一种库区边坡沉降观测方案及数据分析
2015-12-21曹占虎
曹占虎
(中山市坦洲镇工程建设中心,广东 中山528467)
一些大型建筑物如桥梁、水库大坝及库区边坡等的施工及运行期都需对其稳固性进行变形观测,变形观测方案的制订及测量方法要根据建筑物的性质、现场情况及精度要求来确定。一般来讲,垂直位移采用精密水准测量,水平位移采用基准线法、导线法等[1-2],然而受环境限制,有些地方如陡峭的库区边坡,人员安置棱镜或标尺比较困难,也不安全,施工及运行初期观测密度大,持续时间长,野外工作量大,效率低,有需要采用新技术替代传统方法[3-6]。本文介绍一种边坡变形观测方案,采用免棱镜全站仪施测,人员无需于边坡安置棱镜或标尺,从而便捷安全完成野外观测,实验证明,精度可满足要求。
1 免棱镜全站仪的测距精度
1.1 免棱镜全站仪的测距精度
免棱镜全站仪无需棱镜也可测距,真正实现“所瞄即所测”,同常规全站仪相比,具有使用范围大,测距快,外业工作量小,安全性高等特点,特别适合野外不宜或不方便设置棱镜的场合。但测量标志颜色及测距精度是两个需要考虑的问题,据测定,在外部天气情况良好的情况下,采用红色及白色标志,测距精度分别可达±1.2mm及±0.93mm[7-8],最大测程可达500m,按式(1)计算中误差[5-6]:

式中:I为各次测量均值,Li为单次测距值,n为测距次数,实验中n取10,以上精度可满足普通变形观测的要求。
1.2 免棱镜测距与棱镜测距的精度对比
采用SOKKIA 1130R3免棱镜测距仪,其标称精度:测角±1″,测距单棱镜测程5km,测距精度±(2mm+2×10-6D),免棱镜测程0.3m~350m,测距精度±(3mm+2×10-6D)。TOPCON GTS-311传统测距仪,其标称精度:测角±2″,测距单棱镜测程5km,测距精度±(2mm+2×10-6D),两个仪器单棱镜测距精度相当。实验中免棱镜测距用白色标志,同一距离测距10次,免棱镜测距精度可达±0.93mm,GTS-311传统测距仪测距精度为±0.66 mm,两种仪器测距较差最大值为1.2mm,测距长度60m,从以上数据可看出在测程较短时同等级传统测距仪测距精度高于免棱镜测距,但精度相差不大。
2 工程实例
2.1 工程概况
某库区边坡需进行变形监测,该边坡已喷砂浆,呈灰黑色,且比较陡峭,人员难以进入,坡长115m,坡高20m~40m,测区图见图1。

图1 边坡监测图
2.2 监测方案及精度评定
边坡监测由三部分组成,即坡体水平位移和沉降、坡脚水平位移及沉降。根据现场情况坡体水平位移和沉降监测点15个,坡脚水平位移和沉降监测点6个。在现场30m外,选择易保护稳固方便观测的地方设基准点,水准点和平面点各3个。测区面积小于1km2,根据测量规范[9],平面控制网采用全站仪按二级导线法施测,高程控制采用精密水准仪按三等水准精度测设一条闭合水准线路[10],平面及水准控制网平差[11]后作为基准点数据(表1)。高程控制网的等级为三等,水准测量技术要求、观测级差见表2、表3。根据现场环境均匀布设监测点,监测点覆盖整个边坡,监测点标志采用白色金属标记且锚固在山坡中。边坡毛面每周观测两次,结构梁每周观测一次。控制网采用TC2003招普康全站仪(精度1.0″,1mm 1ppm)及徕卡精密水准仪SPLIWTER0.5施测(精度 0.5mm/km),图1中K1、K2、K3即为监测控制点,平面控制网采用符合导线,有2个起算点GD133及GD134,2个起算点均位于测区外,图1中无显示,高程控制网采用闭合导线,起算点SⅣ3见图1中△。控制网观测完成后,从附近上一级控制点对结果进行检测,检测结果见表4~表7,从中可以看出,控制网各项指标均满足要求,成果可靠,可作为监测的基准点。

表1 边坡监测平面控制网主要技术要求
水准线路应按附合路线和环形闭合差计算,每km水准测量高差全中误差,按以下式计算[11-12]:

式中:MW为高差全中误差(mm);W为闭合差(mm);L为相应线路长度;N为附合或闭合路线环的个数。
考虑到现场条件,为了安全及减少野外工作量,监测点水平位移采用极坐标法用几何水准测量各监测点高程。仪器采用免棱镜全站仪,仪器标称精度为:测程0.3m~350m,精度±(3mm+2×10-6D)。

表2 水准测量的主要技术要求

表3 水准测量测站观测限差

表4 检测结果边长比较

表5 观测结果角度比较

表6 观测结果坐标比较

表7 高程控制网精度评定
2.3 数据分析
2.3.1 边坡变形精度分析
边坡变形测定数据的精度即各监测点的点位精度,各监测点的坐标计算式为:

式中,α为水平方位角,β为铅垂面垂直角,S为斜距。于是监测点的点位总误差为:

因测角精度较高,距离又很近,所以监测点的精度主要依赖于免棱镜测距仪的测距精度,根据本文2中的实验,在视距不超过测程时,测距精度为±0.93mm,达到相关规范要求,根据测区实际取:S=40m,β=40°,ms=2.0mm,免棱镜测距仪测角精度±1.0″,则半测回测角中误差mα=mβ=±2.0″,根据式(4)可计算监测点精度:M=±2.0mm,以上估算表明:免棱镜测距仪所测的点位精度可满足边坡变形观测的精度要求。
2.3.2 监测结果分析
边坡加固处于施工期,边坡监测尚未开始,施工期中对边坡周围建筑物进行了沉降观测,采用国家Ⅱ级变形观测的有关技术及精度要求施测,从监测报警值(见表8)及观测数据(见表9)分析[13-14]:
(1)沉降速率:本阶段各监测点沉降速率在-0.02mm/d~0.04mm/d,最大值为0.04mm/d,沉降速率很小。
(2)累积沉降量:从观测数据可看出,各监测点中累积沉降量有1点为负值,5个点为正值,其余为0,最大值为0.2mm,远小于报警值,负值表示上升,正值表示下降,上升的监测点应为观测误差引起。
(3)结论:综合观测数据,边坡周围建筑物属正常沉降。
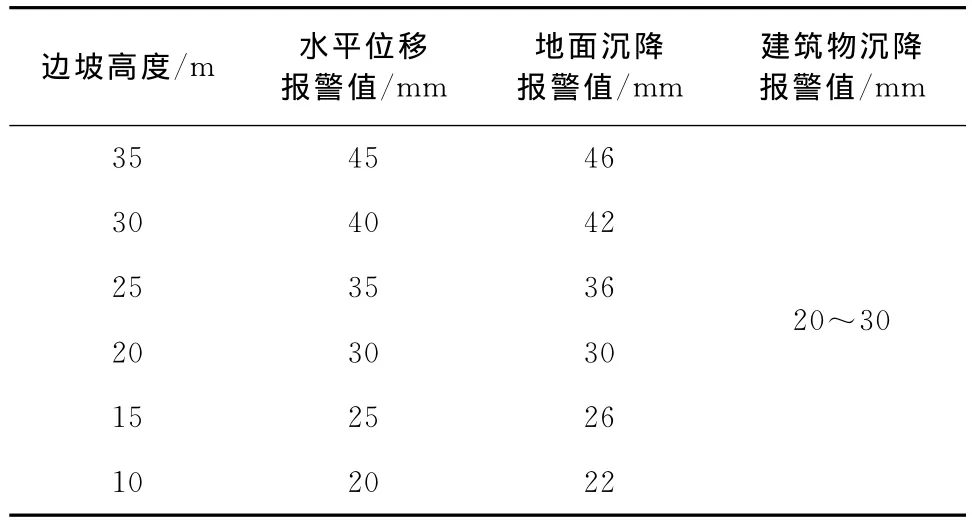
表8 边坡监测报警值
由表9可看出,沉降量最大值为0.2mm(CJ5),累计沉降量最大为值0.2mm(CJ5),速率最大值为0.04mm/d(CJ5)。

表9 边建筑物沉降观测数据
3 结 语
现在各行各业对安全问题越来越重视,很多大型建筑物如水库大坝及库区边坡需要变形观测来判断施工和运行期目标物的稳固性并对沉降趋势进行预报[14-15],在施工期及运行初期监测密度往往较大,野外工作量也较大,而受现场条件限制,陡峭边坡人员进入困难,也不方便放置棱镜,而免棱镜全站仪真正实现了“所瞄即所测”,本文提出一种变形观测的新方案,在这些难以放置棱镜的场合使用免棱镜全站仪施测,实验证明相对传统方法,此方案能够便捷安全完成野外观测任务,大大减少了野外工作量,提高了工作效率,同时精度也可满足要求。
[1]鲍 亮,尤相骏,张 维,等.福建漳州南一水库形变监测系统综述[J].测绘通报,2008,(9):70-71.
[2]曹占虎.非量测近景摄影测量在矿井巷道变形观测中的应用[R].中南工业大学校庆青年学术报告会,1991.
[3]王晏民,洪立波,过静 等.现代工程测量技术发展与应用[J].测绘通报,2007,(4):1-5.
[4]岳建平,方 露,黎 昵.变形监测理论与技术研究进展[J].测绘通报,2007,(7):1-4.
[5]卫建东.智能全站仪变形监测系统及其在地铁结构变形监测中的应用[D].郑州:中国人民解放军信息工程大学,2002.
[6]祝意青,梁伟锋,徐云可,等.西安骊山滑坡区三维变形监测[J].灾害学,2008,(2):33-37.
[7]程效军,张京男,罗 鼎.无协作目标电子全站仪在钢梁变形检测中的应用[J].测绘通报,2007,(4):17-19.
[8]程效军,刘晓明,高 明.利用无协作目标电子全站仪对建筑物立面进行检测[J].铁路航测,2003,29(4):30-32.
[9]中华人民共和国建设部.GB50026-2007.工程测量规范[S].北京:中国计划出版社,2007.
[10]张正禄.工程测量学[M].武汉:武汉大学出版社,2005.
[11]王金龙.误差理论与测量平差基础[M].武汉:武汉大学出版社,2003.
[12]李德仁.误差处理和可靠性理论[M].北京:测绘出版社,1988.
[13]宰金岷,梅国雄.全过程的沉降量预测方法研究[J].岩土力学,2000,21(4):322-325.
[14]邹自力,甘少权.曲线拟合在沉降监测预报中的可靠性检验[J].测绘通报,1998,(8):32-33.
[15]汪 洋,余湘娟,姜 健,等.软基沉降预测模型的比较分析与应用[J].水利与建筑工程学报,2012,10(4):127-130.