基于视觉搜索的舰船跟踪方法研究与仿真
2015-12-20樊凌
樊 凌
(1.江苏科技大学 苏州理工学院,江苏 苏州215104;2.苏州市职业大学 计算机工程学院,江苏 苏州215104)
0 引 言
随着计算机视觉图像处理技术的发展,采用计算机视觉特征分析和图像处理方法实现对军事目标的跟踪和识别,对提高目标的跟踪搜索和打击能力,具有重要的应用价值和意义。舰船作为海战的重要平台,对舰船目标的视觉分析和图像处理,通过对舰船目标视觉搜索跟踪和特征提取,在计算机视觉中成像,实现舰船目标打击,成为国防科技领域和计算机图像处理领域研究的热点。舰船在海面上航行,受到外界环境噪声干扰和水面的抖动影响较大,在图像特征分析中常常会丢失部分有用信息,不能满足高精度、高清晰度图像识别要求,因此,需要研究一种有效的基于计算机视觉搜索的舰船跟踪方法,通过计算视觉处理技术,结合电子稳像和图像处理技术,使图像清晰稳定的同时,提高视觉跟踪搜索能力,相关的算法研究受到人们重视[1]。
传统方法中,对舰船目标的视觉特征提取和目标跟踪搜索方法主要有时频特征提取算法、基于块匹配的目标轮廓检测算法、基于白平衡的舰船亮点检测算法和基于高分辨率灰度中值滤波的舰船图像边缘检测算法实现对舰船目标的视觉搜索和跟踪[2]。其中,文献[3]提出一种基于块匹配的电子稳像实现舰船目标的敏感特征检测和视觉搜索,提高目标的识别率,但是该算法需要对舰船目标进行空间亮度均衡化处理,在海上浓雾环境下目标识别性能不好;文献[4]提出一种基于点分布模型(Point Distribution Model,PDM)的块匹配方法实现对舰船的视觉搜索和跟踪,模板形状的构建以及约束规则形成过程中容易产生视觉偏移,导致舰船目标的视觉特征漏检,搜索性能不好;文献[5]提出一种基于LWT 小波分解舰船视觉边缘轮廓特征提取算法实现对舰船视觉搜索跟踪,对采集的舰船图像进行亮度补偿和纹理分区,使得对舰船图像的重构效果较好,但该算法的问题是计算量大,巨大的开销导致目标识别的实时性不好。可见,传统方法采用舰船目标轮廓亮点检测方法实现对目标的视觉搜索,在图像模糊和背景干扰较强时,检测效果不好[6-10]。
针对上述问题,本文提出一种基于相邻帧补偿和尺度不变特征变换的舰船视觉搜索跟踪算法。首先构建了舰船目标图像的视觉特征采集模型,采用电子稳像技术对舰船视觉信息进行直方图均衡处理,以此为基础,采用尺度不变特征变换 (Scale Invariant Feature Transform,SIFT)对舰船目标进行角点特征提取。根据提取的角点特征进行干扰滤波算法设计,提高了对舰船目标的视觉搜索和跟踪识别能力,仿真实验进行了性能验证,展示了本文算法在提高舰船目标跟踪识别的准确度,提高舰船视觉特征提取的稳像能力方面的优越性和有效性。
1 舰船视觉图像采集和电子稳像预处理
1.1 舰船视觉图像采集模型
舰船视觉图像采集过程是舰船目标图像的三维成像过程,在舰船高速运动和水面的不稳定场景下进行图像采集时,摄像机安装在震动的环境中,舰船视觉图像特征采集不稳定,在图像采集和三维建模过程中,采用视角变化和仿射变换方法,提高舰船目标视觉特征采集的稳定性能,采用电子稳像方法对图像采集结果进行稳定性处理,采用分块处理方法舰船图像进行三维建模,舰船视觉特征图像初始分块的大小15 ×15,每帧图像尺寸大小m ×n 决定了图像的像素点数,为了获得视觉清晰的舰船目标图像,建立图像全局运动估计模型,对舰船目标的视觉特征图像进行旋转和缩放参数估计,这一过程描述如图1 所示。

图1 舰船目标的视觉特征图像参数估计模型Fig.1 Visual features of ship target image model parameter estimation
结合图1,根据已知的运动参数,对舰船目标的视觉特征进行块匹配,形成3 ×3 结果的网格模型,对舰船目标图像进行单帧视觉分析:设舰船目标图像的宽为W、高为H,假设单位时间内图像运动幅度为(W/2)× (H/2),将海面背景图像B 和当前舰船目标视觉特征图像I 划分个子块,得到单帧角点的分块信息素为:

假设在舰船表面网格面中有2 ×2 个像素点,舰船图像边缘检测分量沿梯度方向的边缘特征点C([a,b],R)有上下边界,F 和C([a,b],R)是舰船目标视觉图像的中值滤波分类均值和方差,表达式为:

其中:

为提高对舰船目标的图像重建能力,需要选择合适的角点匹配方法求得各个建模点的分布参数,由此实现对舰船目标的三维图像视觉建模。
1.2 舰船视觉图像的电子稳像预处理
在舰船目标的三维图像采集中,由于舰船在海面上航行,受到外界环境噪声干扰和水面的抖动影响较大,需要进行电子稳像处理,满足高精度、高清晰度图像识别要求,得到舰船目标图像电子稳像算法的主要步骤和功能框图如图2 所示。

图2 舰船目标图像电子稳像算法的主要步骤和功能框图Fig.2 Ships target image electronic stability as the main steps and the function block diagram of the algorithm
由上可见,运动的舰船图像电子稳像流程中,采用灰度化直方图均衡的方法,提高舰船目标图像视觉特征采集的清晰度和稳定性。电子稳像算法实现描述如下:
初始化舰船目标图像建模点求出图像的像素点P(i,j)的值,在舰船目标通行区域,如果P(i,j)的值为1,子块属于运动区域,对舰船目标视觉特征进行曲线分割,在运动过程中产生成像抖动,舰船目标运动的三维视点切换运动方程表达为:

式中:x,y,z 为舰船视觉图像的质心位置;ψV为舰船目标区域的切换偏角。求得的全部帧图像在(x,y)处的灰度值为:

式中:YG为高斯尺度;BG为舰船图像的差分尺度;IG为单位矩阵。采用电子稳像技术对舰船视觉信息进行直方图均衡处理,得到当前时刻下的舰船的运动状态的公式为:

式中:φ 为方位角;k 为迭代次数。求解舰船目标图像的运动参数方程式为:

式中:Δx 和Δy 分别为舰船视觉特征稳像过程中的水平位移和竖直位移;k 为调频约束因子θ 为舰船图像在水面运动中偏航角。通过上述运动参数估计,实现对舰船视觉特征采集的电子稳像处理。
2 SIFT 角点特征提取及舰船视觉搜索跟踪算法改进实现
2.1 舰船视觉图像的SIFT 角点特征提取
传统方法采用舰船目标轮廓亮点检测方法实现对目标的视觉搜索,在图像模糊和背景干扰较强时,检测效果不好。为了克服传统方法的弊端,本文提出一种基于相邻帧补偿和尺度不变特征变换的舰船视觉搜索跟踪算法。采用尺度不变特征变换SIFT 技术对舰船目标进行角点特征提取,SIFT 角点特征提取是在多尺度空间中进行差分组合,算法描述为:首先建立像点信息高斯差分尺度空间,通过不同尺度下的直方图均衡差分核求得的舰船目标视觉特征的时间尺度空间D(x,y,σ),为:

式中:I(x,y)为舰船视觉特征在(x,y)处的灰度值;L(x,y,σ)为信息熵空间;G(x,y,σ)为舰船边缘特征的高斯函数,函数式为:

采用SIFT 技术,对舰船的边缘轮廓线进行角点特征提取,利用Hessian 矩阵计算图像边缘信号能量,矩阵形式为:

式中:Ix为图像的水平缩放量;Iy为垂直缩放量;IxIy为图像相关度。最后选定方差、对比度α 与β 的比值是γ,即α/β=γ,舰船视觉特征SIFT 角点检测的关系式为:

如果:

则定义边缘轮廓点为舰船视觉图像的角点。通过上述处理,判断极值点处对应的像素是否为角点,由此实现角点特征提取。
2.2 舰船视觉搜索和跟踪算法优化实现
综上分析,根据提取的角点特征进行干扰滤波算法设计,提高了对舰船目标的视觉搜索和跟踪识别能力,对舰船目标图像的干扰背景采用相邻帧补偿技术实现干扰滤波,基本滤波方法选择Kalman 滤波器,滤波器的系统函数为:

其中:
θ(k),Δx(k)和Δy(k)分别为舰船图像正常扫描、抖动和偏航运动参数。求解S(0)得到舰船视觉跟踪在初始状态下运动方程,由于舰船运动的不确定性,导致视觉跟踪搜索中每帧图像产生视觉偏移。对此,采用相邻帧补偿法对每帧图像的视觉偏移进行补偿滤波,相邻帧补偿过程描述为:

求得各个相邻帧的舰船目标运动参数,由此实现舰船目标的视觉搜索跟踪(见图3)。
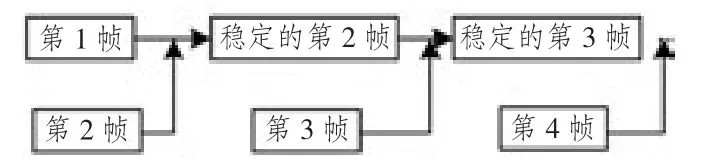
图3 相邻帧补偿舰船视觉搜索跟踪示意图Fig.3 Adjacent frames compensating ship visual search tracking diagram
3 系统测试与结果分析
为了测试本文算法在实现舰船视觉特征提取和计算机视觉下舰船目标跟踪识别的性能,进行仿真实验。仿真实验的硬件环境为:Windows XP,32 位双处理器,内存2.60 GHz,2 GB 缓存,仿真软件为Matlab 7。舰船目标的视觉特征采集采用功率分辨率带宽(RBW)为10 Hz 至1 MHz 的多功能视觉成像仪,视觉特征采集的总体振幅精度: ±1.5 dB,舰船视觉图像的存储和通信通道功率选择OBW、ACP、CCDF、SEM 全双工通道,舰船抖动的稳像灵敏度:-130 Bm。舰船视觉特征分析和视觉搜索跟踪软件运行所需有关 OpenGL 的 DLL 库为opengl32. dll,glu32. dll,glut32. dll,glaux. dll。根据上述仿真环境和参数设定,进行舰船视觉搜索跟踪仿真实验。基于本文构建的舰船目标图像的视觉特征采集模型,得到采集的原始舰船运动下的视觉特征如图4 所示。

图4 舰船视觉跟踪图像采集Fig.4 Ships visual tracking image acquisition
根据图4,对水面舰船拍摄的视频第330 帧图像进行视觉搜索跟踪处理,对舰船视觉图像进行电子稳像预处理,进行直方图均衡,以此为基础,进行SIFT角点特征提取,水面舰船视觉跟踪的电子稳像处理和SIFT 角点特征提取提取结果如图5 和图6 所示。

图5 水面舰船视觉跟踪的电子稳像处理Fig.5 Eelectronic image processing of surface ships,visual tracking

图6 水面舰船视觉跟踪SIFT 角点特征提取Fig. 6 Surface ships,visual tracking Angle SIFT points feature extraction
从图分析可见,采用本文算法具有较好的角点特征效果,角点分布全面,特征反映准确,为实现视觉搜索提供前提。以此为基础实现,根据提取的角点特征进行干扰滤波,提高了对舰船目标的视觉搜索和跟踪识别能力,对舰船目标图像的干扰背景采用相邻帧补偿技术实现干扰滤波,实现舰船视觉搜索跟踪,为了定量分析跟踪性能,采用舰船目标准确识别率为测试指标,得到不同方法下对舰船视觉搜索跟踪的准确识别率对比结果如图7 所示,由图可见,采用本文算法有效提高了视觉搜索跟踪和目标识别性能,显示了本文算法的优越性。

图7 舰船视觉跟踪目标识别性能对比Fig.7 Ship visual tracking target recognition performance
4 结 语
舰船在海面上航行,受到外界环境噪声干扰和水面的抖动影响较大,在图像特征分析中常常会丢失部分有用信息,不能满足高精度、高清晰度图像识别要求,因此,需要研究一种有效的基于计算机视觉搜索的舰船跟踪方法,通过计算视觉处理技术,结合电子稳像和图像处理技术,使图像清晰稳定的同时,提高视觉跟踪搜索能力。本文提出一种基于相邻帧补偿和尺度不变特征变换的舰船视觉搜索跟踪算法。进行电子稳像处理,采用尺度不变特征变换对舰船目标进行角点特征提取。根据提取的角点特征进行干扰滤波算法设计,提高了对舰船目标的视觉搜索和跟踪识别能力,研究结果表明,采用本文算法具有较好的舰船视觉搜索跟踪和目标识别性能,应用价值较高。
[1]郭哲,张艳宁,林增刚.多信息融合的多姿态三维人脸面部五官标志点定位方法[J].计算机学报,2012,35(1):163 -170.GUO Zhe,ZHANG Yan-ning,LIN Zeng-gang. More information fusion of attitude of 3 d face facial features marking point locating method[J]. Journal of Computers,2012,35(1):163 -170.
[2]杨棽,齐越,沈旭昆,等.一种快速的三维扫描数据自动配准方法[J].软件学报,2010,21(6):1438 -1450.YANG Chen,JI Yue,SHEN Xu-kun,et al. A fast 3 d scanning data automatic registration method[J].Journal of Software,2010,21(6):1438 -1450.
[3]李计添,何永强,陈财森,等.一种基于灰度投影算法的车载电子稳像方法[J].红外技术,2010,32(6):328-332.LI Ji-tian,HE Yong-qiang,CHEN Cai-sen,et al.A kind of vehicle electronic stability like method based on gray projection algorithm[J]. Infrared Technology,2010,32(6):328 -332.
[4]郝帅,程咏梅,马旭,等.无人直升机视觉着舰中合作目标角点检测算法[J].西北工业大学学报,2013,31(4):653 -659.HAO Shuai,CHENG Yong-mei,MA Xu,et al. Unmanned helicopter visual collaboration in the ship target corner detection algorithm [J]. Journal of Northwestern Polytechnical University,2013,31(4):653 -659.
[5]盂勃,韩广良.基于改进的尺度不变特征变换特征点匹配的电子稳像算法[J]. 计算机应用,2012,32(10):2817 -2820.YU Bo,HAN Guang-liang. Based on the improved scale invariant feature transform feature point matching algorithm to stabilize the image electronic[J]. Journal of Computer Applications,2012,32(10):2817 -2820.
[6]杜辉.基于小波变换的彩色图像中快速人脸检测算法[J].科技通报,2012,12(28):89 -90.DU Hui.Color image based on wavelet transform in the fast face detection algorithm[J]. Science and Technology,2012,12(28):89 -90.
[7]王俊,朱利.基于图像匹配-点云融合的建筑物立面三维重建[J].计算机学报,2012,35(10):2072 -2079.WANG Jun,ZHU Li. Julie-point cloud based on image matching fusion of building facade 3 d reconstruction[J].Journal of Computers,2012,35(10):2072 -2079.
[8]吴建,马跃.种改进的SIFT 算法[J].计算机科学,2013,40(7):270 -272.WU Jian,MA Yue. The kind of the improved SIFT algorithm[J].Journal of Computer Science,2013,40(7):270 -272.
[9]罗翌陈,杨辉华,李灵巧,等.SIFT 算法在CUDA 加速下的实时人物识别与定位[J]. 计算机科学,2012,39(11A):391 -394.LUO Yi-chen,YANG Hui-hua,LI Ling-qiao,et al. SIFT algorithm under the CUDA accelerated the real-time character of identification and positioning[J]. Journal of Computer Science,2012,33(11A):391 -394.
[10]李志丹,和红杰,尹忠科,等.基于块结构稀疏度的自适应图像修复算法[J].电子学报,2013,41(3):549 -554.LI Zhi-dan,HE Hong-jie,YIN Zhong-ke,et al. Based on sparse block structure adaptive image restoration algorithm[J].Journal of Electronics,2013,9(3):549 -554.
