小阵面相控阵雷达波束控制系统的实现
2015-12-20弓晓颜
弓晓颜
(中国电子科技集团公司第20研究所雷达部,陕西西安 710068)
相控阵雷达是一种采用相控阵天线实现电子扫描的雷达,其天线波束可在天线阵面不动的情况下实现扫描,具有扫描灵活、快捷的特点,而天线波束的指向和控制是通过波束控制系统实现。波束控制系统不仅要快速精确地计算出各个阵面单元移相器的波束控制数码,对天线单元之间的幅度和相位误差进行修正补偿,使天线快速准确地指向预定的空间方向,且需要对移相器的工作状态,故障等信息进行监测和控制,在工程实践中还要满足在天线测试状态下能够灵活单独地控制每一个移相器的波束控制数码和工作状态,完成天线的测试。
1 波束控制数码的计算
波束控制系统根据雷达中心控制计算机提供的天线波束指向角信息,频率信息等,在规定的时间内,计算出波控运算基码,再根据各单元的相对位置计算出每个单元所需的相位值,将各个单元的波束控制数码及状态控制码通过驱动后分发至各单元,实现对波束指向的控制。文中通常将阵面放在直角坐标系中,并根据阵面的形状及计算的便捷性选择其放置的位置,若阵面具有对称性一般将阵面中心点放置在坐标原点位置进行计算,根据对称性可减少运算次数,波束控制数码的基本计算公式为
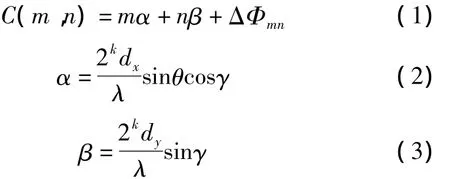
其中,C表示第m行,第n列单元的K位二进制波控码;α,β是根据方位角度,俯仰角度,及频率计算出的X方向和Y方向的波控运算基码也称为初始布相值;m,n为阵面单元相对坐标原点的位置坐标;θ是波束指向的方位角度,γ是波束指向的俯仰角度;dx是X方向方位面相邻阵元之间的距离;dy是Y方向俯仰面相邻阵元之间的距离;ΔΦmn为各种因素下引入的总相位误差的相位补偿码;K为移相器位数,但在实际应用中为了降低波束跃度,波束控制系统在运算中常采用多于实际移相器位数的虚位计算法计算波束控制数码,即采用较高的K值进行计算,取其高位部分,舍去低位部分。而K值也不能随意增大,需满足下面的条件

式中,N为天线单元数;m为实际移相器位数[1]。
2 小阵面波束控制系统的设计
波束控制系统的设计要根据阵面单元的规模,雷达的功能、波束变换的时间、设备量、成本等因素选择不同的控制模式。波束控制系统一般可划分为集中式波束控制系统和分布式波束控制系统[2]。分布式控制方法主要应用于大规模阵列的相控阵系统,而对于阵面单元较少的雷达,则采用集中式控制,查表的计算方法[3]。此次设计的波束控制系统为了满足小阵面相控阵雷达系统快速进行波位变换的指标要求,采用DSP,FPGA加外部存储器SDRAM的集中式控制设计方法,该系统组成框图如图1所示。
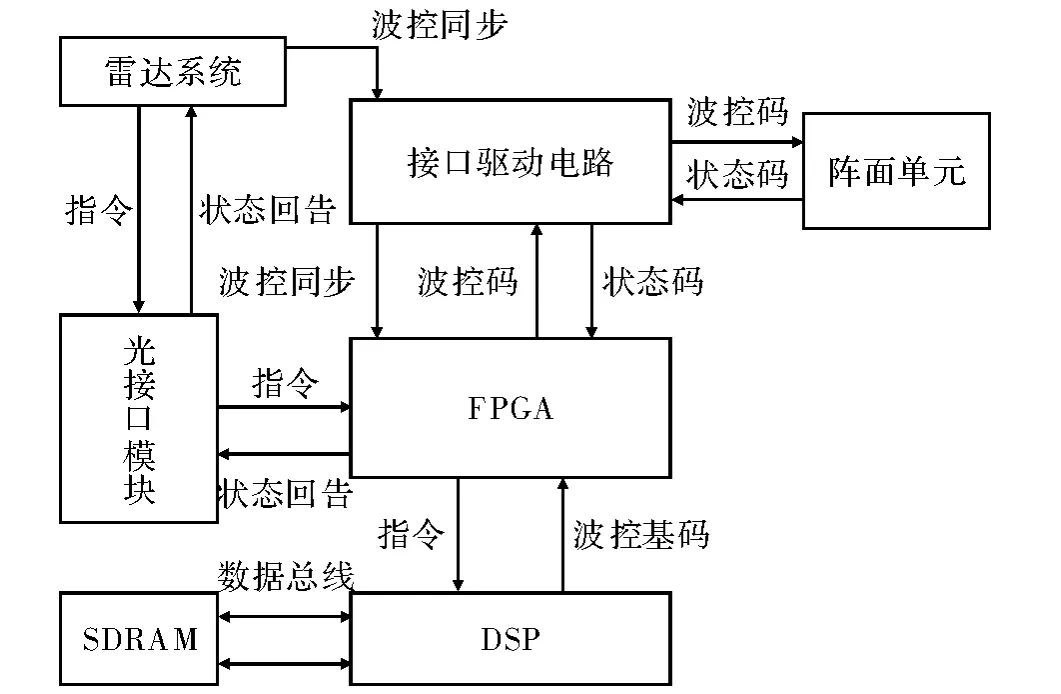
图1 波束控制系统组成框图
DSP选用高性能的静态超标量处理器ADSPTS101,最高工作频率为 300 MHz[4],对外连接两片串联的32 MB容量的SDRAM,形成32×32 Mbit的外部存储器。DSP是波控运算基码的计算和存储中心,能够灵活地实现对程序的在线控制修改和调试。FPGA则根据阵面单元数量选用两片Xilinx公司K7系列XC7K325T,该芯片有丰富的I/O管脚,拥有多路Rocket I/O高速串口收发器,通过调用内部IP核的方法,可以方便快速的将高速串口数据转换为并行数据,也可将并行数据转换后通过 Rocket I/O串行输出[5]。FPGA并行计算产生各个单元所需的波控码和控制码,快速进行接口转换。FPGA与DSP通过32位数据总线和32位地址总线相连,通过总线并行传输的方式进行数据的交互。采用DSP与FPGA相结合的方法,利用各自的优势,有效地缩短了波速转换的时间,增强了波束控制系统的可控性,具有一定的扩展性[6]。
光接口模块采用单纤双向型收发模块,传输速度最大支持3.125 Gbit·s-1。由于波束控制系统离雷达中心控制系统较远,设计使用光纤传输的方式接收雷达中心控制的指令,降低了长线传输的误码率,提高了传输速率。光电转换模块将光信息转换为高速串行数据,传输至FPGA。接口驱动电路则根据阵面单元组件的接口类型、完成数据、时钟及控制信号的驱动,其中时钟以差分驱动形式支持20 MHz的时钟频率。
3 小阵面波束控制系统的实现
该波束控制系统的工作流程为雷达中心控制系统通过光纤传输将雷达的频点号,方位角度,俯仰角度及工作模式等信息传送给波束控制系统,DSP根据指令信息查表找出相应的波控运算基码,FPGA计算各个单元布相码并与补偿码相加得到最终的波控码通过驱动送至移相器,完成一次布相[7]。
DSP软件在VisualDSP++5.0环境下采用C语言的方式进行程序的编写,C语言较DSP的汇编语言可读性强,便于软件的维护和修改。DSP软件的工作流程如图2所示,DSP上电后先根据预先设置的方位,俯仰和频率号的顺序,顺次计算所有扫描范围内的波束指向的波控运算基码,并严格按照约定的格式存入SDRAM,然后等待雷达中心机的指令,根据指令中的工作状态、方位角、俯仰角、频率信息,查表找出对应的波控运算基码,通过总线传输的方式发送给FPGA。查表计算的方法需要容量强大的存储器,只存储波控运算基码可降低存储设备的容量,同时也减少了数据传输的数量,缩短了传输的时间。在雷达系统频点少,波束转换较慢,存储器容量满足的情况下,也可由DSP预先计算完成阵面内所有单元的波控码并存于SDRAM中,FPGA只完成存储和转发的功能。
FPGA则采用Verilog语言在ISE13.3的环境下进行编写,FPGA利用内部IP核将指令快速转换为并行数据并通过总线发送给 DSP。在系统工作模式时FPGA根据DSP的波控运算基码,计算各单元的移相码,再选出预先存储于FPGA中的该频率下的相位补偿码与移相码相加,将最终的波控码存入内部存储器中,在波控同步信号有效时,同时将各时序脉冲,波控码及控制码按约定顺序以同步串口方式通过接口驱动电路送至阵面单元[8]。接收阵面单元的工作状态信息,实时检测各单元的温度,电源状态是否正常,进行过温过压的保护控制,并将监测结果回报给雷达的BIT系统。在测试模式时FPGA根据DSP的指令分别控制单个移相器的波控码及收发状态,完成天线测试和相位补偿码的测量功能;在自检模式下根据系统的格式要求,控制每个移相器的工作状态,完成自检功能。图3为FPGA在工作模式下的流程图。
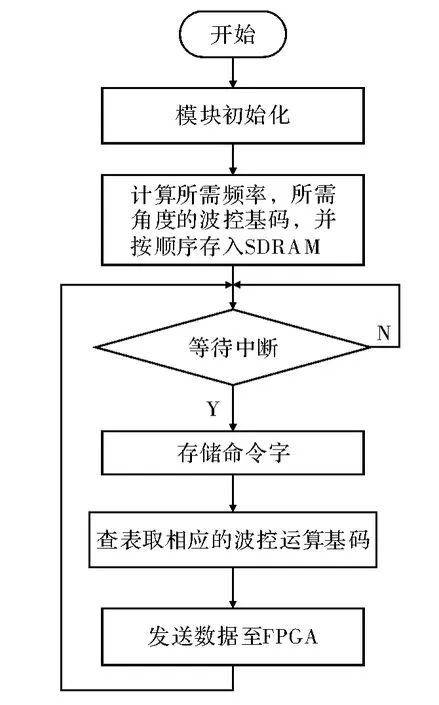
图2 DSP软件流程图
该设计方法体积小且能够快速实现布相,完成天线指向的控制。若DSP工作频率为280 MHz,同步串口时钟频率10 MHz[9],所传输的移相码及控制数据为32 bit,则完成一次布相时间为约为4μs。大幅缩短了波束转换时间。
4 结束语
设计应用在小阵面相控阵雷达中,体积小、设备量少、成本低、工作速度快。在实际工程应用中工作稳定、测试方便、可靠性高。对于大规模的相控阵雷达,集中式查表法阵面布线复杂,存储容量有限,无法满足其性能指标,但该波束控制系统中采用了高速DSP处理器和大规模集成电路FPGA相结合的方法,可作为分布式波束控制系统的主波束控制系统使用,对于波束控制系统的设计具有一定的参考性和通用性。

图3 FPGA工作状态流程图
[1]张光义,赵玉洁.相控阵雷达技术[M].北京:电子工业出版社,2006.
[2]向敬成,张明友.雷达系统[M].北京:电子工业出版社,2001.
[3]胥志毅.基于嵌入式ARM的雷达波束控制系统[D].南京:南京理工大学,2010.
[4]刘书明,苏涛,罗军辉.TigerSHARC DSP应用系统设计[M].北京:电子工业出版社,2004.
[5]田耕,徐文波.Xilinx FPGA开发实用教程[M].北京:清华大学出版社,2008.
[6]李祥荣.毫米波有源相控阵雷达波束控制系统的设计与应用[J].电视技术,2009,49(1):79 -80.
[7]李琳,张羽,陈之涛.基于SOPC的波控系统设计[J].科技信息,2011(12):795-796.
[8]廖昌明.基于查表法的波控系统的设计与实现[J].电子工程师,2008,34(4):7 -9.
[9]孙国平.一种基于并串结合方式的波控系统设计[J].现代雷达,2010,32(4):25 -27.