technology and Engineering,2012,12(29):7580-7584.(in Chinese)
[7]左斌,胡云安,晋玉强.利用神经网络快速极值搜索算法研究微喷十字梁系统[J].海军航空工程学院学报,2005,20(1):123-126. ZUO BIN,HU YUNAN,JIN YUQIANG.Study on neural network fast extreme seeking algorithms for jet cross beam system[J].Journal of Naval Aeronautical Engineering Institute,2005,20(1):123-126.(in Chinese)
[8]左斌,李静,胡云安.极值搜索算法研究及其应用[M].北京:国防工业出版社,2014:1-8. ZUO BIN,LI JING,HU YUNAN.Research on extremum seeking algorithm and its application[M].Beijing:National Defense Industry Press,2014:1-8.(in Chinese)
[9]IANNELLI L,JOHANSSON K,JONSSON H.Dither for smoothing relay feedback systems:An averaging approach[J].Transactions on Circuits and Systems:Part I,2001,50(8):1025-1035.
[10]WANG LINBIN,CHEN SONGLIN,ZHAO HUI.A novel fast extremum seeking scheme without steady-state oscillation[C]//Proceedings of the 33thChinese Control Conference.Nanjing:Nanjing University of Science and Technology Press,2014:2807-2812.
Single-Variable Extremum Seeking Algorithm Simulation of Steady-State Chatter
ZHANG Leia,HU Yunanb,HAN Qinglongc
(Naval Aeronautical and Astronautical University a.Graduate Students’Brigade; b.Department of Control Engineering;c.Department of Basic Sciences,Yantai Shandong 264001,China)
The single-variable extremum seeking algorithm without steady-state chatter was hedged around with rigorous restrictions,the averaging method was used to construct the averaged system and the system stability was proved.System parameters selection requirement was given at last.The example of experimental system of jet cross beam was used to ap⁃plied simulate.The simulation results demonstrated that the extremum seeking algorithm without steady-state could atten⁃uate state chatter,improve stability and accuracy of algorithm.
single-variable;extremum seeking algorithm;steady-state chatter
TP273+.23
A
1673-1522(2015)05-0447-05
10.7682/j.issn.1673-1522.2015.05.010
2015-06-09;
2015-07-25
国家自然科学基金资助项目(60674090)
张 雷(1988-),男,博士生;胡云安(1966-),男,教授,博士,博导。
