基于遥感图像的舰船目标检测与参数估计方法
2015-12-20董凯旋张宇琦
董凯旋,张宇琦,李 政
(西安电子科技大学物理与光电工程学院,陕西西安 710071)
在光学遥感图像舰船目标检测方面,光学遥感影像中虽能观测到舰船并表现出其一些信息,但相对于SAR图像,利用光学图像进行舰船检测和分类的技术相对滞后,仍在研究中。由于光学传感器成像受气象、云层覆盖和光照等因素限制实用性有限,或保密的原因,国外公开报道较少,我国在这方面的研究也仅限于理论,研究主要集中在高分辨率图像中的目标检测。相对于SAR图像,光学图像分辨率高、解译简便,在分类和识别方面具有一定优势,因此研究光学图像中的舰船检测具有重要意义[1]。
1 舰船尾迹检测预处理
在光学遥感图像中,舰船灰度一般相对于海域背景灰度较高,影像中会存在陆地,而陆地相对于海域通常较亮,这种背景的图像由于受陆地地物的影响,使得直接使用一次分割进行舰船目标检测较为困难。因此,先对遥感图像进行灰度转换,以提高遥感图像的可解释性,提升图像的质量和突出所需信息,使图像中的线与边缘特征得到加强,从而有利于舰船目标的提取。此外,图像在获取和传输的过程中,由于传感器的误差及大气影响,会在图像上产生一些噪声,为抑制噪声改善图像质量或减少变化幅度,使亮度变化平缓,需要对图像进行滤波平滑处理。最后,将包含舰船及其尾迹的海域从图像中分离出来,去除陆地的影响,从而确定舰船检测的具体范围,再在海域中进行目标检测,这样便可提高目标检测的准确性及效率,同时降低尾流参数估测的复杂性[1-8]。处理流程如图1所示。

图1 图像预处理流程图
2 舰船目标尾迹特征提取及航速航向估算
2.1 舰船尾迹长度提取
2.1.1 灰度累积法
基于线性特征的尾迹检测方法实际上可视为沿一定方向的积累过程。考虑沿尾迹方向以一定的长度直接进行灰度积累,即得到的灰度均值比沿其他方向积累得到的均值大或小。可与舰船检测相结合,在舰船目标的周围计算各个不同方向上一定范围内的像素点灰度累计值,再取一定阈值,高于或低于该阈值的就视为有尾迹特征。
设已计算出的舰船重心点为(i,j)、length为累积半径、step为累积步长、θ为角增量,算法流程如图2所示[9]。
在进行灰度累积时,需统计给定方向和长度的线段上像素灰度累计值、均值及标准偏差,并绘制相应的曲线以供分析。累积半径应与航迹的长度相当,即所得曲线上的尖峰和低谷能充分显示航迹的存在。过长或短均会受到图像中噪声的干扰,引起检测结果的不准确。而航迹的长度、船航行速度及海面条件等与实际参数有关。累积步长的选取直接影响计算量,故需要计算量减小,加快检测速度,为实现实时或近实时监测海面提供方便。其中,累积步长大则计算量就小,但过大则有可能漏检航迹,通常选择为1°~3°。
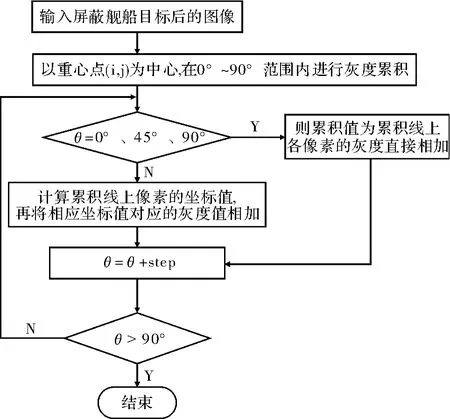
图2 灰度累积算法流程图
为得到累积曲线后,需从累积曲线中分析是否存在尾迹特征。由于曲线上尖峰和低谷相对于附近累积值的变化较已剧烈,拟合后的曲线在累积曲线尖峰和低谷处与原始值相差较大,当这种差别超过一定阈值范围时,认为其对应的是尾迹特征。所以,确定阈值曲线成为关键,在此所用的阈值曲线是在所用的扫描曲线基础上加入和减去nσ(σ为累积曲线标准偏差,n一般取3),分别表示上下2条域值曲线,若累积曲线超出上面一条域值曲线则认为出现尖峰,即存在亮尾迹;同样,扫描曲线低于下方域值曲线则认为出现低谷,即存在暗尾迹。
对于近似直线舰船尾迹,可直接对舰船尾迹图像进行预处理,再分别计算获得舰船尾迹在水平方向和垂直方向上的投影长度,最终计算得到舰船尾迹长度。对于曲线舰船尾迹,一般可用多项式拟合累积曲线[10],若遥感图像上舰船航向平滑简单或变化有一定规律,可直接利用简单的二次多项式拟合获得近似尾流曲线,且一般情况下,多项式的次数越多,需要的数据就越多,而预测也就越准确。若遥感图像上舰船航向复杂多变且运动趋势不明确,多项式拟合方法可能会产生龙格现象,该种情况下难以精确提取舰船尾迹长度。
2.1.2 Radon变换算法
Radon变换是检测遥感图像中线性特征的有效工具。但在有大量噪声或强杂波存在的情况下,单纯利用Radon变换来检测无法使虚警率降低到可被检测范围内。因此,根据Radon变换的原理和特性,结合形态学变换方法,采用对目标区域进行局部Radon变换的检测方法来进行舰船尾迹检测。
Radon变换原理如图3所示,在二维欧氏空间中Radon变换为

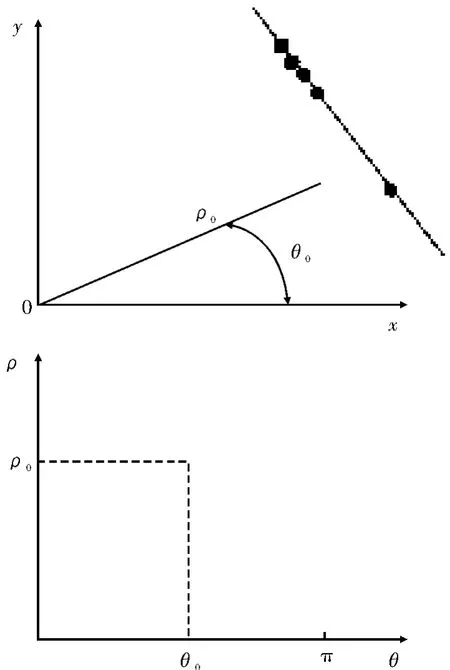
图3 Radon变换原理
其中,D指坐标为x-y的整个图像平面;g(x,y)为在坐标(x,y)处像素的亮度;δ为Dirac函数;ρ指由原点至直线的法线距离;θ为直线的法线与x轴的夹角。其坐标关系如图4所示。

图4 Radon变换坐标关系图
若θ和(或)ρ为定值,则可得到一变换的样本。要获得全变换可理解为和ρ变化,对任意θ和ρ,f是确定的。Dirac函数的出现使得F(x,y)的积分在直线ρ=x cosθ+y sinθ上进行。
传统Radon变换在平面图像域中沿任何可能存在的直线将其像素的亮度进行积分,从而使得线性特征更为明显,直线的积分对应于Radon变换空间中为一个单点。一般而言,若遥感图像中的一条直线上像素的强度不同于背景,在变换域就能得到一亮或暗的峰值。因此,在变换域中的一个亮或暗的点相对于原图像中则为亮或暗的直线。
对边缘检测过后的二值图像进行适度旋转和裁剪,并对处理过后的图像进行Radon变换。为了对尾迹二值图像进行长度提取,通常只需选取一定的角度,这也可提高算法速度。实验选取θ=90°,经Radon变换后的积分值反映的是线段长度信息,可通过阈值去掉不够长的线性区域即可得到尾流长度信息。
2.2 舰船运动参数提取
2.2.1舰船航速
从肉眼观察来看,尾流的持续时间与航速有关,且随着航速的增大,持续时间显著增加。对千湖1号在航行速度分别为5 km/h、10 km/h和15 km/h 3种不同航速下拍摄,尾流持续时间依次约为20 min、15 min和7 min,因此近似地认为,尾流的持续时间是航速的线性函数,该线性函数可表示为

式中,k为比例系数,在上述实验条件下近似为7/5=1.4,b是一个小修正量,对应于上述3种航速的情况分别等于0 min、1 min、-1 min。
对于时间T,可用尾流长度L与其速度v之比来近似表示,即T=L/v,故式(1)可作变换

即,v可表示为仅与尾流长度L有关的函数

对于式(3),由于b是一个较小的修正量,且尾流长度 L为 20~50倍船长,可达数千米,故,由此可得舰船近似速度

2.2.2 舰船方向
对于本文的近似直线尾迹,可在上述尾迹长度提取算法中灰度累积法的基础上确定舰船航向。在舰船目标的周围分别计算0°和90°两个不同方向上一定范围内的像素点灰度累计值,再取阈值,高于或低于该阈值的就视为有尾迹特征。利用此方法分别获得舰船尾迹在水平方向的投影长度L水平和尾迹在垂直方向上的投影 L垂直,如图5所示。获得舰船航向与垂直方向夹角


图5 舰船尾迹投影
3 实验结果及误差分析
本文主要针对两种不同舰船尾流的几何特征结果,估测舰船速度及航向并予以对比和分析。原图如图6所示,对原图像进行处理后,获得舰船尾迹图像如图7所示。

图6 图像(a)

图7 舰船尾迹检测
通过对舰船检测二值图像进行裁剪和适当旋转,可获得如图8的舰船尾迹图像,对舰船尾迹二值图像进行Radon变换,结果如图9所示。由此可看出,对二值图像进行90°变换积分,设定恰当阈值,对应所得的峰值在横轴上的跨度即为舰船尾流所占像素个数。若设定阈值为2 000,则可估算出像素个数约为360。但由上图可看出,Radon变换结果的横轴坐标间隔为100个像素点,因此无法从图中精确读取像素个数,仍存在一定的局限性。

图8 裁剪

图9 Radon变换(90°)
故在文中,对舰船尾迹二值图像分别进行0°和90°灰度累积,设定在图像0°方向,即水平方向上灰度累积的最小阈值和最大阈值分别为10和30个像素;设定在图像90°方向,即垂直方向上灰度累积的最小阈值和最大阈值分别为3和30个像素,在此阈值范围内图像有尾迹特征。并分别获得尾流在水平方向和垂直方向上的投影,最终利用上述舰船航速与航向提取方法求得速度v与航向角度θ。
实验中获得的舰船尾流所占像素为376,本次实验图像是从Google Earth提取的,其分辨率为1.0,尾流长度L=376×1.0=376 m。故由式(4)和式(5)可得6.606 5°。
在舰船尾迹检测过程中,测得的尾迹可能会与真实舰船尾迹出现一定的偏差,这是由于舰船气泡尾流的长度与尾流中气泡的浓度、检测仪器的分辨率有关,气泡浓度越大,仪器分辨率越高,尾流信号越明显[11]。为进一步探讨舰船因素对尾流探测及舰船航速估测的影响,本文利用相同海洋环境条件下的舰船尾流图像如图10所示,对原图像进行处理后,获得舰船尾迹图像如图11所示。

图10 图像(b)

图11 舰船尾流检测图像
而对舰船检测二值图像进行裁剪和适当旋转,如图12所示。对舰船尾迹二值图像分别进行0°和90°灰度累积,最终获得舰船尾流长度L=720.100 7×1.0=

图12 图像剪切与旋转
对于不同类型舰船,尾流沿纵向的衰减与L/B值关系密切。L/B越大气泡数密度值衰减得越慢,且尾流沿长度方向会呈现不同形状和长度,从而间接影响到舰船航速与航向的估测结果。
本文研究的是近似直线尾迹,对于此类舰船尾迹,可直接利用舰船尾迹在水平方向和垂直方向上的投影长度计算得到舰船尾迹长度。但对于曲线舰船尾迹,一般可用多项式拟合的方法拟合累积曲线,若遥感图像上舰船航向平滑简单或变化有一定规律,可利用简单的二次多项式拟合获得近似尾流曲线,且一般情况下,多项式的次数越多,需要的数据就越多,而预测也就越准确。若遥感图像上舰船航向复杂多变且运动趋势不明确,多项式拟合方法可能会产生龙格现象,这种情况下难以精确提取舰船尾迹长度。
4 结束语
利用高分辨率光学遥感图像来检测舰船目标及其尾迹是海洋遥感领域的研究热点之一,本文的主要工作正是围绕海洋遥感图像中的舰船检测展开的。文中的主要工作集中在遥感图像舰船目标检测的方法研究,尾迹检测方法研究和利用尾迹的几何特性估算舰船速度,并对直接灰度累积算法和Radon变化原理进行了讨论,并与舰船目标检测相结合,分别利用两种算法对舰船目标特性进行了针对性提取。在对舰船航速估算方法的研究过程中,将尾迹的长度特性与舰船速度估算相结合,获得仅与尾流长度相关的速度与航向估算函数,极大地简化了舰船的速度与航向估算流程。
本文所提出的舰船目标检测与参数估计方法,主要基于对舰船尾迹的检测和长度提取。因此,如何更精确地检测舰船尾迹和获取尾迹长度将是下一步研究的重点,尤其是对于曲线舰船尾迹的检测和长度提取精度的提高,将进一步促进本算法的精确性。
[1]崔红,常洋,张建生.基于Matlab的尾流图像数字化处理[J].光子学报,2010,39(12):2274 -2277.
[2]罗昭拓.高分辨率遥感图像中道路提取的分析与研究[M].上海:上海交通大学,2008.
[3]崔兆华.改进的Snake模型及其在多飞机标提取中的应用[D].沈阳:东北大学,2008.
[4]王旭红.遥感影像数据挖掘技术研究[D].西安:西北大学,2005.
[5]周丽雅.遥感影像融合及质量评价研究[D].郑州:中国人民解放军信息工程大学,2006.
[6]Otsu N.A threshold selection method from gray level histogram[J].IEEE Transactions on Systems,Man and Cybernetics,1979,9(1):62 - 66
[7]陈海亮.基于特征的光学遥感图像舰船目标检测技术研究[D].长沙:国防科学技术大学,2010.
[8]冈萨雷斯.数字图像处理[M].2版.阮秋琦,译.北京:电子工业出版社,2005.
[9]李红康,王建国.基于灰度累积的遥感图像舰船尾迹检测[J].兵工自动化,2007,26(9):66 -67.
[10]李红康.海洋遥感图像舰船目标及尾迹检测研究[D].成都:电子科技大学,2008.
[11]田雪冰,顾建农,张志宏,等.舰船主尺度参数对舰船气泡尾流几何特性的影响[J].舰船科学技术,2012,34(1):6-10.
