多无人机协同作战系统运用方式研究*
2015-12-17黄克明
王 涛 胡 军 黄克明
(陆军军官学院 合肥 230031)
多无人机协同作战系统运用方式研究*
王 涛 胡 军 黄克明
(陆军军官学院 合肥 230031)
论文分析了多无人机协同作战系统的特点,基于Agent多智能单元系统理论提出了集中式作战体系、集散式作战体系和集群式作战体系等三种多无人机协同作战系统的运用方式。
多无人机; 协同作战; 运用方式
Class Number V279
1 多无人机协同作战系统的特点
多无人机协同作战系统是指由多架相互感知、相互协作的无人机构成,能够共同完成一定任务的系统。在多无人机协同作战系统中,这些无人机属于相同或不同的类型,它们在系统结构中担负着不同的角色。每架无人机只具有情报侦察、中继通信、电子干扰、目标指引、火力打击、毁伤评估等一种或者几种功能,根据各自所具有的局部信息和作战能力以及相互之间的通信来进行决策,协同执行作战任务。这些无人机组成的无人作战系统借助多种传感器相互感知,实时通信,进行协作和决策,能够完成单架无人机无法完成的任务涌现性行为,表现出优越的整体作战效能。
多无人机协同作战系统力求通过多架无人机之间的相互协同,使多无人机系统作为整体的作战能力大于各架无人机所具有的作战能力的简单相加。其主要特点表现如下:
1) 协作性:系统中的各架无人机可以相互协作,执行单架无人机无法完成的任务。
2) 并行性:系统可通过各架无人机之间的异步并行活动,提高系统内部的情报获取能力、信息感知能力和辅助决策能力。
3) 健壮性:系统并不依赖于某架无人机完成所有的作战任务,不会因为某一架无人机的损伤或者退出而导致系统瘫痪。
4) 易扩展性:系统松散耦合的特征,保证了其体系构成的可重用性和可扩充性。
5) 自适应性:系统中各架无人机能够随环境的变化调整自己的飞行路径,并且与其他友邻无人机进行通信和协作,彼此之间保持安全距离,始终保持系统资源的最优化配置[1]。
2 Agent多智能单元系统理论
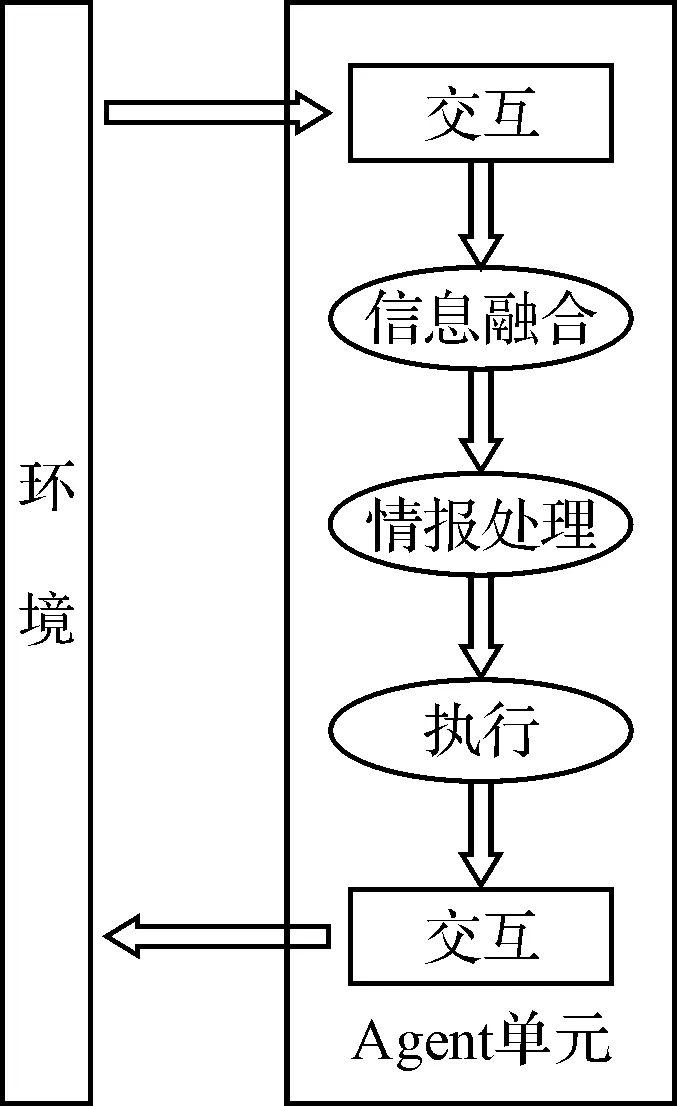
图1 Agent智能单元工作流程
Agent作为智能控制单元,决定了Agent的行为必然体现在推理上,其工作流程如图1所示。Agent通过信息交互来感知环境,获取环境的状态信息。感知到的信息首先要以适当的方式进行信息融合,并能为Agent的知识库所接受。情报处理的目的是提取可用的情报数据,根据Agent的预期目标决定下一步的具体行动。当要求对环境交互时,执行模块将控制和使用合适的交互模块完成对环境的影响[8]。
Agent多智能单元系统的体系结构主要有集中式控制系统、分布式控制系统、集散式控制系统等三种体系结构。
集中式控制系统的特点是有唯一的中央控制节点。这种结构的优点是,可以降低系统的复杂性,减少Agent间相互通信产生的大量数据;缺点是,对主控Agent的要求很高,如果系统中各Agent的行为比较复杂,或者Agent的数目比较多,那么得出一个全局一致的行为规划是非常困难的。因此,这种结构不适合动态、开放的环境,只适于规模不大、环境相对明确的系统。
分布式控制系统的特点是可扩展性强,可以充分发挥各Agent的自治能力;缺点是,通信量大,它要求各Agent有较强的自适应能力或通信能力,适用于规模大、通信基础设施和技术容易实现的系统。
集散式控制系统的特点是具有一定的智能化程度。随着技术的进一步发展,当无人机之间能够实时交互并协同控制任务时,可以将集中式控制系统和分布式控制系统有机地结合起来,弥补彼此的缺点,突出双方的优点,采用集散式控制系统体系结构。
3 多无人机协同作战系统运用方式
3.1 集中式多无人机协同作战体系
3.1.1 集中式多无人机协同作战体系结构
集中式体系结构下的多无人机协同作战,多机协同主要表现为地面站对无人机的任务控制,即地面站在无人机任务执行过程中对其飞行、通信、载荷和任务等多个层面进行有效监管、指挥和控制。
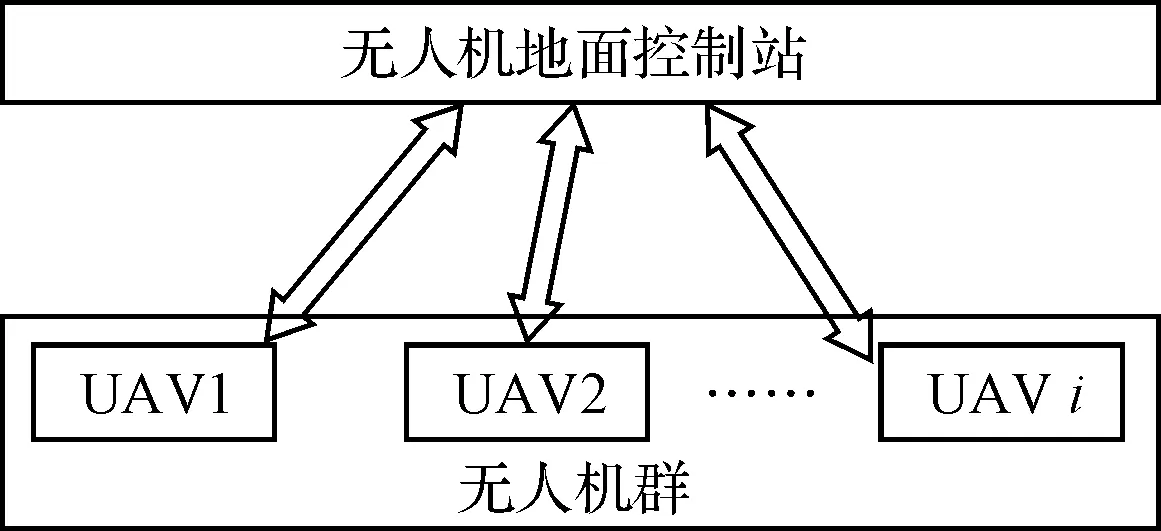
图2 多无人机协同作战集中式体系结构
如图2所示,地面站和无人机之间具有良好的互连、互通、互操作能力,地面站能够传输作战指令、控制命令给无人机,必要时还可以控制无人机的飞行。同时,无人机能够将情报数据、态势信息和任务状态信息及时反馈给地面站,这些信息交互可以按时间间隔自动发起,也可以由地面站根据需要随时发起。当无人机探测到突发威胁时,需要将威胁情报通知地面站,地面站进行航路调整和发布变更无人机任务指令。
3.1.2 集中式多无人机协同作战体系的特点
集中式多无人机协同作战体系的特点是无人机群通过数据链由地面站进行控制。在这种体系结构下,无人机之间没有通信联系,来自各架UAV的探测信息和系统状态信息汇集到地面站,经地面站分析决策、集中计算与统一规划后,将求解结果以控制指令的形式发送给各UAV执行。在这种体系结构中,任务控制功能集中在地面站,UAV仅具有底层控制功能,因此对各无人机平台决策能力要求相对较低,而对地面站决策能力要求较高[9]。
集中式控制能够从全局对问题进行求解和优化,但在实际作战应用中存在以下不足:
1) 需要UAV不断将自身状态与探测到的信息传送到地面站,这对通信链接的可靠性和通信带宽提出很高要求。
2) 所有的信息融合、辅助决策集中在唯一的中央节点—地面控制站,计算量大,求解复杂度高,对于大规模复杂问题消耗的时间长,并且常难以找到最优解。
3) 系统缺乏健壮性,中央节点是整个系统的“瓶颈”,如果该节点出现故障、遭到损毁或受到干扰,将导致整个系统的崩溃。
3.2 集散式多无人机协同作战体系
3.2.1 集散式多无人机协同作战体系结构
由i架UAV构成分布式控制体系,再通过地面站与各UAV之间建立联系,形成集中式控制体系,地面站与无人机群就形成了集散式体系结构,如图3所示。每一架UAV在任务执行过程中从自身局部利益出发,根据环境信息和自身状态对当前的任务计划进行评估,如果发现了更有利于自身的规划,把新的规划结果提交给地面站,由地面站对每架UAV的提议进行总体评估,如果提议能获得更好的系统整体效能,则该提议被采纳,否则不予采纳。同时,地面站适时监控各架UAV,可以随时对各UAV发布指令,进行操控。在没有接收到地面站发出的指令的情况下,无人机在分布式体系结构下工作。
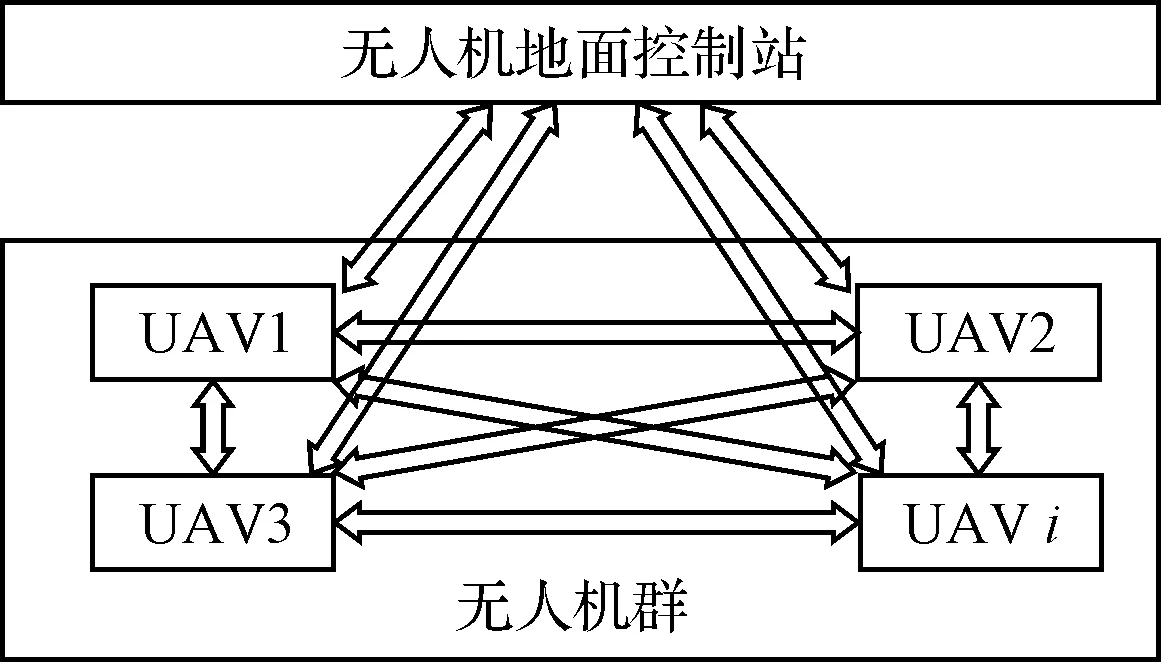
图3 多无人机协同作战集散式体系结构
在这个体系结构中,地面站系统的功能与集中式体系结构中的地面站系统的功能相同。当系统中的无人机平台与地面站进行交互时,接收地面站发布的指令,操控本机;当地面站中断与无人机的联系时,无人机群之间通过信息交互,进行协同决策,对无人机进行操控[11]。
3.2.2 集散式多无人机协同作战体系的特点
集散式多无人机协同作战体系的主要特点是集中管理操作和分散控制调节。
集散式控制系统采用自治和协作的方法来解决全局控制问题,将复杂问题分解为能够由系统中各个节点解决的子问题,然后由各节点进行联合求解。如图3中所有UAV彼此间是完全平等的关系,它们之间构成分布式体系结构。UAV之间可以直接进行通信,这种结构可扩展性强,能够充分发挥各UAV的自治能力;缺点是相对于集中式体系结构中的无人机,每一架无人机的通信量都较大,它要求系统中的每一架无人机都有较强的自适应能力和通信能力。
3.3 集群式多无人机协同作战体系
基于减少协同作战体系中地面站与无人机群、无人机与无人机之间的交互次数的原则,多无人机协同作战系统可以采用集群式作战体系结构。
3.3.1 集群式多无人机协同作战体系结构
以n架无人机协同作战为例,将n架无人机尽可能平均地随机分成i组,每一组成员之间构成完全分布式体系结构,从每组成员中随机选取一架无人机作为该组的组长,各组长之间又构成分布式体系结构。无人机之间信息交互的一个周期为:首先,各组组员之间进行信息交互,然后各组组长之间进行信息交互,最后各组组长把所获取的信息通知给各组组员。在各架无人机之间进行交互的过程中,地面站和无人机群中的其中一架无人机进行信息交互便可以知道整个无人机群的信息。以9架无人机协同作战为例,根据以上设想,建立如图4所示的集群式多无人机协同作战体系结构。
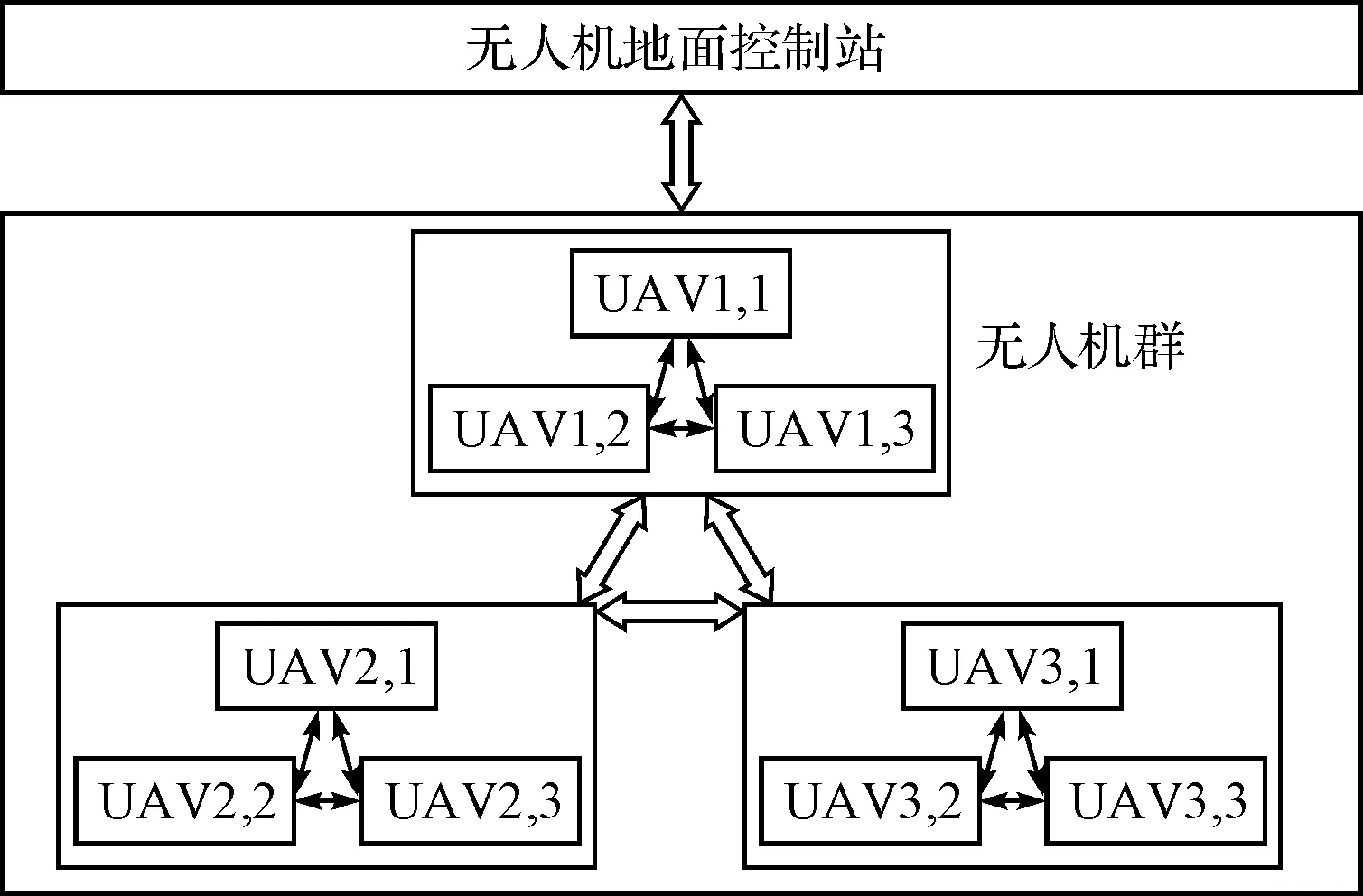
图4 多无人机协同作战集群式体系结构
3.3.2 集群式多无人机协同作战体系的特点
集群式多无人机协同作战体系的特点是具有较强的信息交互能力、相互协同能力和自主决策能力,主要包括以下几个方面[7]:
1) 通信链路能够满足通信需求,即地面站与无人机之间、无人机与无人机之间能够进行正常的信息交互。
2) 支持无人机群作战体系的动态重构。当系统中有无人机因故障或损毁退出,或有另外的无人机增援时,或任务状态发生变化时,多无人机系统的体系结构能够及时进行调整以便更好地完成任务,整个系统是一个开放的、可伸缩的系统。
3) 支持动态的无人机任务分配。由于战场态势瞬息万变,单架无人机以及由几架无人机组成的小组所要完成的任务也可能会随时间发生变化,这就需要地面站与无人机群进行协同任务规划,重新分配任务,最大限度地保证任务目标的实现。
4) 支持无人机群的自组织。由于操作员数量有限,并且无人机与地面站之间可能会出现通信中断,无人机群具有自组织能力。
5) 支持地面站操作人员与无人机、无人机群的交互。虽然无人机具有自主决策能力,无人机群能够自组织,但是某些特殊情况下,它们还不能保证能够应付所有的突发事件。另外,无人机的某些关键操作,例如,实施火力打击,可能还需要得到操作人员的授权和确认。
4 结语
面向日趋复杂的现代战场环境和战术任务,单架无人机将很难完成指定的作战任务,以无人机群协同作战将是未来空战的一种必然趋势。集中式作战体系、集散式作战体系、集群式作战体系等三种多无人机协同作战系统运用方式分别适用于不同条件或不同时期。随着无人机的各项关键技术的发展(数据链、传感器、计算机、Agent),首先能够实现多无人机协同作战的集中式体系结构。在集中式作战体系中,系统对无人机平台的通信能力、智能化程度要求较低(相对于集散式作战体系中的无人机),系统的控制结构比较容易实现。随着技术的进一步发展,无人机上的通信能力、自主决策能力能够满足多机协同的需求,无人机之间可以实时交互并能协同控制任务时,无人机群的协同作战便可以采用集群式体系结构。
[1] 黄长强,等.多无人机协同作战技术[M].北京:国防工业出版社,2012:193-210.
[2] 赵继臣.陆军武器装备作战运用研究概论[M].北京:解放军出版社,2010:1-6.
[3] 诺曼·弗里德曼.无人空中作战系统[M].北京:国防工业出版社,2011:120-135.
[4] 胡晓峰,等.战争复杂系统建模与仿真[M].北京:国防大学出版社,2009:69-78.
[5] 朱永贤,等.异构多无人机[M].北京:国防工业出版社,2012:14-25.
[6] 沈林成等.多无人机自主协同控制理论与方法[M].北京:国防工业出版社,2013:271-276.
[7] 魏瑞轩,李学仁.无人机系统及作战使用[M].北京:国防工业出版社,2009:161-172.
[8] 马巧云.基于多Agent系统的动态任务分配研究[D].武汉:华中科技大学,2010:23-46.
[9] 钟咏兵.UCAV群空战协同战术决策研究[D].西安:空军工程大学,2011:71-86.
[10] 傅裕松.有人机-无人机群协同空战研究[D].西安:空军工程大学,2011:113-121.
[11] 刘跃峰,等.有人机/无人机编队协同任务分配方法[J].系统工程与电子技术,2013,32(3):59-71.
Application Modes of Cooperative Combat for Multi-UAVS System
WANG Tao HU Jun HUANG Keming
(Army Officer Academy, Hefei 230031)
In ths paper, the characteristics of cooperative combat for multi UAVS system, are analyzed, and three kinds of application modes of cooperative combat for multi-UAVS system, including centralized combat system, distributed combat system and cluster combat system, are put forward based on the theory of multiple Agent unit system.
multi UAVS, cooperative combat, application mode
2014年9月7日,
2014年10月29日
王涛,男,博士研究生,讲师,研究方向:无人机技术与作战运用。胡军,男,博士,副教授,硕士生导师,研究方向:无人机技术与作战运用。黄克明,男,博士研究生,讲师,研究方向:无人机技术与作战运用。
V279
10.3969/j.issn1672-9730.2015.03.002
