基于MC9S12XS128的电磁循迹智能车控制系统
2015-12-21赵泓扬杨建姣
赵泓扬,杨建姣
(1.常州工学院电气与光电工程学院,江苏常州213002;2.吉林农业大学工程技术学院,吉林长春130118)
基于MC9S12XS128的电磁循迹智能车控制系统
赵泓扬1,杨建姣2
(1.常州工学院电气与光电工程学院,江苏常州213002;2.吉林农业大学工程技术学院,吉林长春130118)
摘要:电磁组智能车属于“飞思卡尔”大赛最新的比赛项目组。对于电磁组智能车而言,合理的循迹方案设计是决定速度和稳定性能的前提。采用二值离散化方法划分7个电磁传感器检测区间,配合相应长度和高度的前瞻,控制舵机转向及转角大小,提高传感器的灵敏度和前瞻性。弯道采用单闭环模糊PID算法,从而实现对电机转速的智能控制。利用Matlab中Simulink建模得出较理想的PID控制参数,再通过实际测量对P、I、D 3个参数进行微调。基于以上条件设计的智能车速度可以轻易达到2.9 m/s,满足比赛要求。
关键词:电磁传感器;二值离散化;模糊PID
“飞思卡尔”智能车大赛已经举办了9届,电磁组智能车作为最新推出的比赛项目,其技术最不成熟、比赛难度也较大。相对于光电组和摄像头组,应用电磁技术的智能车将凭借其节能环保、硬件设备简便经济和数据流量小的特点成为未来汽车产业的新秀。MC9S12XS128是飞思卡尔公司推出的16位单片机,其运行速度和处理精度相对于K系列的单片机较低,但是考虑达到电磁传感器采集数据流比较小的特点[1-2],XS128足以满足系统需求,在CordWarrier界面连接下载器能够实现在线调试功能也是其一大优势。本文主要对智能车的硬件设计和算法两方面进行研究,最终提出完整实用的电磁组智能车控制方案。
1硬件设计
智能车控制系统应该包括控制核心、检测单元、执行机构和供电等部分。检测单元包括电磁传感器循迹单元、光电编码器速度检测单元、干簧管起跑线检测单元和障碍检测单元。执行机构包括舵机转向机构和电机驱动机构。系统框图如图1所示。

图1 系统框图
1.1 传感器排布设计
将7个(编号依次为0#~6#)电磁传感器以直线1排用热熔棒固定在碳纤维杆上,电感分布如图2所示。以车体的中心线为中点,3#电感与中心线重合[3]。经过大量实验,电感之间的设计距离如下:2#与3#为7 cm,1#与2#为5 cm,0#与1#为3 cm;右边同理。0#和6#电感安装时应与碳纤维杆在水平方向上成45°,其优点是可以检测到完整的相应位置处磁场水平分量,信号精度进一步提高。

图2 电感分布示意图
1.2 前瞻设计
常用的电感传感器为10 mH,赛道中间铺设的导线通有20 kHz、100 mA交流电。为了满足灵敏度要求和电感检测到的电压信号强度要求,前瞻的长度和高度需要通过实验来确定。前瞻实物图如图3所示。经测得:前瞻长29 cm,高13 cm时,信号检测单元的灵敏度最佳。
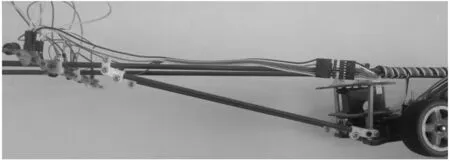
图3 前瞻实物图
2控制策略设计
本文方向控制系统采用二值离散化控制策略,速度控制系统采用单闭环负反馈模糊PID控制策略。舵机转向采用二值化策略可以简化算法,减小反应时间,提高响应速度,效果明显。采用模糊PID算法可以减小电机反应时间,控制超调并减少经典PID的工作量。
2.1 起跑线检测控制策略
对于电磁组车智能车,检测起跑和停止的首选方法为硬件安装干簧管,程序难以直接检测起跑线。当小车两侧的干簧管靠近跑道起始线两端的永磁铁后,干簧管被磁化而吸合。当小车离开起跑线后干簧管又断开,此时程序计数1次,小车经过起跑线。当小车跑完全程回到终点时,干簧管再次动作,程序再次计数。当计数器计数≥2时,控制电机断电并反向减速,程序停止,车停在距离起跑线3 m内。为防止车在比赛过程中因颠簸使干簧管闭合导致车误停,将干簧管竖直放在车体上。
2.2 舵机转向控制策略
设定1个阈值w,作为传感器检测值经A/D转换器变换后的基准值(w与电感的型号、前瞻的高度和长度等多个因素有关)。当检测值大于w时,记为二进制1;当检测值小于w时,记为二进制0。根据0、1所在的传感器范围,设定控制舵机转角的PWM值大小。如果二进制1在0#~2#电感之间,则舵机左转向;如果二进制1在4#~6#号电感之间,则舵机右转向;如果只有3#电感为二进制1,则舵机打正。以3#~6#电感为例,二值化控制策略如表1所示。

表1 二值化控制策略表
设舵机的转角范围为-45°~+45°,应用CordWarrier编程环境与下载器连接实现在线调试舵机转角的功能,完成所需角度时舵机PWM值的设置,提高控制精度。
2.3 电机转速控制策略
小车速度分为直道速度和弯道速度,且直道速度和弯道速度分别进行PID调控。小车在起跑和由弯道进入直道时,调用直道PID,缩短提速时间;进弯时,调用弯道PID,快速减速防止车体冲出跑道。经典PID算法在非线性系统和不能建立小车精确数学模型的情况下,计算过程复杂,需要配合模糊控制器进行调速。电机选用指定型号的RN260-CN38-18130,速度传感器采用四线制增量式的欧姆龙旋转编码器OME-100-1N,而不选用码盘。虽然码盘价格便宜、轻巧便于安装,但其稳定性和准确定较低、使用寿命短,不能满足系统要求。编码器在安装过程中一定要完全与电机齿轮啮合完全,保证工作过程中不漏拍,这是闭环控制实现的前提。
2.3.1增量式PID控制
直道速度采用增量式PID控制方式[4],相对于位置式PID而言,其计算量小且多用于解决实际问题。增量式PID示意图如图4所示。

图4 增量式PID示意图
增量式PID的控制公式为

(1)
只需连续采集3次偏差值就能进行1次增量控制。由于弯道速度要求更高的反应速度和控制精度,故需要配合使用模糊控制。
2.3.2模糊PID控制
模糊PID的输入量为2路参数:位置偏差e及其变化率ek-ek-1。经模糊量化得到e、ec,由e和模糊控制规则得到控制量U,并查询模糊控制表得到PID整定后的3个参数,再进行控制运算[5]。应用模糊PID控制的系统不仅稳定性能好,其超调量很小并且很少发生振荡现象。模糊控制的结构图如图5所示。
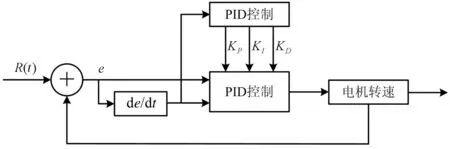
图5 模糊PID控制器结构图
根据e和ec(偏差变化率)的不断变换,模糊控制通过控制规律实现PID参数的在线修改。为保证系统稳定性,避免积分饱和、减少超调量和增强抗干扰能力,规定其控制规律为:


3结果分析
3.1 舵机转向测试
小车在直道上舵机几乎无摆动,入弯时角度平滑;在小S弯道上几乎无摆动直速通过,全程车体紧靠中心线,反应灵敏、效果明显。入弯与S弯道实际效果如图6所示。
3.2 电机转速测试
根据设定的控制策略在Matlab里建立控制模型[6],分别得到直道与弯道上的控制模型和仿真结果(见图7~9)。

图6 实际效果图
由图9(a)波形图可知,放大倍数较小导致响应时间较长,微分常数较大导致抗干扰能力差,需进行调整。
由图9(b)可知,系统提高放大倍数,减小微分常数,反应效果明显改善。
图9(c)为直道PID调节最终结果,电机转速能快速并准确到达设定值,此时P=50,I=1,D=0.01。
图9(d)为弯道模糊PID的仿真结果,与图9(c)相同参数条件下的直道PID相比,作用效果更加明显。
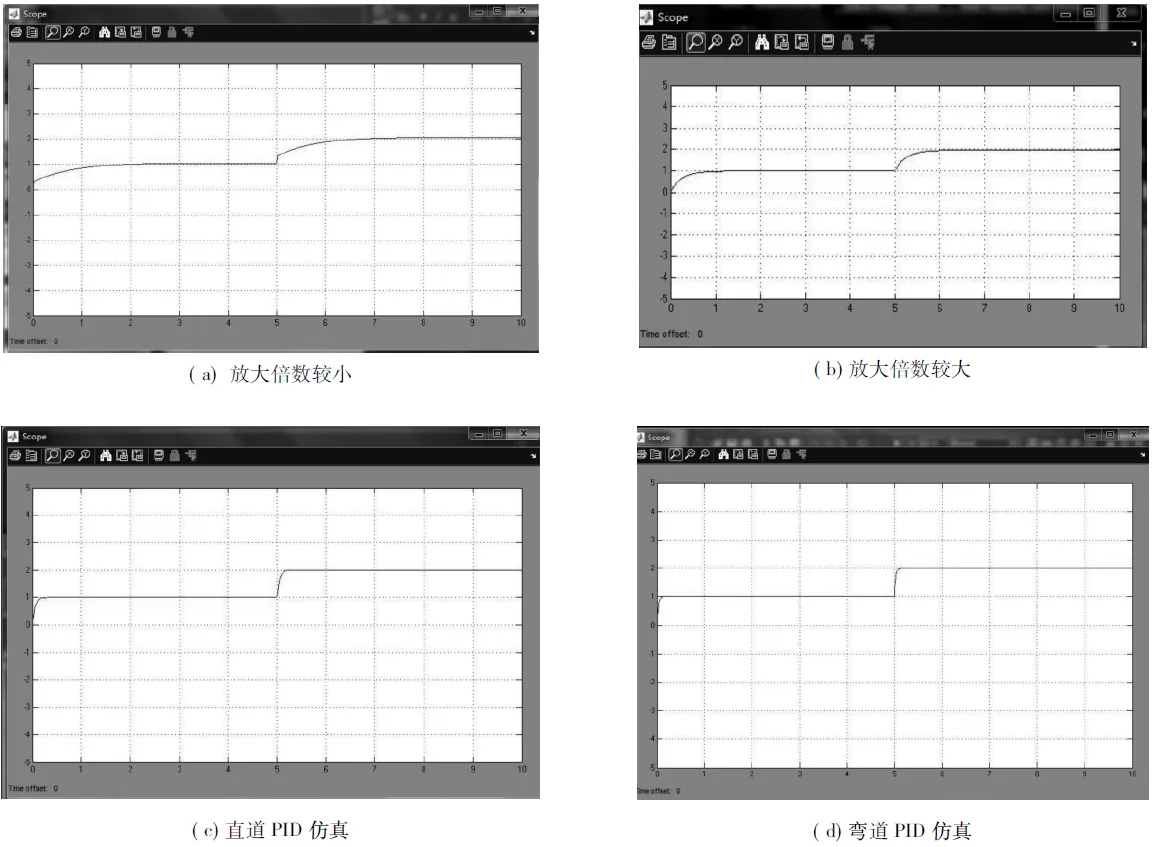
图9仿真分析曲线图
4结论
本文针对电磁组智能车的硬件设计和控制策略进行了研究,采用二值离散化控制舵机转向和转角,利用增量式PID控制直道速度,模糊PID控制弯道转速,并应用Simulink仿真对控制过程的参数进行调整实现最优化,为智能车的控制研究提供了新方法。
[参考文献]
[1]摆玉龙,杨利君,董存辉.基于MC9S128的电磁导航智能车的设计与实现[J].测控技术,2011,30(11):20-23.
[2]王元哲,扈宏杰.磁导航智能车系统的设计与实现[J].自动化仪表,2011,32(11):5-8.
[3]李涵武,崔宏耀,张娜伟,等.基于电磁场检测的智能寻迹模型车设计[J].黑龙江工程学院学报:自然科学版,2011,25(2):23-25.
[4]徐莺.基于间接PID的智能控制算法研究[J].湖北广播电视大学学报,2008,28(5):155-156.
[5]MathWorks.FuzzylogictoolboxforusewithMATLAB:User′sguide.[EB/OL].[2015-02-10].http://www.mathworks.com.
[6]刘金琨.先进PID控制及其MATLAB仿真[M].北京:电子工业出版社,2003.
责任编辑:陈亮
Research on Tracking System for Smart Cars Based on MC9S12XS128ZHAO Hongyang1,YANG Jianjiao2
(1.School of Electrical and Photoelectronic Engineering,Changzhou Institute of Technology,Changzhou 213002;
2.College of Engineering and Technology,Jilin Agricultural University,Changchun 130118)
Abstract:Electromagnetic group smart car is the latest group event of the Freescale competition.For electromagnetic smart cars,rational design of tracking program is the premise that determines the speed and stability.In this paper,seven electromagnetic sensor range is divided by the method of discrete binary,which works for controlling the direction and angle of servo and improving the sensitivity as well as the forward-looking with corresponding length and height of the sensor.Single closed loop fuzzy PID algorithm is used for enabling the intelligent control of motor speed in bend.Batter parameters are obtained through modeling on Matlab Simulink and then are fine turned through actual measurements.The speed of smart cars can easily reach 2.9 m/s to meet the competition requirements based on the above design.
Key words:electromagnetic sensor;discrete binary;fuzzy PID
中图分类号:TP391.8
文献标志码:A
文章编号:1671-0436(2015)04-0025-05
作者简介:赵泓扬(1979—),男,硕士,讲师。
基金项目:常州工学院教学改革研究课题(A-3002-13-010)
收稿日期:2015-06-08
