机载防撞系统TCASⅡVersion 7.1与Version 7.0软件的比较
2015-12-17彭良福林云松
彭良福,林云松
(1.西南民族大学电气信息工程学院,四川 成都 610041;2.电子科技大学自动化工程学院,四川 成都 610051)
机载防撞系统TCASⅡVersion 7.1与Version 7.0软件的比较
彭良福1,林云松2
(1.西南民族大学电气信息工程学院,四川 成都 610041;2.电子科技大学自动化工程学院,四川 成都 610051)
针对机载防撞系统TCAS软件版本的改进,描述了TCASⅡVersion7.1对Version 7.0软件所作的修订,分析了Version 7.0与Version 7.1软件的差异和改进.按照DO-185B所规定的TCAS系统最低性能需求,采用软件工程的方法,完成了TCASⅡVersion 7.1防撞算法的软件设计和编程并建立了相应的软件测试平台.通过采用一组标准输入及输出的测试用例文件,将标准输入产生的输出结果与DO-185B的输出结果进行比对,验证了TCASⅡVersion 7.1防撞算法和处理逻辑的正确性和有效性.
机载防撞系统;防撞算法;处理逻辑
随着我国民航业的迅速发展,空中交通密度日益增加,航路拥挤以及飞行高度层控制的改进都使飞机空中相撞的可能性愈发增大.开发和改进有效的机载防撞系统(Traffic Alert and Collision Avoidance System,TCAS)应对空中碰撞风险一直以来都是航空业发展的动力.TCAS可以为飞机提供空中防撞的功能[1-3].它通过更新本机位置及状态信息,接收目标飞机的应答信息,并对这些信息进行解算,从而决定是否需要对目标飞机发布交通建议(Traffic Advisory,TA)或者解脱建议(Resolution Advisory,RA)告警,同时将目标飞机的位置及状态信息显示在显示器上[4].
TCAS早期使用的软件版本虚警率高、扰乱驾驶员精力.美国联邦航空局(FAA)对此进行了研究和协调并修订了软件.在大量的调试和试飞中不断改进,从最初用的6.0版本,历经6.04修订本和6.04A修订本,最后以Version 7.0修订本为准,使其能解决原先存在的问题,被驾驶员、管制员和管理当局普遍接受[5].2001年1月的日本事件、2001年7月的比利时事件、2001年12月的法国事件、2002年2月的德国事件,2002年3月的法国事件,2002年7月的柏林碰撞等飞行事件的发生,使得FAA又着手对Version 7.0修订本进行了改进和测试,在设计中纠正缺陷并形成最终版本TCASⅡVersion 7.1[6].2008年TCASⅡVersion7.1软件被FAA批准并指望在2010-2011年使用.
目前大多数飞机装备的机载防撞系统都是7.0版本,本文介绍了TCASⅡVersion7.1对Version7.0所作的修订,重点分析了Version 7.0与Version 7.1之间的差异和改进情况,并采用软件工程化的方法,按照DO-185B VolumeⅡ所规定的TCAS系统最低性能需求[7],完成了TCAS Version7.1防撞算法的软件设计和编程,并且建立了相应的软件测试平台来验证TCAS算法和逻辑的正确性.国内开展对TCAS的研究工作起步较晚,直到2010年国产的机载防撞系统才首次试飞成功[8].目前国内对机载防撞系统的研究主要针对TCASⅡ7.0版本[9-14],而对TCASⅡ7.1版本的研究尚未见报道.因此,对于TCASⅡVersion 7.1软件的研究,有利于开发出满足适航要求的防撞告警软件,有助于我国自主研制和开发适用于国产飞机的机载防撞系统.
1 软件TCASⅡVersion7.1与Version7.0的差异
TCASⅡVersion7.0软件的主要功能是对防撞系统作用范围内的目标飞机的运动趋势进行监视、跟踪并预测其运动轨迹,同时结合本机的运动方向、飞行速度、飞行姿态等信息综合评估目标飞机的威胁程度.
TCASⅡVersion7.0版本的防撞逻辑采用本机与临近飞机在最接近点(CPA)的水平间距和垂直间距作为基本参量,预测和判断本机是否可能与临近飞机发生碰撞[15].只有当水平间距和垂直间距同时小于安全阈值时,才能够判定两架飞机可能会发生碰撞. TCAS防撞逻辑根据本机与目标飞机之间的空中几何位置可以预测出两架飞机之间的最小垂直间距,从而确定本机采取何种机动防撞措施.本机采取机动措施的目的就是通过机动飞行在两架飞机之间产生足够大的垂直间距.在多机情况下,采用将临近飞机分别与本机进行逐一比对的方法,通过对本机和每架临近飞机在最接近点的相对距离和相对高度差的预测和估算,完成对每架临近飞机是否产生交通建议(TA)和解脱建议(RA)的判断.TCAS试图通过对碰撞威胁队列中的每架临近飞机的循环比对,以及多机之间避免碰撞的相互协调信息的处理来完成本机的避让方向和避让强度的选择及优化.
与TCASⅡVersion7.0软件相比,TCASⅡVersion7.1软件在防撞算法和处理逻辑方面都进行了改进,主要对两个安全问题(反转逻辑,调整垂直速度、调整RA)进行了修正,同时对多机逻辑也进行了修正.由于这些修正,使得DO-185B的测试用例(Test Suite)变成了330个,比DO-185A的测试用例305个多增加了25个.此外,TCASⅡVersion7.1软件后向兼容TCASⅡVersion7.0软件.
1.1 反转逻辑(Reversal logic)
反转RA是在TCASⅡVersion7.0中引入的适应两架飞机相遇时变化的情况,即原先发布的解脱建议(RA)明显变为要产生错误后果的情况,尤其是当两架飞机中有一个飞行员决定不服从解脱建议(RA),或者是地面ATC指示飞行员执行一种特殊机动的情况.主要有以下两种情况:
1)当本机发布下降RA时,目标飞机安装了TCAS,这时目标飞机的TCAS向飞行员发布爬升RA,但是其飞行员不服从TCAS指示.尽管本机已经发布了下降RA,同时目标飞机的TCAS也向其飞行员发布了爬升RA,但是目标飞机的飞行员不服从TCAS的指示或者是地面ATC指示要求其下降,此时将产生冲突危险.
2)当本机发布下降RA时,目标飞机未安装TCAS,由于受到地面ATC指令要求其下降或者是目标飞机按照目视飞行规则(VFR)出现意外的向下机动.尽管本机已经发布了下降RA,但是由于目标飞机未安装TCAS,两架飞机不能协调,此时将产生冲突危险.
为了解决上述两种情况存在的冲突威胁,在Version7.1中引入了对当前反转逻辑的改进,增加了反转RA的稍晚发布以及使原来的反转RA失效.在Version Proposal 112E(CP112E)中,首先增加了RA服从的特征.基于当前的垂直速度,CP112E中增加了在最接近点(CPA)的垂直间距的预测,以探测是否需要反转RA.当预测的结果表明飞机很可能比预先设定的门限更接近时,对于垂直间距小于100ft的飞机,反转RA将被作为有效的选项.例如:当本机发布下降RA后,本机继续监视目标飞机,如果发现目标飞机仍然在下降,或者没有接收到目标飞机发布的爬升RA,那么本机将建立目标飞机不服从RA的信息,然后本机采取反转,由原来的下降RA转变为爬升RA.即反转RA的稍晚发布和原来的反转RA失效.
在两架飞机相遇时,反转RA不能发布得太早,以便在反转之前为原先发布的RA变得有效留出适当的时间.此外,为了避免无效的反转RA,反转RA也不能触发得太晚,以至于太接近预测的最接近点(CPA).
1.2 调整垂直速度、调整RA
空管安全运行监测表明,在某些情况下飞行员不能对“调整垂直速度、调整”RA(Adjust Vertical Speed,Adjust RAs,简称AVSA RAs)正确地做出响应. AVSA RA声音告警不明确,不能清晰地暗示方向. AVSA RA建议飞行员将飞机的垂直速率调整到2000ft/min、1000ft/min、500ft/min、0ft/min.飞行员会连续收到相同垂直方向上的4个RA,但是没有向上或者向下的语音提示.包括航空公司和事件调查权威组织得出的结论都是“调整垂直速度,调整”RA的声音信息太模棱两可,而且向飞行员表示的AVSA RA (即显示信息和声音信息)应该加强.存在着这样的历史记录,有些飞行员故意不对AVSA RA产生反应,而是增大其垂直速度来代替降低垂直速度,从而导致飞行冲突情况更加恶化.通过观察已经发现单独增加训练可以在发布AVSA RA时改进飞行员的行为,但是不足以避免所有的相反响应.
Version7.0软件的设计初衷是希望飞行员仅仅通过连续调整爬升/下降率来柔和地保证垂直间隔,而不是通过爬升、下降、平飞的机动动作来达到同样的目的.在Version 7.1中用一个“平飞,平飞”(Level Off,Level Off)RA来代替重复4次的“调整垂直速度、调整”RA.即原来的调整垂直速度、调整RA需要四个垂直速度(2000ft/min、1000ft/min、500ft/min、0ft/ min)改变为需要一个平飞RA(垂直速度0ft/min).用一个“平飞”RA代替几个“调整垂直速度、调整”RA是对AVSA RA问题的一种有效的解决办法,因为相关的声音信息直接明了,而且相关的机动措施与在紧急情况下已执行的标准机动措施一致.这样修改的额外好处就是可以简化由TCASⅡ提供的RA列表,因为要求将垂直速度降低到500ft/min、1000ft/min、2000ft/min的RA变得不需要了.当然,相应地也会影响RA的显示.
1.3 多机逻辑(Multi-Aircraft Logic)
多机冲突是指本机同时遭遇两架(含两架)以上的威胁飞机的情况.在TCASⅡVersion7.0版本的防撞算法中,TCAS可以处理多架飞机相遇的情况,即在同一时刻多于一架目标飞机的相遇.TCAS试图通过选择将会对目标飞机中的每一架飞机都能提供足够垂直间隔的单个RA来解决这类相遇的问题.这些RA可能是爬升或下降,或者是一个爬升和下降RA的组合,例如:勿爬升和勿下降.在这样的相遇中选择的RA也许对所有的目标飞机都不能提供垂直间隔. Version7.0软件提供了对多架飞机的逻辑处理能力,允许该逻辑利用增大高度率RA和反转RA较好地解决多机相遇的问题.采用Pairwise的策略对多机进行处理[16],将威胁飞机放入TF队列中,同时将威胁飞机分类后(共分为3类:新的威胁飞机、持续的威胁飞机、结束的威胁飞机)放入WL队列中,然后将WL队列中的每架飞机与TF队列中的每架飞机逐架进行比较,看本机针对其指向是否一致.多机处理的时候,首先是判断准备处理的威胁飞机(当前的威胁飞机)是否装备了TCAS.对于装备了TCAS的威胁飞机,按照一套处理流程进行;对于没有装备TCAS的威胁飞机,则按照另外一套流程进行处理.
在TCASⅡVersion7.1版本中,关于TCAS多机逻辑的改变影响了多机威胁情况下“投影在中间”的飞机,并且去掉了伴随飞机RA的绿色弧线.
为了更加精确地描述当本机“投影在中间”时多机逻辑的行为,以下的修正是需要的.当一架安装了TCAS的飞机遭遇多机冲突时,将采用特殊的规则:“投影净空在上面”飞机的飞行员被告知要爬升(CLIMB),“投影净空在下面”飞机的飞行员被告知要下降(DESCEND).“投影在中间”的飞机被告知限制其爬升和下降,直到上面或者下面的飞机不再处于飞行冲突状态为止.在多机情形,当临近下降禁止高度门限时,正的下降RA(positive DESCEND RA)的选择将受到TCAS飞机的性能限制.在这种情况下,将选择负的勿爬升RA(DON’T CLIMB RA)来代替下降RA.
当本机将要垂直地通过两架威胁飞机之间时,多机逻辑的设计要注意防止过早发布平飞RA.这要求保留正的RA直到满足某些标准为止,以便使垂直间隔最大化.多机逻辑也包括模拟和选择增大高度率RA和方向反转的能力,以便更好地解决由于本机或者威胁飞机相反的机动导致的飞行冲突恶化的情况.当然,产生增大高度率RA的能力受到增大爬升(INCREASE CLIMB)和增大下降(INCREASE DESCEND)禁止指示和门限的限制.多机逻辑也完成对所有新威胁飞机的无偏估计,以便对所有的威胁飞机选择最优的RA,而不是由对第一架威胁飞机选择的最初的RA来限制对第二架或者第三架威胁飞机的RA的选择.
2 TCASⅡVersion 7.1与Version7.0程序的比较
与TCASⅡVersion7.0软件相比,TCASⅡVersion7.1软件在防撞算法和处理逻辑方面进行了改进,主要对解脱建议(RA)的两个安全问题以及多机逻辑进行了修正.
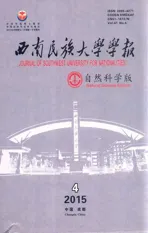
具体来说,TCASⅡVersion7.1软件对解脱建议(RA)、多机处理逻辑和显示三个方面的程序都进行了修正.解脱建议部分(Resolution Adversary)进行了修正的程序是新威胁飞机文件条目(New_threat_file_ entry)、处理新的或连续的威胁飞机(Process_new_or_ continuing_threat)、反转检查(Reversal_check)、反转模拟(Reversal_modeling)、RA监视(RA_monitoring)、做出决策(Take_decision).多机逻辑部分(Multiaircraft Logic)进行了修正的程序是多机会聚检查(Multiaircraft_converging_check)、TCAS保留处理(TCAS_ retention_processing)、双重负指向处理(Dual_Negative_Sense_Processing).显示部分(Display)进行了修正的程序是建立全局标记(Set_up_global_flags).除了显示部分之外,TCAS语音通告部分也有变化,表1给出了TCASⅡVersion7.0和Version7.1语音通告的区别.
表1 TCASⅡVersion 7.1与Version7.0语音通告的比较Table 1 Comparing of aural annunciations of the TCASⅡVersion 7.1 versus Version7.0
3 TCAS防撞算法Version7.1软件的测试验证
1)硬件环境:PC/工作站(x86),
2)操作系统:Windows XP/WIN7(32位),
3)软件开发环境:VxWorks5.5(C语言),
4)测试输入/输出文件:
a)测试输入(EnxxTSxx.dat),
b)测试输出(FTxxTSxx.txt).
3.1 测试验证总体结构
测试想定文件包含输入文件和输出文件两部分.输入部分模拟了不同时间监视功能所测量到的本机和目标飞机的各项参数数据,输出文件则针对输入想定的不同情况对防撞算法和处理逻辑的运算结果进行输出.
这些钱可以公积金中心作为业主的住房公积金,用于小区公共设施的维修与保养,及到光伏设备寿命后期的更新,或者也可让业主减少支付一部分物业费。
测试模块要求读取输入文件,按照T时间间隔的顺序,根据系统提供的每个T时间间隔开始的中断,将对应T时间间隔的数据放到相应的输入变量中,并发送给CAS防撞算法.待每次防撞逻辑周期运行完成后,将实际运算结果输出至输出文件中,并与DO-185B的标准输出文件相比对,以此来判断防撞算法和处理逻辑的正确性.
在仿真测试系统中,系统的操作通过按时间顺序排列的一组事件序列来表示.每个事件发生在某一时刻,表示系统状态的改变,例如TCAS系统Standby状态、TA Only状态和TA/RA状态之间的转换,以及告警灵敏度之间的转换等.
建立基于事件的离散状态仿真测试平台可以有效地测试TCAS软件中CAS逻辑的有效性和正确性.基于事件的CAS逻辑仿真测试系统除了CAS核心所有状态变量及处理逻辑外,还包括以下组成部分:
1)时钟T(1秒周期):负责对仿真时间的跟踪.
2)输入状态:通过对标准输入文件的解析,测试平台将输入文件转化为若干与CAS逻辑输入变量兼容的输入状态变量.在本测试系统中,包含四个主要的输入状态数组变量,它们均按照时间顺序排列并在每个CAS逻辑处理周期开始对CAS逻辑相应的输入接口变量完成赋值操作:
a)本机状态,
b)目标飞机状态,
c)协调信息,
d)地面站信息.
3)输出:仿真测试平台将每个CAS逻辑完成后的输出信息打印到输出文件中,与标准输出文件比对完成对CAS逻辑正确性与有效性的判定.
3.2 TCAS防撞算法Version7.1软件的测试方法
在TCAS防撞系统中,通过总线方式把S模式/ IFF、高度计、离散数据输入、设备面板等外部设备与防撞处理单元联系起来,由总线中断处理程序实现对各外部设备输入数据的处理.同时,监视程序(Surveillance)操纵前端设备,收集目标飞机的高度、距离、方位等信息,建立对目标飞机的监视跟踪缓存,并把中断处理程序获取的本机数据及建议消息一起形成提交给防撞逻辑的消息队列.防撞逻辑中的接收/发送程序处理消息队列,获取本机数据(包括本机周期数据、面板设置及离散数据)、目标飞机的航迹跟踪监视数据、目标飞机发来的建议消息以及地面站发送的控制信息等,由防撞逻辑主程序进行本机跟踪和目标飞机跟踪,进行解脱建议及显示输出.在每次测试的开始,测试输入模块读取输入文件,根据系统提供的每个T时间的中断,将对应时刻的测试数据放到对应的输入变量中,通过消息队列的方式传送给防撞算法主流程.
TCAS防撞算法Version7.1软件的测试验证采用测试输出文件和标准输出文件进行比对的方式进行验证,验证方法依据RTCA DO-185B标准中建议采用的方法,使用DO-185B中提供的测试想定文件(在ENCOUNTR目录中)作为输入,每次测试选择其中的一个测试想定文件作为CAS逻辑的输入,并在每个周期结束时,将伪码描述的输出状态以文件的方式输出并保存到本地硬盘中.运行结束后,将得到的输出文件与RTCA DO-185B中提供的标准输出文件(FTxxTSxx.txt)进行比对.需要对DO-185B中330个测试用例进行测试并与标准结果进行对比,比对可采用Beyond Compare 2文件比较器完成.如果所有测试用例均通过验证后,那么表明CAS逻辑符合DO-185B所规定的系统最低性能需求.
4 结束语
TCASⅡVersion7.1版本在防撞算法和处理逻辑方面在TCASⅡVersion7.0版本的基础上进行了改进.本文对TCASⅡVersion 7.1与Version7.0进行了比较,着重阐明了TCASⅡVersion7.1版本对两个安全问题(反转逻辑,调整垂直速度、调整RA)进行的修正,以及对多机逻辑进行的修正.采用软件工程的思想和方法,经过需求分析、软件设计、测试验证一系列软件工程设计,按照DO-185B VolumeⅡ所规定的TCAS系统最低性能需求,完成了TCASⅡVersion7.1版本的防撞算法的软件设计和编程,并建立了相应的软件测试平台.通过采用一组测试用例的标准输入及输出文件,将TCAS软件中CAS核心模块载入该测试验证平台,由标准输入产生的输出结果与DO-185B的标准输出结果进行比对,验证了CAS算法和逻辑的正确性和有效性.通过对TCASⅡVersion7.1软件的防撞算法及处理逻辑进行分析、测试及验证,有助于从事机载防撞系统的科研人员掌握TCAS防撞告警算法和处理逻辑,可以为进一步研制适合我国军用、民用飞机的综合监视系统(ISS)提供参考.
[1]ABDUL BAKI B,BALDWIN J,RUDEL M P.Independent validation and verification of the TCASⅡcollision avoidance subsystem[J].IEEE Aerospace and Electronic Systems Magazine,2000,15(8):3-9.
[2]何晓薇.空中交通警戒与防撞系统的主要技术特点[J].中国民航飞行学院学报,2001,12(3):40-42.
[3]西蒙.安全卫士:空中防撞系统[J].大飞机,2014,(5):101-102.
[4]BELKIN V V,YANOVSKY F L.Aircraft collision avoidance system,2007 IEEE Aerospace Conference Proceedings,Big Sky,MT,United States,March 3-10,2007[C].
[5]Introduction to TCASⅡVersion7[S].Federal Aviation Administration,2000.
[6]Introduction to TCASⅡVersion7.1[S].Federal Aviation Administration,2011.
[7]RTCA/DO-185B.Minimum operational performance standards for traffic alert and collision avoidance systemsⅡ(TCASⅡ),Version7.1 [S].RTCA(Radio Technical Commission for Aeronautics),2008.
[8]良辰.试飞院完成首个国产机载防撞系统定型试飞[EB/OL]. (2010-03-18)[2013-03-22].http://www.mte.net.cn/newsdetails.aspx?newsid=1981.
[9]林云松,彭良福,童玲.空中防撞系统避撞机制的数学模型[J].电子科技大学学报,2008,37(4):552-555.
[10]刘志刚,彭良福,林云松.机载防撞设备TCAS空对空通信中干扰的抑制技术[J].中国民航飞行学院学报,2009,20(1):28-31.
[11]彭良福,林云松.机载防撞系统垂直防撞的物理模型[J].电讯技术,2010,50(8):7-11.
[12]苏彬,胡俊.飞行仿真中的TCAS建模方法[J].计算机应用,2010,30(1):258-261.
[13]沈佳峰,肖刚,敬忠良.空中交通警戒和防撞系统机动策略及仿真研究[J].电光与控制,2011,18(10):20-23.
[14]付炜,雷力.全任务飞行模拟机TCAS系统设计与实现[J].系统仿真学报,2013,25(8):1825-1828.
[15]RTCA/DO-185A.Minimum operational performance standards for traffic alert and collision avoidance systemsⅡ(TCASⅡ)airborne equipment[S].RTCA(Radio Technical Commission for Aeronautics),1997.
[16]傅小芮,林云松,童玲.TCAS系统多目标机冲突决策处理的研究[J].自动化信息,2007(11):28-30.
(责任编辑:张阳,付强,李建忠,罗敏;英文编辑:周序林)
Comparison of the TCASⅡsoftware Version7.1 and Version7.0
PENG Liang-fu1,LIN Yun-song2
(1.School of Electrical and Information Engineering,Southwest University for Nationalities,Chengdu 610041,P.R.C.;
2.School of Automation,University of Electronic Science and Technology of China,Chengdu 610041,P.R.C.)
For the update of software version of TCASⅡ,the change proposals of the TCASⅡversion 7.0 to version 7.1 are described,and the difference and improvement are also analyzed and compared.According to the minimum operational performance standards for TCAS required by DO-185B,the software of the TCASⅡversion 7.1 is designed and programmed by using the method of software engineering,and a software test platform is also set up.The correctness and effectiveness of algorithm and CAS logic of the TCASⅡversion 7.1 are testified by using a set of standard test suits and comparing the output results of DO-185B with the output results produced by the standard input.
Traffic Alert and Collision Avoidance System(TCAS);algorithm of anti-collision;processing logic
V243
A
2095-4271(2015)04-0501-06
10.11920/xnmdzk.2015.04.021
2014-11-27
彭良福(1966-),男,汉族,重庆合川人,教授,博士,研究方向:航空电子系统;E-mail:pengliangfu@126.com.
国家自然科学基金资助项目(No.61374190)