船舶动力装置的可靠性检测数学建模仿真
2015-12-20张勇飞
张勇飞,李 凤
(南昌大学 科学技术学院,江西 南昌330029)
0 引 言
船舶动力装置是船舶动力中枢的心脏,能够给船舶提供各种形式的能量[1-2]。船舶动力装置的状态和船舶的安全性息息相关,所以,动力装置的可靠性管理对于船舶的安全性非常关键,对其研究也具有重要意义[3-5]。
在对船舶动力装置进行可靠性检测仿真分析的过程中,很难兼顾实时性和精度[6-7],导致传统的可靠性检测分析方法,由于重点分析实时性低,无法保证其精度,不能有效实现大型船舶动力装置的可靠性检测分析[8-10]。
针对传统方法的弊端,提出基于模糊决策及集对分析的船舶动力装置可靠性检测分析方法,假设船舶动力装置中共存在若干传感器对动力转置的故障进行检测,确定隶属度函数,给出隶属度函数的详细数值。通过隶属度矩阵对所有传感器中各决策判断的可信度进行描述。依据最大隶属原则、阈值原则等完成模糊判断。在增强综合检测精度的前提下,采用最大隶属原则和阈值原则相结合的方法完成故障检测。将影响大型船舶动力装置的可靠性因素作为评价指标,评价指标及评价标准作为2 个集合,并构成一个集对,在此基础上对大型船舶动力装置的可靠性进行检测分析。仿真实验结果表明,改进方法具有很高的检测精度。
1 船舶动力装置的可靠性检测原理
1.1 船舶动力装置可靠性的特征值
可靠性是船舶动力装置耐用性与可靠性的综合体现,是船舶动力转置的固有特性之一。保证船舶动力装置的可靠性是设计及制造大型船舶的关键。在船舶运行过程中,其可靠性将随时间的增加逐渐降低,因此,需通过可靠性理论进行检测分析,同时完成概率统计。
可靠性的定义仅为一个定性的概念,在对大型船舶动力装置可靠性问题进行检测分析的过程中,还需要定量的指标。船舶动力装置的可靠性用概率描述时,被称作可靠度,用R(t)进行描述。可靠性可利用其特征值进行定量描述。船舶动力装置可靠性的特征值主要包括故障概率Q(t)、完好概率R(t)、故障时刻的概率密度f(t)以及故障率λ(t)。
故障概率可通过分布函数Q(t)=P(tA≤t)进行描述,船舶动力装置的1 台机及1 个组件等的故障时刻tA为随机量。针对一个被检测大型船舶动力装置单元的状态,仅存在2 种偶然事件,即故障与完好。所以,故障概率与完好概率为互补概率,也就是Q(t)+R(t)=1;而船舶动力装置的可靠性一般可通过完好概率R(t)进行描述,也就是R(t)=P,(tA≤t),与之对应的分布函数可描述成R(t)= 1 -Q(t)。Q(t)即为区间(0,t)内大型船舶动力装置故障的概率,R(t)用于描述在时刻t 后的故障概率。
船舶动力装置的故障时间t 为一个连续的随机变量,其概率密度f(t)可通过式(1)求出:

大型船舶动力装置故障状态的另一个关键特征值为故障概率λ(t),可通过下式求出:

1.2 船舶动力装置可靠性的检测分析
假设船舶动力装置发生故障是事件A,N(t)用于描述到某一时刻t 为止已发生的事件A 的次数,则事件A 的次数N(t)是一个随机变量,称随机过程{N(t),t ≥0}是计数过程。
在实际应用中,船舶动力装置出现故障的次数一定大于或等于0,同时均为正整数值。在时间t =0 时,船舶动力装置出现故障的次数N(0)= 0,同时,随着时间t 的逐渐增加,船舶动力装置的故障次数N(t)也逐渐增加,也就是当时间s < t 时,N(s)<N(t),N(t)- N(s)即为区间[s,t]内出现事件A 的次数。
上述过程{N(t),t ≥0}在不相重叠的时间间隔中,事件A 出现的次数相互独立,也就是当t1<t2≤t3<t4,则在[t1,t2]区间内事件A 出现的次数N(t2)- N(t1)和在[t3,t4]区间内事件A 出现的次数N(t4)-N(t3)相互独立,其只取决于时间差,和任意时刻t 无关。当前,上述过程{N(t),t ≥0}为平稳独立增量过程,因此计数过程{N(t),t ≥0}可利用泊松过程来体现。
依据泊松过程的定义,在某长度是t 的区间内,事件A 出现的次数服从参数λ >0 的泊松分布,也就是对任意时刻s,同时t ≥0,有:

当n = 0 时,也就是在时间长度是t 时,事件A出现的次数是0,则有:

因此,船舶动力装置完好的概率

则船舶动力装置的平均寿命TL可描述成:

依据泊松定理,若{N(t),t ≥0}为具有λ >0的泊松分布,{Tn,n ≥1}为相应的时间间隔序列,则随机变量Tn(n = 1,2,…)为独立分布的均值是1/λ 的指数分布,则:

2 基于模糊决策及集对分析的船舶动力装置可靠性检测分析
2.1 船舶动力装置的故障检测
假设船舶动力装置中共存在m 个传感器对动力装置的n 个故障进行检测时,检测结果xm的数量为m × n 个,动力装置可能的决策yi共n 个,A={y1,y2,…,yn},B={x1,x2,…,xm}。
在船舶动力装置中,各传感器的检测结果即为决策集上每个等级可信度度量。假设传感器i 对动力装置故障检测的结果是ri=(μi1,μi2,…,uin),其中μij∈[0,1],1 ≤j ≤n,对其进行归一化处理,即可获取其对融合中心的输入:ri=(μi1,μi2,…,μin)。则由m 个传感器组成的m ×n 的模糊关系矩阵可描述成:
模糊关系矩阵RA×B中每个元素的取值和实际应用的相符程度直接影响船舶动力装置故障检测的结果,影响其可靠性检测结果。所以,确定隶属度函数为故障检测的关键,同时给出隶属度函数的详细数值μij。
对船舶动力装置的所有传感器来说,其作用程度不一样,所有传感器对各决策判断的可信度用隶属度矩阵X 进行描述:
则模糊运算检测结果Y 可描述成:
为了分析全部指标的影响,同时保存所有的信息,上述公式中的模糊算子°可通过模型M(·,⊕)求出。
将上式中的对角线元素看作是模糊信息融合结果,则有:
1)假设阈值α ∈[0,1],y0=maxykk(k = 1,2,…,n),如果y0<α,则拒绝检测,即给出的故障信息不足;如果y0>α,则依据最大隶属度原则判断大型船舶动力装置是否存在故障。
2)故障隶属度和其他隶属度之差需超过某阈值γ,也就是y0- ykk>γ(k = 1,2,…,n)求出。
2.2 船舶动力装置可靠性的集对检测分析评价
将影响船舶动力装置可靠性因素作为评价指标,评价指标及其评价标准作为2 个集合,并构成一个集对,在此基础上对船舶动力装置的可靠性进行检测分析。
2.2.1 集对分析原理
集对分析法的基本概念为集对和联系度。集对是由具有一定联系的集合A 与集合B 构成的对子集合H(A,B)。联系度即2 个集合对其共有属性的相同、相异、相反程度。集对分析法即分析上述2 个集合的联系度。联系度通常可描述如下:

式中:μ 用于描述联系度;N 用于描述集合(A,B)的特征总量;S 用于描述集合(A,B)中共同存在的特征总数;P 用于描述集合(A,B)中互相对立的特征数量;F 用于描述集合(A,B)中即不共同存在,也不对立的特征数量;a 用于描述2 个集合的同一程度,称作同一度,a = S/N;b 用于描述2 个集合的不同程度;c 用于描述2 个集合的对立程度。
2.2.2 船舶动力装置可靠性的评价标准
假设选择m 种影响船舶动力装置可靠性的因素指标将可靠性评价划分成k 个等级,通常情况下,k取奇数,本文中k 取5。将船舶动力装置的可靠性检测分析样本中某指标值xk(l = 1,2,…,m)看作是一个集合Al,将评价标准看作是另一个集合Bk(k =1,2,…,5),则其可组成一个集对H(Al,Bk)。通过五元联系度μl对其之间的关系进行描述:

式中:al为指标值xl和该指标第1 级标准的同一度;为指标值xl和第1 级标准相差1 级的差异度;为指标值xl和第1 级标准相差2 级的差异度;为指标值xl和第1 级标准相差3 级的差异度;cl为指标值xl和该指标第1 级标准的对立度。
由于各因素指标对船舶动力装置的影响程度不同,因此,可将表达式(12)描述成:
式中ωl为指标xl的权重。
2.2.3 联系度的计算
将船舶动力装置的可靠性标准划分成五级,评价样本指标值xl(l = 1,2,…,m)和评价指标标准的联系度μl可通过下式求出:
式中,s1,s2,s3,s4,s5分别为评价标准1 ~5 级的标准值;xl(l = 1,2,…,m)为评价指标统计值。
3 仿真实验分析
为了验证改进方法的有效性,需要进行相关的实验分析。实验分析的仿真模型是依据第五代大型船舶的动力装置系统所创建。柴油机型号是MAN B&W 10L90MC。在实验船舶动力装置中,柴油机以及螺旋桨的关键技术参数如表1 和表2所示。
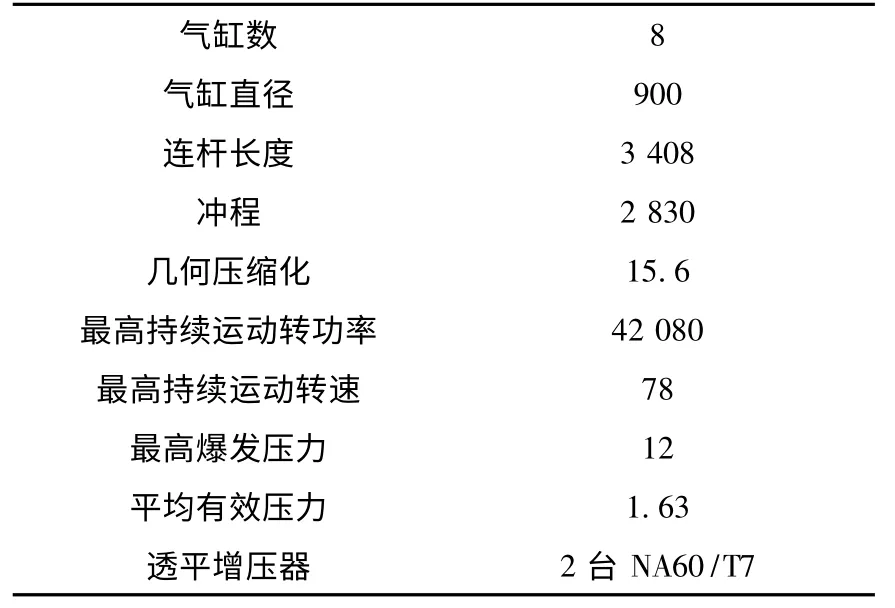
表1 MAN B&W 10L90MC 关键技术参数Tab.1 MAN B&W 10 l90MC key technical parameters

表2 船体以及螺旋桨参数Tab.2 Hull and propeller parameters
在仿真软件开发中,通过VC ++提供的精确定时函数Qurery Performance Frequency ()和Query PerformanceCounter ()塑造了1 ms 的精确定时器,该定时器可对总体大型动力装置的数学模型进行求算。
在分析传统方法以及改进方法的可靠性检测过程中,根据船舶试航实测的负荷数据资料,实验分别采用传统方法以及改进方法对40.3%,63.8%,66.5%,88.2%以及98.5% 负荷对实验大型船舶运行过程中柴油机的柴油机转速、扫气压力以及油门刻度3 个指标进行仿真运算,并同现实检测数据进行比较分析,结果分别如图1 和图2 所示。
分析图1 和图2 可得,在不同负荷条件下,传统方法以及改进方法下的仿真数据同船舶运行时检测的数据误差分别是7.6%以及2%,改进方法下的仿真数据同检测数据具有较高的匹配度。说明相对于传统方法,改进方法进行的船舶可靠性检测具有较高的精度。
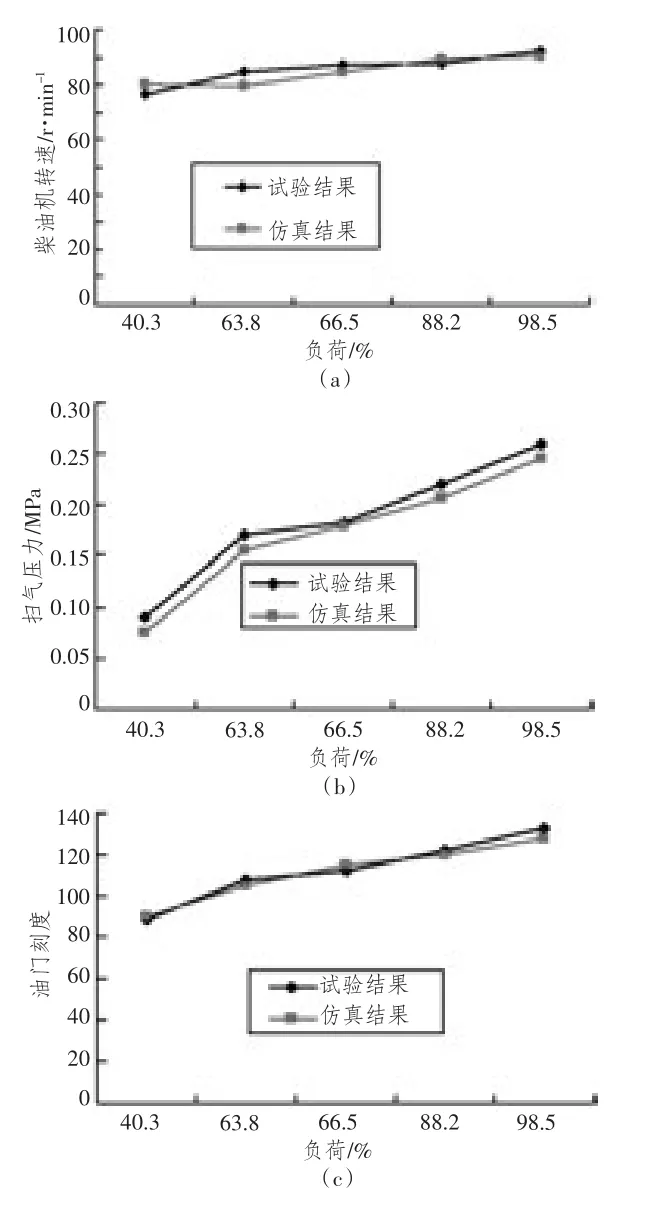
图1 传统方法柴油机可靠性仿真和检测数据对比Fig.1 The traditional method of diesel engine reliability simulation and comparison of testing data
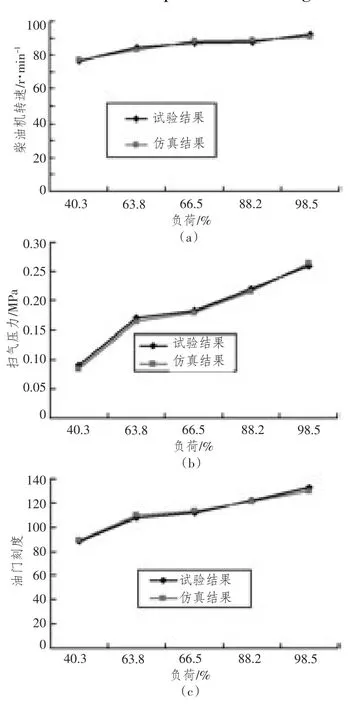
图2 改进方法柴油机可靠性仿真和检测数据对比Fig.2 Diesel engine reliability improvement method of simulation and testing data
4 结 语
提出基于模糊决策及集对分析的船舶动力装置可靠性检测分析方法,假设船舶动力装置中共存在若干传感器对动力装置的故障进行检测,确定隶属度函数,给出隶属度函数的详细数值。通过隶属度矩阵对所有传感器中各决策判断的可信度进行描述。依据最大隶属原则、阈值原则等完成模糊判断。在增强综合检测精度的前提下,采用最大隶属原则和阈值原则相结合的方法来完成故障检测。将影响船舶动力装置的可靠性因素作为评价指标,评价指标及其评价标准作为2 个集合,并构成一个集对,在此基础上对大型船舶动力装置的可靠性进行检测分析。仿真实验结果表明,改进方法具有很高的检测精度。
[1]张志镇,高峰,许爱斌,等.冲击地压危险性的集对分析评价模型[J].中国矿业大学学报,2011,5(3):379-384.
[2]朱明,孙健,杨娟.船舶动力装置节能减排技术及应用现状[J].中国科技博览,2014(20):114 -114.
[3]朱泉,徐晓栋,龚玉玲,等.船舶主锅炉燃油压差调节器的联合仿真分析[J].珠江水运,2014(14):47 -48.
[4]蒋小利,江志刚,张华,等.基于ADAMS 的液压挖掘机工作装置动力学仿真分析[J].现代制造工程,2014(11):74 -77.
[5]李振男.基于模糊可靠性故障树分析船用齿轮箱的失效型式[J].中国高新技术企业,2014(16):9 -10.
[6]刘峰,王学雷,郭希娟,等.基于ANSYS 和ADAMS 的自动倾斜器柔性动平台动力学仿真分析[J].现代制造工程,2014(11):10 -14.
[7]丁福光,朱增帅,王奇.基于BP 网络的船舶动力定位控制技术仿真研究[J].计算机仿真,2014,31(10):405-409.
[8]陈继芹,戴劲松,王茂森,等.某无链供弹装置的仿真与试验[J].兵工自动化,2014(10):49 -51.
[9]张光辉,浦金云,苏小博,等.船舶甲板火灾风场模拟装置流场计算与设计[J].消防科学与技术,2014(9):1002 -1004.
[10]何涛,李玩幽,卢熙群,等.船舶尾轴承混合润滑性能仿真分析[J].船舶力学,2014(8):973 -981.
