基于全弹道控制分析的水下航行器攻击模型视景仿真*
2015-12-17葛立志
葛立志
(昆明船舶设备研究试验中心 昆明 650051)
基于全弹道控制分析的水下航行器攻击模型视景仿真*
葛立志
(昆明船舶设备研究试验中心 昆明 650051)
研究并建立高空滑翔水下航行器的虚拟现实的视景仿真系统,分析水下航行器全弹道控制并在视景仿真平台下实现水下航行器全弹道多状态攻击轨迹模型。高空滑翔水下航行器姿态变化快,背景参数复杂,视景仿真中会出现局部模型快速变化或者模型分离的难题。提出采用DOF和Switch节点相结合的方法,利用其Matlab Simulink仿真模型,计算高空滑翔水下航行器的六自由度数据,通过Matlab的“To Workspace”模块将六自由度数据输出并存档。在VC++6.0环境下编写Vega应用程序,读取运动参数,应用LOD技术在不降低显示速度的同时提高仿真视觉效果。仿真实验和测试效果表明,系统实能实现水下航行器在空中滑翔、低空突防、滑翔翼脱离以及水下攻击等多状态的水下航行器运动弹道轨迹和视景仿真效果,以及运动控制参数的同步跟踪,不再会因局部模型快速变化和模型分离而失真。为分析空投滑翔水下航行器的运动轨迹提供了数据支撑和视景平台支持,对展开高空滑翔水下航行器的弹道控制研究和试验具有重要价值。
滑翔水下航行器; 虚拟现实; 视景仿真; 全弹道
Class Number TJ630.1
1 引言
随着潜射水下航行器的发展,高空滑翔水下航行器逐渐成为反潜和反舰攻击的重要武器。高空远程滑翔水下航行器的作战流程可以分为:无动力滑翔、低空变轨突防、减速入水以及水下搜索攻击。研究基于全弹道控制分析的水下航行器攻击模型视景仿真系统,全面、形象、直观、生动地显示滑翔水下航行器的形状、航迹、姿态以及动态运动过程,在对该武器的系统设计和试验测试具有重要指导意义。
三维视景仿真技术是近几年随着计算机技术与仿真理论的发展而产生的一门新兴学科,可以有效地解决水下航行器攻击模型视景仿真这一问题[1]。采用Multigen Creator3.2建模、Vega Prime2.2.1视景仿真平台、Vc.net和Matlab7.0联合编程等建立仿真系统的总体技术路线,充分发挥各自的优势,将以上四者结合可以开发出功能强大的视景仿真系统。本文基于实际需求,使用Creator和Vega建立高空滑翔水下航行器的全弹道视景仿真系统,选择Visual C++6.0作为编程工具[2],应用LOD技术在不降低显示速度的同时提高仿真视觉效果。高空滑翔水下航行器的视景仿真中会出现局部模型快速变化或者模型分离的问题[3]。针对这一问题,提出DOF和Switch节点相结合的方法,大幅减轻了编程和建模工作,实现了高空滑翔水下航行器的可视化仿真。系统开发理论联系实际,密切结合工程应用,通过视景仿真实现高空滑翔水下航行器多种攻击状态阶段的全弹道分析效果,为后续研究提供数据支持和平台基础。
2 基于Creator和Vega的视景仿真平台的建立
高空滑翔水下航行器的仿真模型可以分为质量惯矩模块、气动参数模块、大气模块、地球物理模型模块、六自由度方程模块。Matlab Simulink Air_Weapons_UUVes工具箱的使用,可以很方便地构建高空滑翔水下航行器数字仿真平台,如图1所示。使用该平台对高空滑翔水下航行器的运动过程进行数字仿真,并将六自由度数据通过“To Workspace”模块输出并保存,为进一步的视景仿真提供数据[4]。
高空滑翔水下航行器的整体仿真环境包括入水前和入水后两部分:入水前主要包括天空、海面环境、舰艇和舰载直升机等;入水后主要包括海水、海底环境等。仿真开始时,舰艇在海面巡航,一定时间后,舰载直升机起飞,将航空吊放声纳投放在可疑区域,通过声纳发现目标后,目标信息发送至机场。之后挂载高空滑翔水下航行器的反潜飞机进入攻击位置并投放高空滑翔水下航行器,高空滑翔水下航行器一定时延后打开折叠翼进入滑翔段弹道。当高度降至适当位置时,突防火箭点火,进入低空突防弹道。突防结束后,通过爆炸螺栓将滑翔翼分离,减速火箭点火,高空滑翔水下航行器入水转入水下弹道,直至完成攻击任务[5~8]。为了最大可能地利用Matlab simulink的仿真成果,调用了DWK的模型库。系统模型开发的主要内容有:
1) 三维模型库:涉及的模型有高空滑翔水下航行器、空投飞机、舰载直升机、机场、潜艇、舰艇等;
2) 海洋环境:海底、海面以及海水;
3) 特效:主要包括直升机起飞、入水、潜艇、航行尾迹、舰艇航行效果等。
仿真平台建模过程示意图如图1所示。从图1中可见,首先对水下航行器的外形数据,进行CAD建模,相应的图像经过图像处理技术进行加工,通过虚拟现实软件Creator以及Vega对视景平台进行开发,然后进行水下航行器控制后置处理,实现高空滑翔水下航行器六自由度全弹道分析及视景仿真。
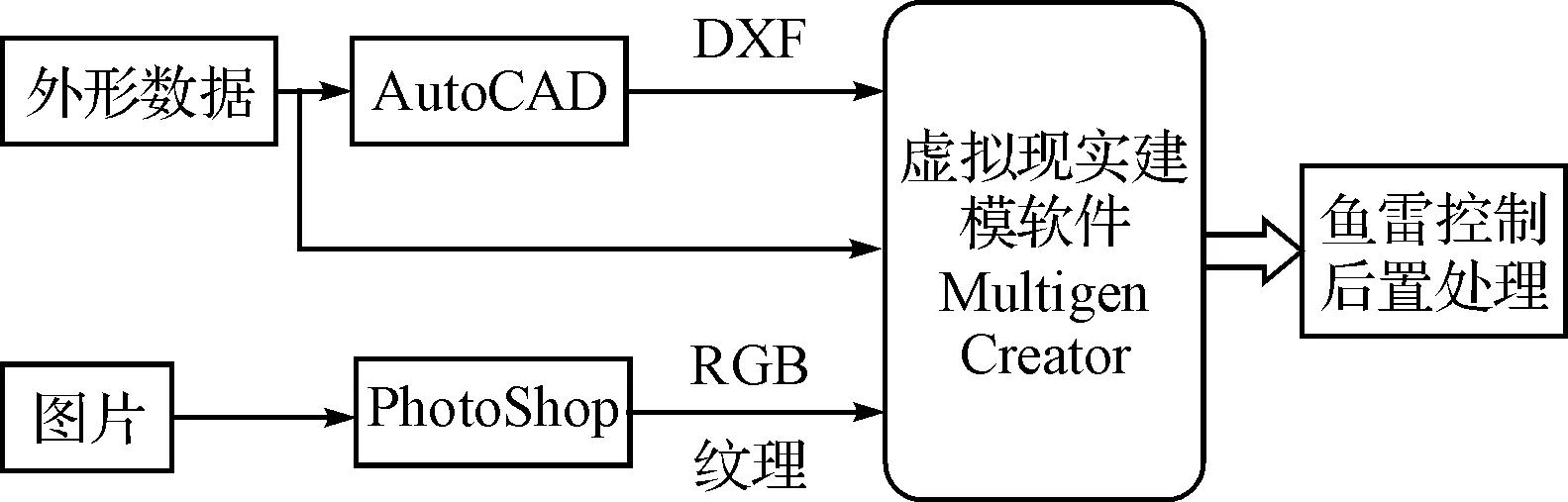
图1 视景仿真和弹道分析平台建模过程示意图
3 滑翔水下航行器运动控制数学模型
采用六自由度全弹道分析方法研究高空滑翔水下航行器视景仿真效果,首先需要对滑翔水下航行器运动控制模型进行数学建模。
本文主要用到以下几个坐标系:速度坐标系Ox3y3z3、体坐标系Ox1y1z1、弹道坐标系Ox2y2z2、地面坐标系Axyz。假定滑翔水下航行器的纵向运动是对称的,而且在纵向运动时,水下航行器滑翔中的倾斜操纵机构和偏航操纵机构没有动作,也就是说舵面没有做出破坏纵向运动对称性的偏转。或者说,虽然出现了横滚等运动,但是能够在很短的时间内消除,从而没有来得及影响纵向运动。这时就可以单独得到滑翔水下航行器的动力学模型方程组为
(1)
(2)
式中,m为水下航行器质量;P为动量矩;θ为弹道倾角,速度矢量(Ox2轴)与水平面间的夹角;α为攻角,水下航行器质心的速度矢量(Ox3轴)在水下航行器纵向对称面Ox1y1上的投影与Ox1轴之间的夹角,若Ox1轴位于速度矢量的投影线的上方时α为正,反之为负。X,Y,Z表示作用在高空滑翔水下航行器的总空气动力沿速度坐标系分解得到的阻力、升力、侧向力。
通过计算滑翔水下航行器横滚力矩、偏航力矩和俯仰力矩以及之间的关系,可列出高空滑翔水下航行器的相对运动方程为
(3)
(4)
(5)
(6)
其中,Mx、My、Mz为分别横滚力矩、偏航力矩和俯仰力矩;Jx、Jy、Jz分分别表示水下航行器绕体坐标系各轴的转动惯量。
通过计算水下航行器的质心位置与水下航行器弹道侧滑角、俯仰舵偏角、弹道倾角的关系,可得得到高空滑翔水下航行器运动学模型表达为
(7)

(8)
(9)
(10)

(11)
(12)
其中,x,y,z为质心位置;ψV为俯仰舵偏角;θ为弹道倾角,ϑ为俯仰角,水下航行器的纵轴(Ox1轴)与水平面(Oxy平面)间的夹角;γ为横滚舵角,又称差动舵角。
另外,水下航行器运动方程中角度关系表示为
sinβ=cosθ[cosγsin(ψ-ψV)+sinϑsinγcos(ψ-ψV)]-sinθcosϑsinγ
(13)
sinα={cosθ[sinϑcosγcos(ψ-ψV)-sinγsin(ψ-ψV)]-sinθcosϑcosγ}/cosβ
(14)
α=ϑ-θ
(15)
ψV=f(e1)
(16)
其中,α为攻角,水下航行器质心的速度矢量(Ox3轴)在水下航行器纵向对称面Ox1y1上的投影与Ox1轴之间的夹角;β为水下航行器的侧滑角;e1为控制系统误差。
综上可得高空滑翔水下航行器的纵向运动方程是一组由非线性微分方程组成的动力系统。根据上述控制理论和动力学模型,以某型实验水下航行器与研究载体,计算该型高空滑翔水下航行器六自由度全弹道数据,作为后续的视景仿真平台的状态参量输入数据,为后置处理所用。
4 平台开发及关键技术
4.1 LOD技术的应用
高空滑翔水下航行器视景仿真实现中,当需要具体表现某个模型时,需要将仿真的视觉注意力集中在这个模型上面,如高空滑翔水下航行器在滑翔的时候,观察者关注的只是滑翔和空中的细节,对于机场及海面等其它模型并不需要表现出它的细微特征。因此需要在仿真时用到LOD技术,LOD技术可以在不降低显示速度的同时提高仿真视觉效果,降低计算机资源的占有率[9~11]。
LOD即层次细节技术,其根据模型节点在环境中所处的位置和重要度,决定物体渲染的资源分配,降低非重要物体的面数和细节度,从而获得高效的渲染。因此,LOD技术是控制场景复杂度的一种有效的方法[3]。LOD技术包含静态LOD技术和动态LOD技术。静态LOD技术事先为源目标建立一组不同的LOD的模型,在显示时提供调用;动态LOD技术是需要根据显示条件实时构建不同LOD的模型,以达到提高显示效率的目的。第一种模型由于占用内存大,模型过渡不流畅,因此常应用于动态模型和复杂的静态实体模型;第二种模型则较多地应用于大形地形数据库。
本系统采用静态LOD技术生成一般模型,之后设置每个节点的转入(Switch-in)和转出(Switch-out)参数。再使用Morph方法平滑相邻的LOD模型,使其过渡更为自然;采用Creator的CTS(Creator Terrain Studio)工具生成机场的多层次细节信息。生成的视景仿真平台包括滑翔水下航行器模型,携带空投滑翔水下航行器的战机模型以及直升机模型、和滑翔水下航行器攻击目标舰船模型,四类主要的武器模型库仿真图如图2所示。
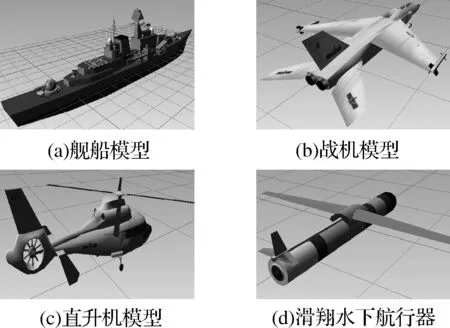
图2 仿真平台构建的四类主要武器模型
4.2 代码开发
基于Vega Prime的视景仿真分为LynX Prime图形界面的设计和视景仿真程序设计。基本场景的搭建、模型初始位置的设置、仿真环境的配置以及常用的特效设置都可以通过LynX Prime图形界面设计完成。LP是一个编辑器,用于增加不同种类的模型,为模型定义参数。这些参数都存贮于应用配置文件(ACF)中的一个模型结构内,例如观察者的位置,模型及它们在场景中的位置,在场景中的移动,光线,环境效果,及目标硬件平台。ACF文件包含了VP在初始化和运行时所需的信息,使用它可以大大减轻开发者的工作量。
部分帧循环代码如下:
while ( beginFrame() != 0 )
{
m_dSimTime = kernel->getSimulationTime();
dtime = m_dSimTime - m_dSimStartTime;
if( dtime - dplodetime > 2 )
{
onKeyInput( vrWindow::KEY_ESCAPE ,0 );
goto L_endframe;
}
……
if( dtime > 30 ) //舰艇
{
warship->Stop();//舰艇停
warship->Turnoff();//直升机起飞
}
else
warship->Run( dtime );//舰艇开
……
//声纳
sn->Suspend();//直升机到达位置且声纳没有完成工作,放声纳
else
sn->FollowHeli( warship->m_pHelicopter ); //直升机没有到达位置或声纳没有工作,声纳随直升机
if( sn->m_bIsSearchFinish )//声纳工作完成
{
//返回目标值
……
//战斗机起飞
plant->TrunOff( m_dSimTime - m_dPlantTurnOffTime );
……
if( plant->m_bIsTrunOff )
{
plant->Fly( m_dSimTime - m_dPlantFlyTime ); //战斗机飞往发射点
warship->Reset();
}
if( !plant->b_IsReachTarget )//到达目标点
{……//投放
UUV->Send();
}
if( UUV->m_bUnderWater )//潜艇开始规避
sub->Update(m_dSimTime-m_dSearchTime );
L_endframe:
endFrame();
高空滑翔水下航行器的整个仿真过程由视景仿真程序完成。仿真程序首先对视景仿真系统进行配置,这一过程通过调用acf.文件来实现。然后再调用Vega Prime提供的API函数驱动模型完成仿真任务。动态仿真通过Vega仿真应用程序来实现。通过编写程序,还可以实现观察模式,利用键盘操作实现观察角度的随意变化,从而达到人机交互的目的。
5 仿真实现与结果分析
根据某型水下航行器的总体参数和滑翔水下航行器运动控制数学模型,计算控制参数,得到弹道分析的前置处理原始数据,在本系统构建的视景仿真系统上进行高空滑翔水下航行器的弹道模拟控制和弹道分析的仿真实验。实验中,设定高空滑翔水下航行器的投放高度为6000m,初始速度为速度280m/s。滑翔段固定俯仰角为12°,到达近海面时突防高度为50m。通过本系统构建的仿真平台,得到空投滑翔水下航行器的全弹道运行视景效果图如图3所示。图3显示了仿真实现的水下航行器在空中滑翔、低空突防、滑翔翼脱离以及进入水下攻击等四个阶段的水下航行器运动弹道轨迹和视景实现,具有生动效果,符合现实实际,对展开后续科研及理论分析和模拟实验都具有重要意义和使用价值。水下航行器在攻击过程中的空间坐标全弹道曲线如图4所示。图4分别体现了水下航行器在滑翔段、低空突防段以及减速段的运行曲线坐标方位图,为分析空投滑翔水下航行器的运动轨迹提供了数据支撑。图5展示了滑翔水下航行器在空中运行过程中全弹道俯仰角曲线。所有弹道运行参数,都会在视景仿真平台中同步跟踪显示,研究成果为研究空投滑翔水下航行器的运行控制轨迹和弹道分析,展开科研实验具有重要价值。
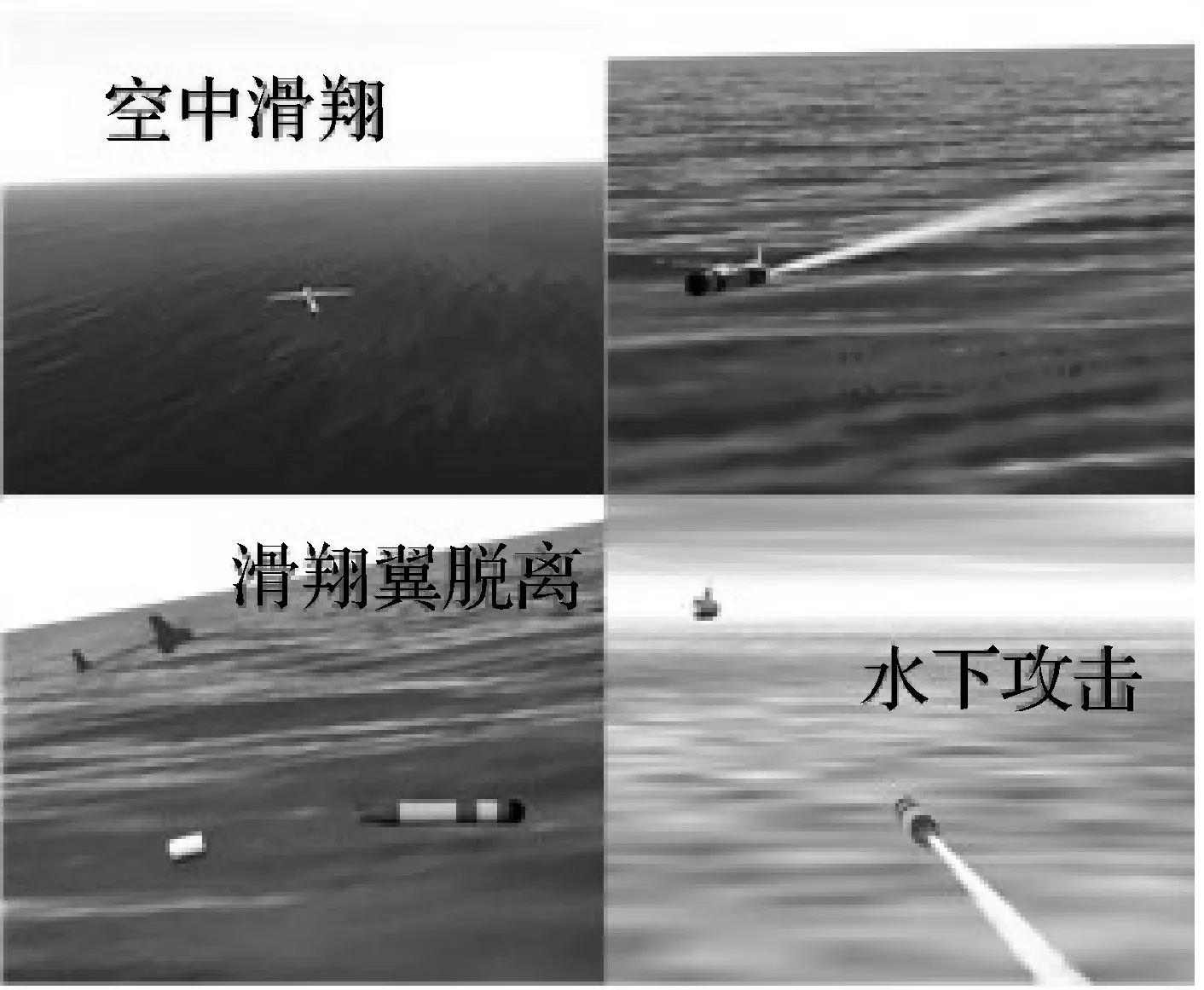
图3 水下航行器全弹道运行视景仿真效果
图4 攻击全弹道曲线
图5 空中全弹道俯仰角
6 结语
本文利用Matlab Simulink设计高空滑翔水下航行器的数字仿真系统,得到了基于全弹道控制分析的水下航行器攻击模型视景仿真系统。该系统能够展示高空滑翔水下航行器所需的场景,包含了系统设计部分的各个方面,并具有较强的真实感。弹道分析实验仿真效果表明,本文所建立的视景仿真系统解决了高空滑翔水下航行器视景仿真系统中的关键问题,实现了所需的特定功能,在保证实时性要求的前提下达到预期的视觉效果。通过仿真实现了水下航行器在空中滑翔、低空突防、滑翔翼脱离以及进入水下攻击等阶段的水下航行器运动弹道轨迹和视景仿真效果,视景效果与运动参数具有同步跟踪功能,不会再因局部模型快速变化和模型分离而失真,保证了实时性和有效性,平台搭建和系统的构建对展开后续空投水下航行器的科研模拟试验和理论分析都具有重要意义和工程应用价值。
[1] 王乘,李利军,周均清,等.Vega实时三维视景仿真技术[M].武汉:华中科技大学出版社,2005.
[2] 张礴,吕赟.基于DSP的水下航行器舵机控制系统设计[J].科学技术与工程,2011,11(14):3225-3228.
[3] 胡光波,周勇.基于Vega Prime的舰船尾流视景仿真研究[J].舰船电子工程,2010,30(6):91-94.
[4] 潘光,吴文辉,毛昭勇,等.高空远程滑翔全弹道仿真关键技术[J].水下航行器技术,2009,17(4):10-15.
[5] 耿维忠,谢步瀛,胡笳,等.基于Creator和Vega的视景仿真系统的研究与实现[J].东华大学学报(自然科学版),2010,36(4):356-359.
[6] 刘昊晨,梁红.线性调频信号参数估计和仿真研究[J].计算机仿真,2011,10(14):157-159.
[7] 张仪,陈迎春,曹海军.基于Vega的弹道视景仿真软件设计[J].舰船电子工程,2011,31(8):109-112.
[8] 钱康,王爱民.基于Vega的舰载捷联惯导虚拟平台的航迹仿真[J].计算机测量与控制,2012,20(2):424-427.
[9] 王瑞,马艳.基于分数阶傅里叶变换的线性调频脉冲信号波达方向估计[J].兵工学报,2014,35(3):421-427.
[10] 严昊平,徐友根,王亚昕,等.基于OpenGL的飞机航迹动态仿真[J].计算机与数字工程,2014,42(2):304-307.
[11] Alfaro V M, Vilanovab R. Robust tuning of 2DoF five-parameter PID controllers for inverse response controlled processes[J]. Journal of Process Control,2013,23(4):453-462.
Visual Simulation of UUV Attack Model Based on Whole Trajectory Control Analysis
GE Lizhi
(Kunming Shipborne Equipment Research and Test Center, Kunming 650051)
The visual simulation system of the high altitude gliding underwater vehicle(UUV) was researched and established accurately. The whole trajectory control was analyzed, and multimode attacking trajectory was realized in the simulation platform. Because the attitude angle of the gliding UUV changed quickly, and the background parameters were complicated, and the problem of rapid change part and separation of the model always existed. The method with combined using DOF and Switch node was proposed. The Matlab Simulink model was used to calculate the 6 DOF data and save the data through the "To Workspace" module. Then Vega application program was written by VC++ 6.0, with reading the motion parameters and using LOD technology which couldn’t reduce the display speed, the simulation visual effect was also improved. Simulation results showed that the system can simulate the whole trajectory and visual effect of UUV in multiple modes such as gliding in the air, low altitude penetration and underwater attack etc, and the control parameters can be updated synchronously. The visual simulation could never be distorted because of rapid change and separation. It had important value for further research and experiment of altitude gliding UUV.
gliding UUV, virtual reality, visual simulation, whole trajectory
2014年9月2日,
2014年10月30日
葛立志,男,硕士研究生,研究方向:水下航行体控制与试验。
TJ630.1
10.3969/j.issn1672-9730.2015.03.038
