基于专家系统的机场货运站双ETV任务调度研究
2015-12-19兰州交通大学机电技术研究所甘肃兰州730070
雷 斌 (兰州交通大学 机电技术研究所,甘肃 兰州730070)
LEI Bin (Mechanical and Electrial Technology Institute, Lanzhou Jiaotong University, Lanzhou 730070, China)
近年来,随着航空货运需求的快速发展,国内大型机场都相继建设了自动化的货运站。大型自动化立体仓储系统是机场货运站的主要设施,用于航空货运集装设备(Unit Load Device, ULD) 的存放和输送。升降式转运车(Elevating Transfer Vehicle,ETV) 是输送和存储ULD 的主要设备,作用和自动化立体仓库中堆垛机类似。由于机场货运站作业要求高效、低故障的要求,一般大型的机场货运站自动化立体仓储系统都配备两台或两台以上的ETV。机场货运站双ETV 任务调度具有一般自动化立体仓库任务优化调度的共性特征,同时具有其自身的特点。所谓“双ETV”是指在同一个巷道内,有两台ETV 共同完成货物堆垛输送任务。两台ETV 互为备份,相互配合。近年来,自动化立体仓库作业优化调度问题得到了广泛深入的研究,所采用的方法包括模拟退火、遗传算法、神经网络、Petri 网等[1-3]。文献[4]、[5]运用专家系统,对常见的自动化立体仓库作业调度和货位分配原则进行了分析研究。文献[6]、[7]对机场货运站的任务调度进行了分析研究。对于机场货运站双ETV 任务调度的研究,很少有文献涉及。专家系统是一种在相关领域中具有专家水平解题能力的智能程序系统,它能应用专家多年积累的经验与专门知识,模拟人类专家的思维过程,求解需要专家才能解决的困难问题。本文运用基于规则的专家系统的方法,对机场货运站双ETV 任务调度进行了分析归纳,建立了专家系统的知识库和推理机制,通过算例,验证了专家系统能够较好地提高机场货运站双ETV 任务执行的效率。
1 机场货运站的主要设备及任务
机场货运站的主要设备包括输送系统、ETV、货架等部分,一般布局平面图如图1 所示。其中输送系统负责将ULD 输送至ETV 与输送系统交接台,输送系统包括机场货运站陆侧输送系统和空侧输送系统。
机场货运站的任务包括入库、出库、直通、倒库和盘库等。入库是将待出发的或到达的ULD 暂时存储到货架上的作业。出库是将货架上的ULD 下架后,输送到空侧准备发运,或输送到陆侧拆解。直通是将ULD 直接由陆侧输送到空侧发运或直接由空侧输送到陆侧拆解。倒库是在ETV 没有出入库、直通和盘库任务时,将ULD 尽量搬运到离出口近的位置存放,或将一个航空公司的ULD 集中存放。
2 双ETV 任务调度专家系统的建立
2.1 双ETV 任务调度专家系统基本构成
一般的专家系统有6 个组成部分:输入部分、知识库、推理子系统、综合数据库、解释子系统和知识获取系统。如图2 所示。
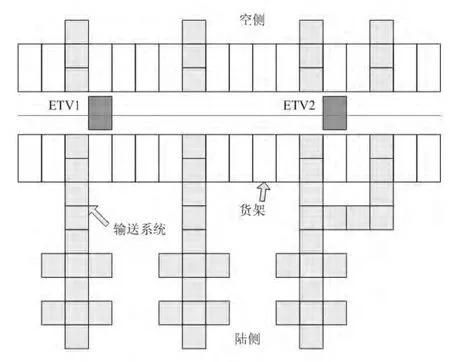
图1 机场货运站平面布局图
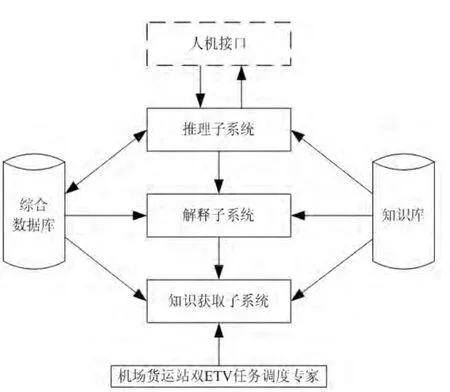
图2 双ETV 任务调度专家系统的结构
知识库存储从专家那里得到的关于机场货运站双ETV 任务调度的专门知识;推理子系统具有依据一定调度策略进行推理的能力,即能够依据知识库推导出结论而不是简单地去搜索现成的答案;综合数据库用于存放系统运行过程中所需要和产生的所有信息,包括问题的描述、中间结果、解题过程的记录等信息;解释子系统负责回答用户提出的各种问题;知识获取子系统负责管理知识库中的知识,包括根据需要修改、删去或添加知识及由此引起的一切必要的改动,维持知识库的一致性、完整性等。
2.2 双ETV 任务调度专家系统知识库的建立
机场货运站双ETV 任务调度主要是作业任务调度,即将众多待执行的任务进行排序。重点解决两台ETV 协调工作,达到效率最高。知识库就是在作业调度原则的基础上建立的。
2.2.1 作业调度原则
(1) 先到先服务原则:这是作业调度的基本原则之一,不考虑任务类型和优先级等因素,先到的任务申请先处理。这种原理适用于同类任务或优先权对系统影响很小的系统。
(2) 优先权原则:将任务赋予优先权,在处理任务时,按优先级的高低排序,优先响应优先权最高的任务。
(3) 联合作业原则:在有多项出库和入库任务时,适当把出库任务和入库任务进行优化组合,满足条件的出库任务和入库任务组合成联合作业,可缩短存取周期,提高存取效率。
(4) 双板作业原则:ETV 能够同时输送两个5 英尺的集装箱,在执行双板作业时,要保证两个作业不能冲突,而且要求不能增加ETV 作业时间。
(5) 两台ETV 避让原则:如果ETV 在执行任务时,另一台ETV 停在本台ETV 执行任务的路径上,就需要另一台ETV 先执行避让移动操作。在两台ETV 任务分配时,尽量减少执行避让操作时间。
(6) 出入库作业按比例分配原则:对于ETV 任务同时有入库和出库作业时,可以按比例分配任务,保证出入库作业按需求动态调整。
(7) 倒库原则:ETV 没有出入库、盘库、直通等作业时,可以执行倒库操作,倒库的原则是将货物尽量移到离ETV 与输送系统交接台比较近的位置。
2.2.2 作业调度说明
本文设计的机场货运站双ETV 任务调度方法将整个巷道划分为两个区域,每台ETV 主要负责处理一个区域的任务。当作业任务集中在一个区域内或一台ETV 不在全自动模式时,自动调整ETV 的工作区域。对于5 英尺的小箱,ETV 一次可以取两个(即双板作业),在任务调度过程中,本方法能够实现双板作业。两台ETV 工作过程中,可能会出现作业路径冲突,本方法能够实现ETV 自动避让。
本文设计的调度方法说明:(1) ETV 安全距离:两台ETV 在运行过程中,需要间隔一定的距离,这个距离是ETV 设计时的一个固定参数。(2) 工作区域:根据调度需要,将巷道划分为不同的区域,包括ETV1 主工作区域、ETV2 主工作区域、ETV1 增援工作区域、ETV2 增援工作区域。(3) ETV 工作状态:ETV 的工作状态分为空闲、取上一个货、取上两个货。(4)ETV 任务类型:ETV 任务类型包括避让移动、入库、出库、直通、倒库、盘库,其中盘库任务包括盘库移动、盘库取货、盘库放货3 部分。(5) ETV 出入库作业比例:物流系统货物处理过程中,出库任务一般优先入库任务执行,要求出入库作业按比例执行,比如出入库按1∶3 执行,先执行3 个出库作业,再执行1 个入库作业。根据作业任务情况,出入库作业比例可做调整。直通任务认为是入库任务,倒库和盘库任务不计算在出入库作业比例中。(6) 作业任务优先级:ETV 作业任务生成时,都有一个默认的优先级别。如果有些任务比较紧急时,操作员会调整作业的优先级别,将比较紧急的任务优先级别提高,虽然这些任务可能是后生成的,但任务调度系统会优先将比较紧急的任务分配给ETV 去执行。对于同一优先级别的任务,按照任务生成的先后顺序执行。本文中的优先级是任务优先级别和生成顺序两项指标的综合值,每条任务都有唯一的优先级。
2.2.3 知识库的建立
知识库的建立好坏,直接影响推理机制的速度及效率。本专家系统知识库的建立采用产生式规则表示法(又称规则表示法)。产生式规则的基本形式是:P-Q 或者IF P THEN Q,其含义是:如果前提P 满足,则可推出结论Q 或执行Q 所规定的操作。
根据以上形式和原则,建立机场货运站双ETV 任务调度专家系统的知识库。
知识库中的部分规则表示如下:R1:IF ETV1 模式为全自动,THEN 判断ETV1 的状态,根据ETV1 的状态,给ETV1 分配任务;R2:IF ETV1 状态为空闲,THEN 进入分配任务模块,给ETV1 分配任务;R3:IF ETV1 状态为取上一个货,THEN 进入判断执行双板作业模块,判断能否执行双板作业;R4:IF ETV1 状态为取上两个货,THEN 进入判断先放哪个货模块,判断先哪个货;R5:IF ETV1 有移动避让任务,THEN 判断能否通过执行一条出入库任务达到避让目的;R6:IF ETV1 能够通过执行一条出入库任务达到避让目的,THEN 删除移动避让任务,执行出入库任务;R7:IF ETV1 不能通过执行一条出入库任务达到避让目的,THEN 执行移动避让任务;R8:IF ETV1 没有移动避让任务,THEN 分配其他任务;R9:IF ETV1 有盘库任务,THEN 判段执行盘库任务是否需要ETV2 避让;R10:IF ETV1 执行盘库任务需要ETV2 避让,THEN 给ETV2 生成一条避让任务;R11:IF ETV1 执行盘库任务不需要ETV2 避让,THEN ETV1 执行盘库任务;R12:IF ETV1 没有盘库任务,THEN 确定ETV1 执行任务的区域;
……
ETV2 任务调度方法和ETV1 类似,系统轮流对ETV1 和ETV2 的任务进行调度。
2.3 推理机制的选择
推理子系统负责整个专家系统的运行,实现机场货运站双ETV 任务的调度。其主要工作是:按一定的策略从知识库中选择规则前提与综合数据库中的已知事实进行匹配。如果前提与综合数据库的某条信息一致,则认为匹配成功,将结论加入到综合数据库,或执行前提所得的操作。其正向推理流程框图如图3 所示,其工作过程是:先将基本信息输入综合数据库,即将综合数据库初始化,然后从规则库中取出第一条规则R1,检查其前提是否可与综合数据库中的已知事实匹配。如果事实与R1 前提不匹配,则R1 不参与推理。取出R2 等进行同样的工作,并且一直循环,直到得到最终的结论。
这种求解过程是一个不断地从规则库中选取可用规则与综合数据库中的已有事实进行匹配,规则的每一次匹配成功都使综合数据库增加了新的内容,并朝着问题的求解方向前进了一步。
2.4 任务的执行
一批任务的执行程序示意图如图4 所示。首先根据ETV 的工作状态,确定ETV 执行什么动作,包括取货、取双板、放货等;然后根据任务分布情况和另一台ETV 工作模式,确定任务分配范围和作业类型,任务范围包括主工作区域和增援工作区域,作业类型包括出入库或其它;再根据优先级和任务执行条件,确定执行哪条任务。在整个过程中,任务调度分配通过专家系统中推理机制来确定。
3 算 例
初始化综合数据库。假设ETV1 和ETV2 都为全自动模式,有3 个入库任务,5 个出库任务,2 个倒库任务。ETV 的水平速度为0~120m/min(无级变速),垂直速度为0~20m/min(无级变速),ETV 每执行一次取放操作任务的时间为10s。ETV 任务的相关参数如表1。
假设1~23 列为ETV1 的主工作区域,24~45 列为ETV2 的主工作区域,两台ETV 之间的安全距离为4 列,14~23 列为ETV1 的增援区域,24~32 列为ETV1 的增援区域,ETV1 的初始位置为3 列,ETV2 的初始位置为28 列,ETV1 和ETV2 都无故障,且在全自动模式下,出入库作业比例为1∶3。根据知识库中的规则和推理机制,计算机两台ETV 执行表1 中的10 条任务过程如下:(1) 任务1 的起始位置为2 列,应该由ETV1 来执行,但ETV2 在28 列,必须要求ETV2 先执行移动避让,ETV1才能执行任务1。(2) 任务2 的起始位置为6 列,应该由ETV1 来执行,并且不需要ETV2 执行移动避让。(3) 任务3 的起始位置为32 列,应该由ETV2 来执行,并且不需要ETV1 执行移动避让。(4) 因此,ETV1 执行任务2,同时ETV2 执行任务3。(5) ETV1 执行完任务2 后,由于按出入库作业比例执行任务,ETV1 执行任务6。由于任务6 和任务7 满足双板作业条件,ETV1 执行双板作业,两条任务合计用时2 分钟。(6) ETV2 执行完任务3 后,执行任务8。(7) ETV1 执行完任务6 和7后,执行任务1。(8) ETV2 执行完任务8 后,执行任务9。(9) ETV2 执行完任务9 后,执行任务10。(10) ETV1 执行完任务1 后,执行任务4。(11) ETV2 执行完任务10 后,等待ETV1 执行完任务1 后,执行任务5。
ETV1 执行任务花费总时间为8.2 分钟,ETV2 执行任务花费总时间为9.1 分钟,系统花费的总时间为9.1 分钟。
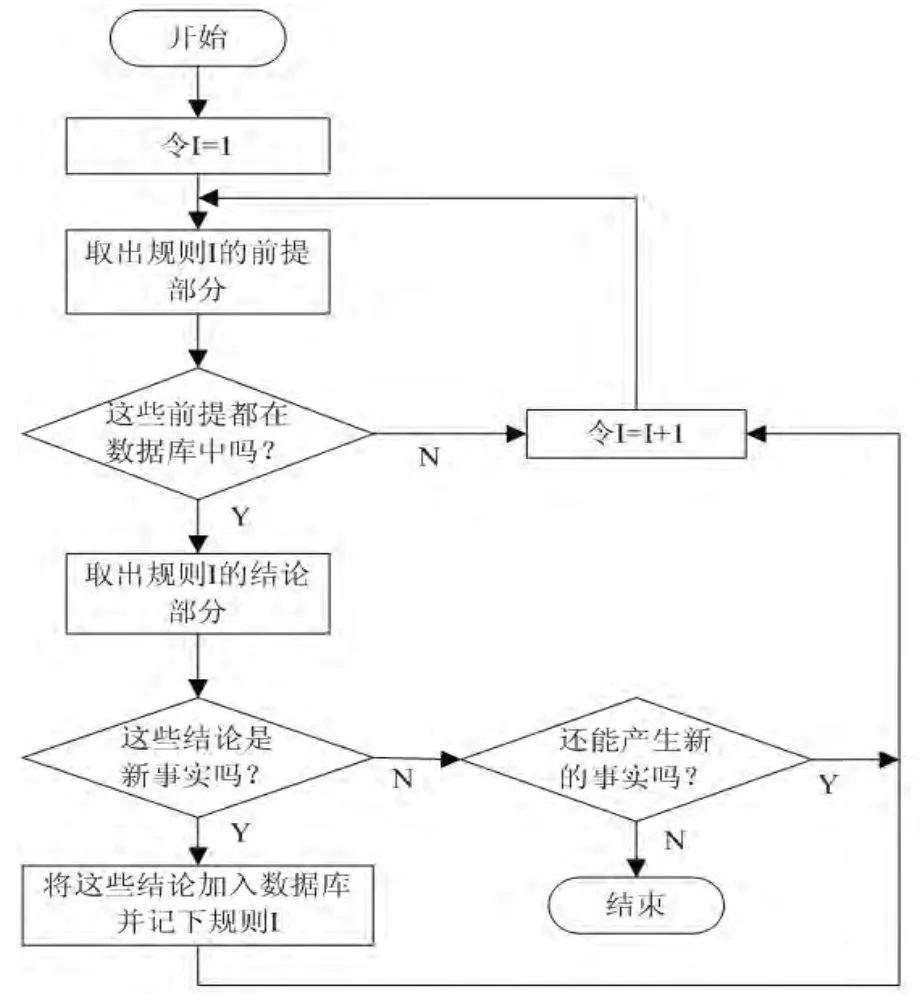
图3 双ETV 任务调度专家系统正向推理框图
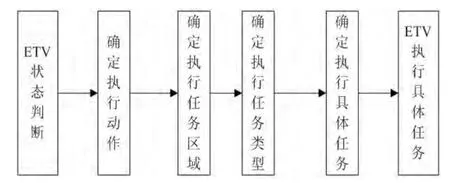
图4 任务执行过程示意图
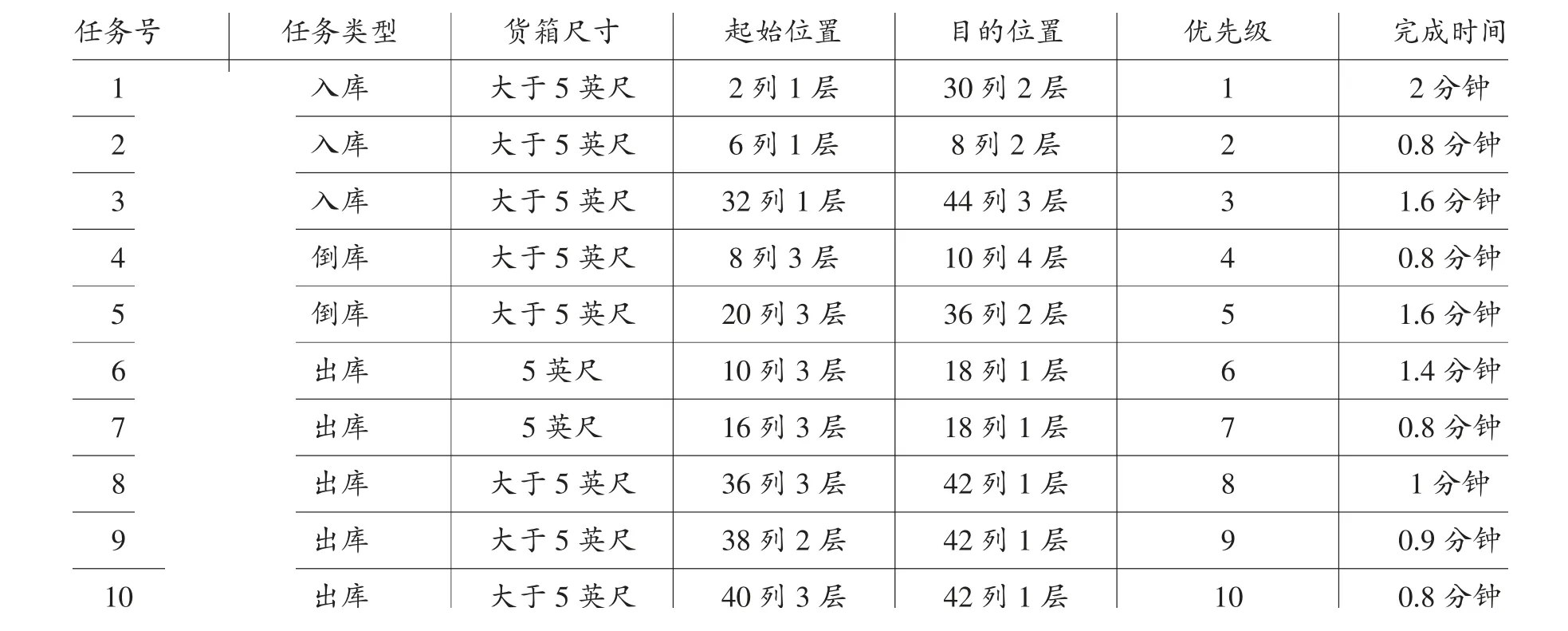
表1 ETV 任务相关参数表
如果不采用本文设计的调度方法,而直接按顺序执行任务ETV1 执行任务花费总时间为10.4 分钟,ETV2 执行任务花费总时间为8.5 分钟,系统花费的总时间为10.4 分钟。因此,采用直接按顺序执行任务的方法,不仅耗时比较长,而且不能满足实际需求。一般情况下,出库任务比较紧急,如果按顺序直接执行任务,任务7 的完成时间远远大于本文所采用的方法的时间。
4 结 论
本文运用基于规则的专家系统的方法,分析了机场货运站双ETV 任务调度问题,建立了专家系统的知识库和推理机制,编制了算法程序,实现了基于专家系统的机场货运站双ETV 任务调度。通过算例结果分析对比,表明基于专家系统的机场货运站双ETV 任务调度方法能够较好地解决复杂的任务调度,较好地提高系统的作业效率。
[1] 常发亮,刘增晓,辛征,等. 自动化立体仓库拣选作业路径优化问题研究[J]. 系统工程理论与实践,2007,27(2):139-143.
[2] 李梅娟,陈雪波. Pareto 遗传算法在货位配置中的应用研究[J]. 控制工程,2006,13(2):138-140,144.
[3] 柳赛男,柯映林,李江雄,等. 基于调度策略的自动化仓库系统优化问题研究[J]. 计算机集成制造系统,2006,12(9):1438-1443.
[4] 徐香玲,傅卫平,李德信,等. 基于专家系统的自动化立体仓库出入库调度研究[J]. 物流技术,2005(2):38-40,51.
[5] 曾明如,游文堂,钱信,等. 基于专家系统的货位管理与作业调度优化[J]. 南昌大学学报(工科版),2009,31(4):385-388.
[6] 张云霞. 机场货运站监控系统多任务调度策略的研究与仿真[D]. 兰州:兰州交通大学(硕士学位论文),2011.
[7] 赵亮,宋宇博,蒋兆远. BP 神经网络在机场货运站生产调度中的应用[J]. 起重运输机械,2009(11):39-42.