用于红枣收获机的拾捡器设计与研究
2015-12-17马利云田毛提宋要斌张盈盈
马利云 田毛提 宋要斌 张盈盈
(吕梁学院,吕梁 033001)
用于红枣收获机的拾捡器设计与研究
马利云 田毛提 宋要斌 张盈盈
(吕梁学院,吕梁 033001)
在红枣落地收获的过程中,拾捡器作为重要部件,关系到地面枣粒能否快速有效收获。本文设计了能自动完成拾捡任务的拾捡系统,该系统主要由扫盘、式拾捡器以及升降机构等组成。在完成系统构型设计、结构设计的基础上,实现了枣粒的高效收获。
红枣 收获机 拾捡器 农业机械
引言
红枣是我国林果业中的特色林果,其种植面积和产量均占世界的99%,韩国的红枣种植面积仅有0.1万hm2,总产约2万吨。因此,我国是世界最大的红枣生产国和出口国。晋、陕北部黄河沿岸土石山区和无定河中下游的丘陵沟壑区,不仅是红枣的优生区,也是我国枣树的起源地之一,这里产的红枣个大、色鲜、品质优。从自然环境分析,丘陵沟壑区的多个区县都是红枣的适生区,而位于黄河沿岸的区县是最佳优生区。目前,种植面积约30万公顷,产量达数百万吨,经济效益较为显著。这一区域红枣树种植主要以高大、分散为主,其收获方式主要通过高枝抖落或竹竿敲打,落地后由人工手动拾捡。由于高大树木尺寸及树冠形状各异,不利于使用机械设备抖落,专门用来拾捡落地红枣的设备较少。目前,我国在红枣收获机械的研制方面取得一定进展,但是对分散种植枣园的收获机械研究较少。新疆农垦科学院研制的4YS-24型红枣收获机和石河子大学机械电气工程学院研制的4ZZ-4型自走式红枣收获机,对矮化密植枣园收获效果良好,但不适合高大、分散的种植枣园。针对上述情况,设计一种可用于高大、分散种植枣园红枣落地后的红枣捡拾机,以适应晋、陕北部黄河沿岸土石山区和无定河中下游的丘陵沟壑区高大、分散的枣园的收获,要使该机械具有结构简单,操作方便,实践效率高等优点,能一次性完成红枣的捡拾工作。
1 总体设计要求
由于红枣落地后散落面积大,因此,在过去一直以人工拾捡为主,但该方式已不能满足现代农业发展的要求,迫切需要借助机械装置来完成拾捡任务。作为专门针对拾捡过程设计的拾捡系统,可以使拾捡过程实现机械化,在一定程度上节省工作时间,降低农民的劳作强度,真正实现高效、快速的机械化收获红枣。
自动拾捡系统是为了能将散落于地面的红枣以固定方式拾捡起来,并能去除杂物的一种装置。因此,要满足以下三点设计要求:第一,需要保证一定的拾捡区域,以提高收获效率;第二,需要适应不同地形,不受矮小凹凸地形阻碍;第三,尽可能保证拾捡干净,避免资源浪费或人工二次收获。
2 拾捡装置运动原理及机构设计
2.1 运动原理
为了满足功能需求,合理设计拾捡装置。该装置具有汇聚一定面积内红枣和集中高速拾捡两个功能。
行走系统由行走轮实现,在收获机向前行走过程中,借鉴环卫车扫盘的工作原理,设计拾捡系统的枣粒聚拢装置,要求聚拢刷的高度可调,空闲状态时提升,使其远离地面,方便移动、搬用,工作时下放,与地面接触,完成枣粒聚拢。拾捡器高度位置同样可调,前进作业时,上下浮动将枣粒从地上检起,进入输送装置。
2.2 机构设计
(1)聚拢刷。聚拢刷随整车同步前进,同时需要具备一定范围内的上下移动功能。前进作业时下放与地面接触,通过旋转运动,使位于其下部的枣粒向中心部位汇聚,便于拾捡机收获。聚拢刷的主要功能是通过扩大收获面积,从而提高拾捡机构的收获效率。其工作原理如图1所示。聚拢刷的功能和特点如下:第一,刷子具有的弹性可以适应各种地面;第二,不会遗漏凹、洼处的枣粒;第三,增大作业面积,提高收获效率。

图1 工作原理图
(2)拾捡机构。拾捡机构主要功能是完成枣粒的拾捡任务,根据枣粒的几何形状及其种植地面特征,设计弹性耙齿结构。工作时,耙齿会有一定的入土深度,利用耙齿的弹性势能,将红枣弹起并进入捡拾机的壳体内。同时,可以滤掉渣土等杂物,兼具拾捡与分离功能,结构简单,收获效果良好。其设计结构如图2、图3所示。
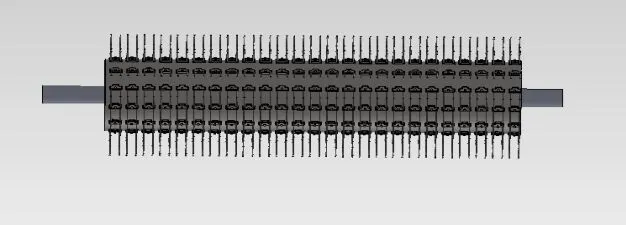
图2 捡拾器正视图
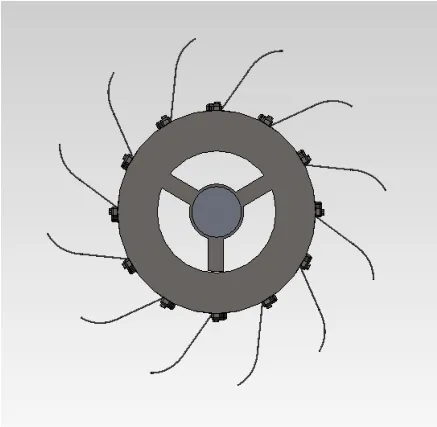
图3 捡拾器左视图
3 传输装置运动原理及机构设计
3.1 运动原理
枣粒被拾捡后分布在整个拾捡器轴线上,在该轴线上布置的有横向传输装置,该装置将轴线上的枣粒送至刮板输送机。
3.2 机构设计
(1)横向输送器。横向输送器采用螺旋机构推送枣粒,其工作原理为旋转的螺旋叶片将物料推移而进行螺旋输送机输送,使物料不与螺旋输送机叶片一起旋转的力是物料自身重量和螺旋输送机机壳对物料的摩擦阻力。螺旋传输机构的螺旋轴在枣粒运动方向的终端有止推轴承以克服枣粒给螺旋轴的向反力。其工作原理如图4所示。这种传输机构具有以下5项优势:①密封的工作状态,防止粉尘飞扬,改善工作环境;②结构简单,尺寸小,紧凑;③可同时有若干个进料、出料口,工艺安排灵活,工作时只能打开一个门;④枣粒输送方向是可逆的,可同时向两个方向输送枣粒;⑤操作安全。
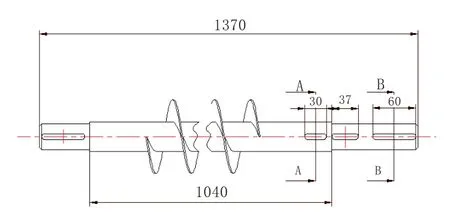
图4 侧向传输装置
(2)刮板式输送器。刮板式输送器输送时红枣从下端送入,由回旋的刮板将物料刮送升运,在外壳上端经排料口卸下红枣。卸下的红枣最终进入车斗内。其结构如图5所示。

图5 刮板式输送器
刮板封闭的矩形断面的壳体内,借助运动着的刮板连续输送散状枣粒。在输送过程中,枣粒受到刮板在运动方向的压力及自身的重量作用,在枣粒间产生内摩擦力。这种摩擦力保证了枣粒之间的稳定状态,并足以克服枣粒在机壳中移动而产生的外摩擦力,使枣粒形成连续整体的料流而被输送。刮板输送机结构简单、重量轻、体积小、密封性强、安装维修比较方便;能倾斜甚至垂直提升输送,且能组合布置,串联输送;能多点加料,也能多点卸料,保证设备工艺布置较为灵活。而封闭的壳体对改善工人的操作条件方面都有较突出的优点。
4 总结
耙齿式红枣捡拾机的设计需要充分发挥机械的特性,最大限度利用机械结构对红枣进行采集且保证收获的红枣质量和采净率。这种结构的拾捡设备可以高效解决丘陵沟壑区高大、分散种植红枣的收获任务,且设备结构简单,操作方便,拾捡效率是人工的5倍以上,对在晋、陕北部黄河沿岸土石山区和无定河中下游的丘陵沟壑区,进行规模化种植传统优质的高大红枣树具有重要作用,推动区域农业经济结构转型发展。
[1]王贵忠.籽瓜捡拾装置的设计[J].机械研究与应用,2012,(4):148-150.
[2]吴崇友,丁为民,石磊,等.油菜捡拾收获机齿带式捡拾器运动学分析[J].中国农机化,2012,(4):68-70.
[3]陈度,杜小强,王书茂,等.振动式果品收获技术机理分析及研究进展[J].农业工程学报,2011,(8):195-200.
[4]盛凯,曾南宏,程凯.弹齿滚筒捡拾器的机构设计的解析方法[J].吉林工学院学报,1990,(2):50-57.
[5]邓玉珍.4YS-24型红枣收获机[J].农业机械,2010,(3):89.
[6]汤智辉,沈从举,孟祥金,等.4YS-24型红枣收获机的研制[J].新疆农机化,2010,(1):30-32.
[7]汤智辉,贾首星,沈从举,等.新疆兵团林果业机械化现状与发展[J].农机化研究,2008,(11):5-8.
[8]梁鸿.中国红枣及红枣产业的发展现状、存在问题和对策的研究[D].西安:陕西师范大学,2006.
[9]郭晓成,李倩娥.枣树栽培新技术[M].咸阳:西北农林科技大学出版社,2005.
[10]沈瑞珍,俞国胜.樟子松球果采集机具的研究[J].北京林业学院学报,1990,(S1):40-48.
Research and Design on Device of Picking Harvester Red Dates
MA Liyun, TIAN Maoti,SONG Yabin, ZHANG Yingying
(Luliang University, Luliang 033001)
The dates fall during the harvest, picking up as the key to components, related to the ability to quickly and efficiently ground grain harvest date. This article is designed to automatically complete the task of picking up picking up the system, the system has t he sc an disk, f inger style picking up t he device and the lifting mechanism and other components. In complete system configuration design, structural design, based on the realiz ation of an efficient grain harvest date.
dates, harvester, picking up device, agricultural machinery
吕梁学院校级基金资助项目(ZRXN201305)。