基于Matlab的特种机器人力控制仿真研究
2015-12-17强李康举
张 强李康举,赵 元
(1.沈阳理工大学 机械学院,沈阳 110168;2.沈阳工学院,抚顺 113122)
基于Matlab的特种机器人力控制仿真研究
张 强1李康举1,2赵 元2
(1.沈阳理工大学 机械学院,沈阳 110168;2.沈阳工学院,抚顺 113122)
针对五自由度特种机器人在目标捕获过程中的应用,为提高机器人末端执行器的位置精度,本文采用阻抗控制研究方法对特种机器人进行力控制研究。基于MATLAB/Simulink建立阻抗控制仿真模型,进行仿真验证。仿真结果表明,采用阻抗控制方法可以补偿机器人手臂位置控制的误差,从而保证机器人手臂对目标的捕获精度。
特种机器人 位置精度 力控制 阻抗控制
引言
空间机器人手臂是一个复杂的串联系统,各关节、连杆在运动过程中存在相互藕合的动力学影响。机器人手臂的控制技术主要解决机器人手臂的多体协调控制,保证空间机器人手臂在任务阶段运动的平稳性及接触操作的准确性和安全性。由于机器人手臂自由运动的定位精度有限,需加入相应的力学反馈信号作进一步精确控制,从而提高操作精度。
从机器人实现依从运动的特点来看,一般可归结为四大类:阻抗控制、力/位混合控制、自适应控制和智能控制。本文将采用阻抗控制方法对特种机器人进行力控制研究。阻抗控制的特点是不直接对机器人与环境的作用力进行控制,而是根据机器人末端的作用力和位置(或速度)之间的关系,通过调整反馈位置误差、刚度或速度误差来达到控制力的目的,此时,接触过程的弹性变形尤为重要,因此,狭义地称为柔顺性控制。这类力控制主要基于位置和速度两种基本形式。当把力反馈信号转换成位置调整量时,这种力控制叫做刚度控制;当把力反馈信号转换成速度修正量时,这种力控制叫做阻尼控制;当把力反馈信号同时转换为速度和位置的修正量时,叫做阻抗控制[1]。
1 特种机器人结构及仿真模型
五自由度特种机器人由五个旋转关节组成,分别为腰部旋转关节,大臂旋转关节,前臂旋转关节,小臂旋转关节和手腕旋转关节。其结构模型如图1所示。
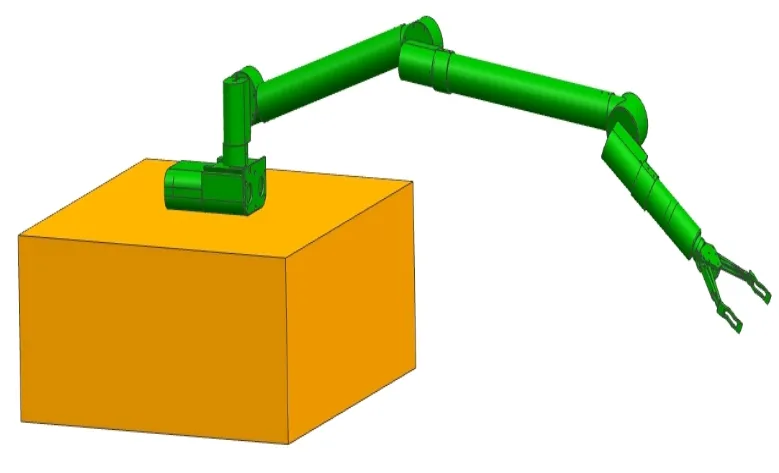
图1 5-DOC特种机器人
其中,大臂旋转关节,前臂旋转关节,小臂旋转关节在同一平面内运动,其运动具有连续性、相关性等(即关节2,3,4)。本文将五自由度特种机器人简化为三自由度机构,了解其动力特性,并在此状态下进行动力学分析及仿真研究[2]。

图2 平面三自由度机械臂
如图2所示,关节C处的坐标xcyc的几何关系为:

由式(1)可求出雅可比矩阵为:

采用拉格朗日方法建立该平面机器人动力学方程为式(2):

其中,D(q)为正定的惯性矩阵;H(q,q.)为离心力和科氏力矢量;G(q)为重力矢量,q为关节位置;τ为关节驱动力矩;J为雅可比矩阵,F为手臂末端受到的外力[3-4]。
机器人的阻抗控制可用式(3)表示:

式(3)中,M,B,K分别为机械手目标惯性矩阵、阻尼矩阵、刚度矩阵,dX=Xd-X表示手臂目标位置和当前位置的位移。
为实现上述目标控制,采用如式(4)的控制规律[5-7]:

阻抗控制算法控制结构图如图3所示。
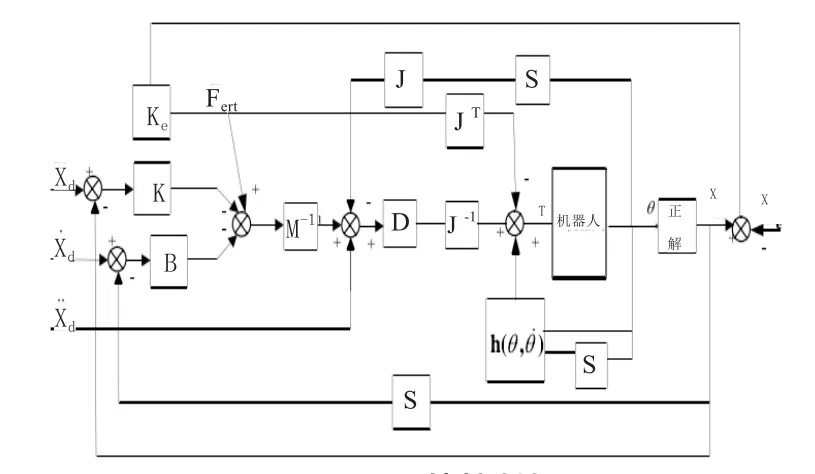
图3 阻抗控制框图
2 Matlab/Simulink仿真模型
机器人手臂在接触到物体前为自由运动空间,此时,手臂末端与环境接触力F=0,阻抗参数选取为:目标惯性矩阵:M=I;阻尼矩阵:


图4 阻抗控制框图
机械手末端x方向位置跟踪情况如图5所示。

图5 x方向位置跟踪
机械手末端y方向位置跟踪情况如图6所示。
机械手臂末端的轨迹如图7所示。
3 结语
为保证特种机器人在工作过程中末端执行器的位置精度,本文初步对五自由度特种机器人进行力控制的研究。通过采用对机器人自由度简化和阻抗控制的方法,使特种机器人的末端运动轨迹能有较高精度的跟踪期望轨迹。基于Matlab/Simulink模块,建立该机器人力控制仿真模型,仿真结果表明,本文采用的阻抗控制方法有效补偿了机器人手臂末端的位置误差,从而保证特种机器人手臂对目标的捕获精度。
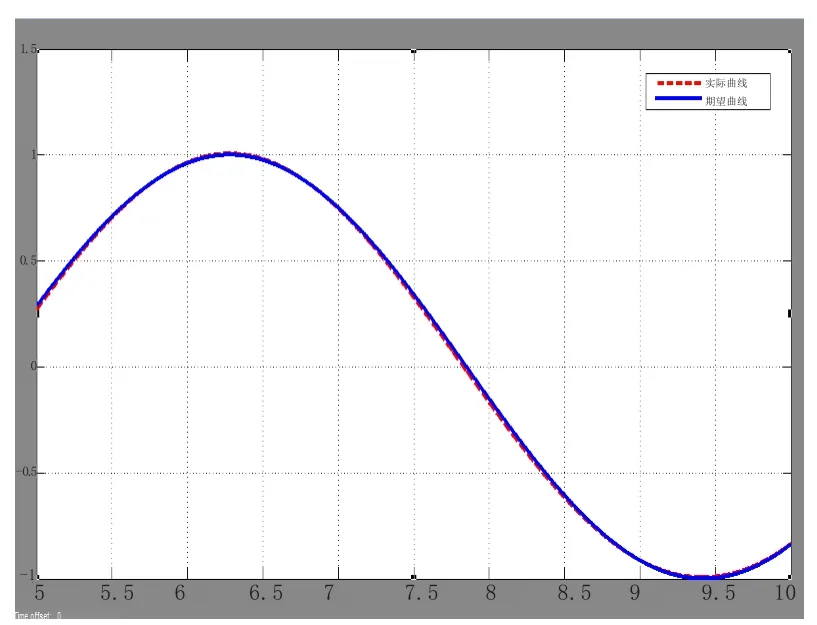
图6 y方向位置跟踪

图7 末端运动轨迹
[1]陈欢龙,王盈,邹怀武,等.基于阻抗控制的空间机械臂目标捕获技术研究[J].载人航,2014,(2):122-126.
[2]张立峰.三自由度水下机械手本体机构及阻抗控制研究[D].南京:东南大学,2008.
[3]熊有伦.机器人技术基础[M].武汉:华中科技大学出版社,1996.
[4]谭海强,熊庆宇,石欣,等.基于Matlab机器人力控制系统仿真研究[J].计算机工程与应用,2014,(12):242-246.
[5]John J.Craig.机器人学导论[M].北京:机械工业出版社,2006.
[6]李二超,李战明,李炜.基于Matlab / Simulink机器人力控制系统仿真研究[J].机床与液压,2011,(9):108-110.
[7]张磊.基于阻抗控制的空间机械臂辅助对接研究[D].哈尔滨:哈尔滨工业大学,2013.
[8]杨振.基于阻抗控制的机器人柔性力控制方法研究[D].南京:东南大学,2008.
[9]张德峰.Matlab/Simulink建模与仿真实例精讲[M].北京:机械工业出版社,2011.
[10]刘金琨.机器人控制系统设计与Matlab仿真[M].北京:清华大学出版社,2008.
[11]薛定宇,陈阳泉.基于Matlab/Simulink的系统仿真技术与应用[M].北京:清华大学出版社,2002.
Simulation Research of Force Control for Special Robots Based on Matlab
ZHANG Qiang1,LI Kangju1.2,ZHAO Yuan2
(1.Shenyang Ligong University, Shenyang 110159;2.ShenyangInstitute of Technology, FuShun 113122)
For the application of 5-DOF spe cial robots i n the target acquisition process, t o improve the position precision of the robot end ac tuator, the article adopt the method of impedance control for special robot force control. The si mulation model of impedance control was es tablished based on Matlab/Simulink,and then the simulation carried on. Simulation results show that impedance control method which the article adopted can compensate the robot arm’s position error, accordingly ensuring the accuracy of the robot arm to capture the target.
special robot, location accuracy, im pedance control