单轨车辆主动悬架模型随机线性最优控制器设计
2015-12-16赵强,何法,王鑫,景园
赵 强,何 法,王 鑫,景 园
(东北林业大学交通学院,哈尔滨150040)
悬架是车辆的重要总成之一,能够传递车轮和车身之间的一切力和力矩,衰减由路面不平度产生的振动冲击[1]。常规的被动悬架内部没有能量供给装置,悬架刚度和阻尼只能适应一定的载荷和某些路面情况和车速,因此不同路面和载荷条件下车辆的平顺性等指标都不如参数可调悬架。
随着互联网技术的不断发展,河北省特色农产品网络营销将会逐渐成为主流销售模式。“互联网+特色农产品”销售模式同传统销售模式,具有相当明显的优势,因此,政府、农户、电商公司三者应形成合力,共同推进新模式发展,为河北打造农业强省奠定重要基础。
主动悬架装有主动作动器,能够根据输入参数产生最优的控制力,使悬架具有良好的减振性能,从而提高车辆的平顺性和接地性等性能。
主动悬架核心部分是控制算法,选择不同的控制算法和方式会产生不一样的控制效果。控制算法的种类有很多,比如PID控制、Fuzzy控制、Robust控制、滑模变结构控制、预测控制、遗传算法控制、神经网络控制和自适应控制等方法,但随机线性二次最优控制在主动悬架设计当中应用最为广泛[2]。
1 单轨车辆主动悬架模型
单轨车辆主动悬架模型如图1所示。
图1中,mb为车身质量,mwf,mwr为前后车轮质量,cf,cr为前后悬架减震器阻尼系数,ksf,ksr为前后悬架刚度系数,ktf,ktr为前后悬架刚度系数,J为车身转动惯量,uf,ur为前后悬架作动器控制力,a,b为前后悬架到车体质心的距离,xb为车体质心垂直位移,xbf,xbr为前后悬架垂直位移,xwf,xwr为前后轮胎垂直位移,xff,xrr为路面激励输入,θ为车体俯仰角,v为车速。

图1 单轨车辆主动悬架模型Fig.1 Monorail vehicle active suspension model
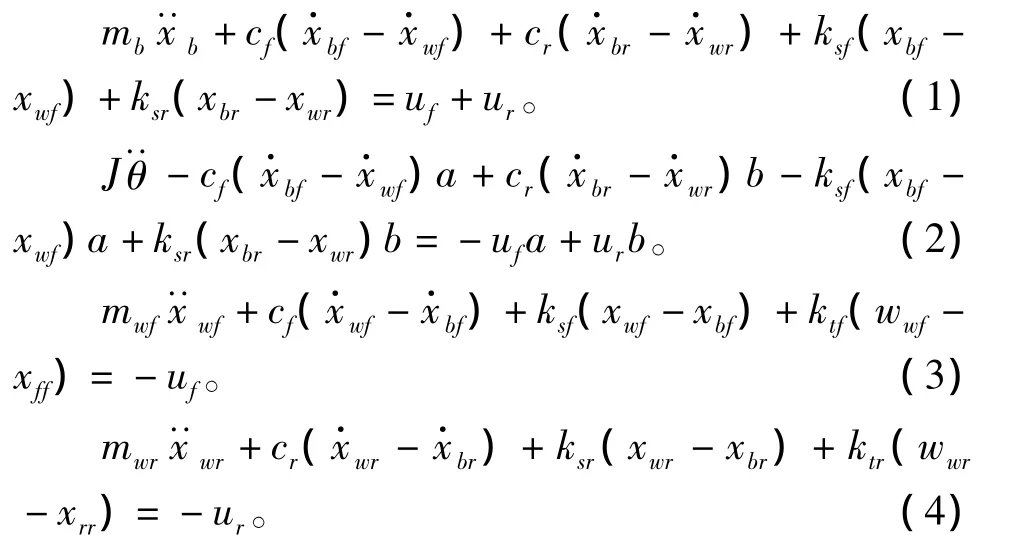
根据达朗贝尔原理可以推出单轨车辆主动悬架系统动力学的相关微分方程[3]:
式中:K为最优控制反馈增益矩阵,P可由Riccati(黎卡提)方程求出[7]:

后悬架位移与车体质心位移和俯仰角之间的关系式:

采用积分白噪声的时域表达式为路面输入模型,则前后轮的路面输入方程为[4]:

取性能指标的加权系数p1=1,p2=1,q1=80 000,q2=100,q3=80 000,q4=100。根据二次型性能指标的线性系统最优控制理论,可以得到悬架系统的最优控制规律为[6]:
58到家含着金钥匙,那是过去,而且也不是说含着金钥匙就一定成功,含着金钥匙失败的案例更多。创业不成功更符合逻辑,成功才是偶然。58到家从成立第一天开始就比较独立,很多投资人也是58到家的团队一个一个找来的,而不是像外界说的先找投资人再做事情。投资人投资58到家,是因为58到家的团队以及58到家领先的地位。
取状态变量:

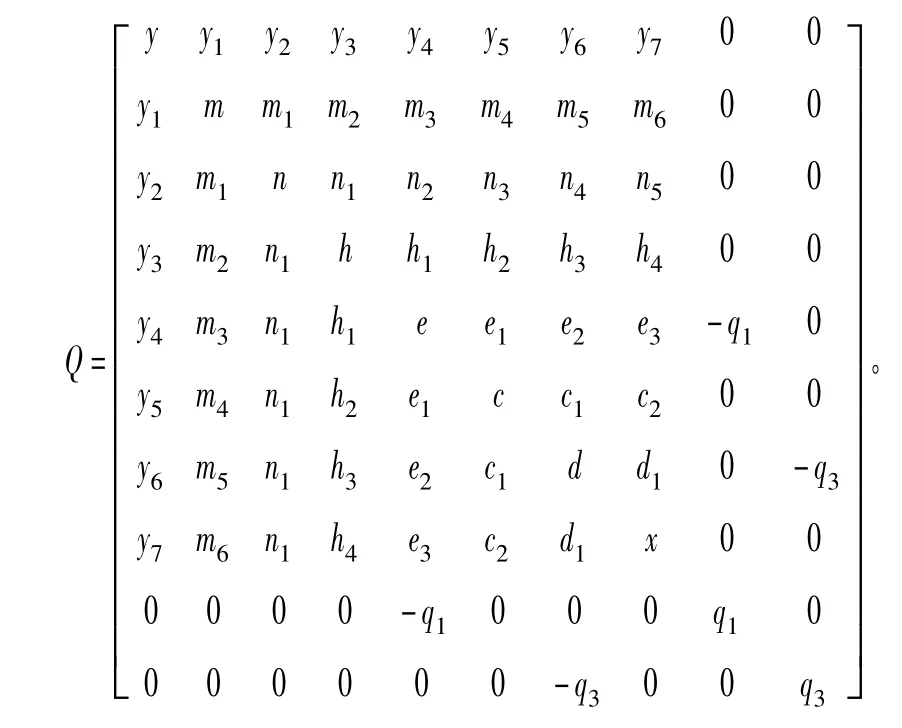
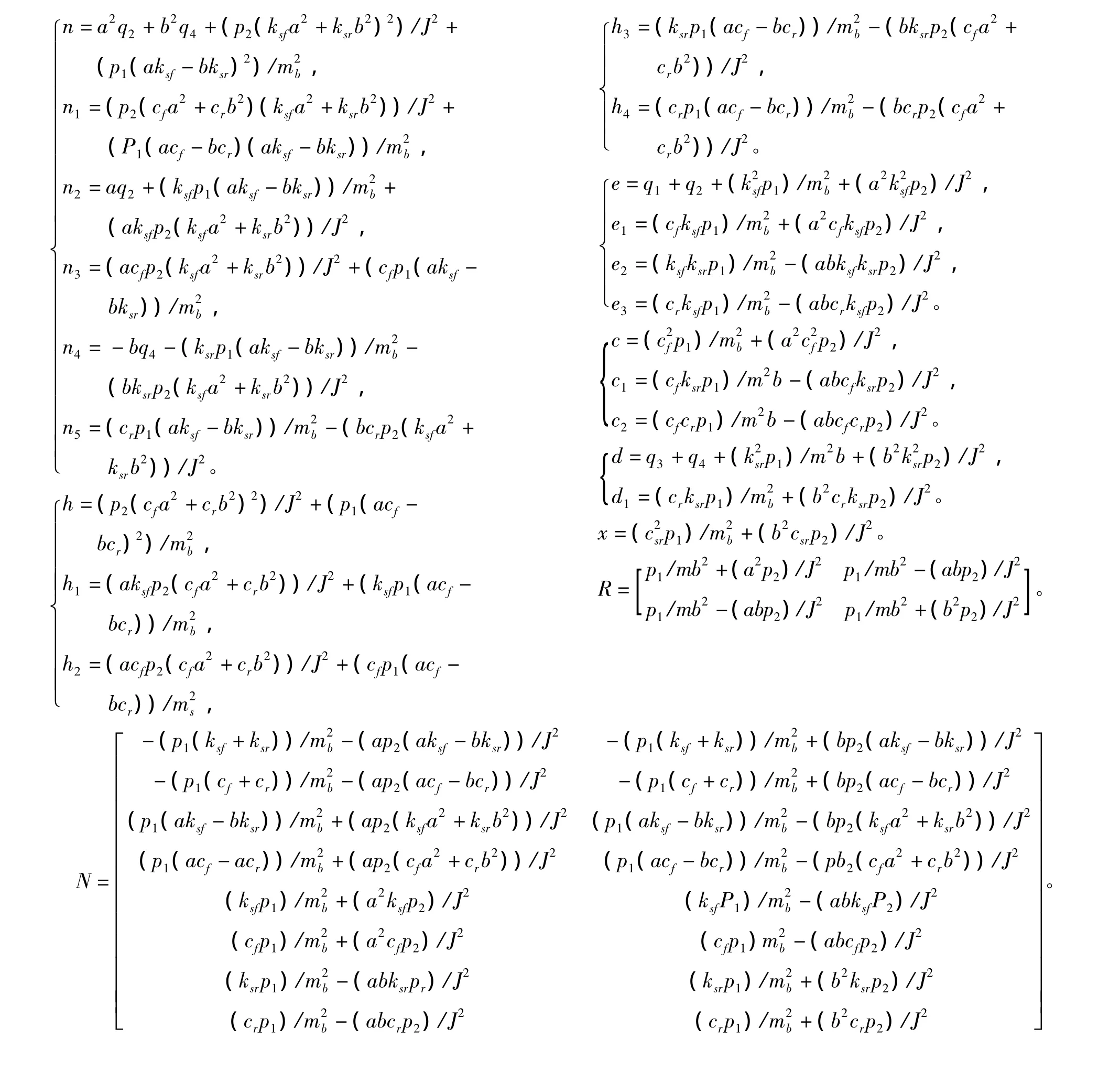
式中:X、U分别为前述状态变量和控制输入矩阵;Q为状态加权正定矩阵;R为控制加权正定矩阵;N为控制和状态的加权矩阵;q=diag(p1,p2,q1,q2,q3,q4)。
蒋介石:《中国之命运》,《先总统蒋公思想言论总集》,(台湾)“国民党中央党史会”1984年版,第4卷,第46、47页。

则系统状态方程为

式中:U为控制输入矩阵,U=[uf,ur]T;W为白噪声矩阵,W= [wff,wrr]T。

选取福特Granada轿车为研究对象,其单轨车辆模型仿真参数及符号见表1。
与公式(9)相比较可求出Q=CTqC、R=DTqD和N=CTqD。
重度POP手术治疗目的为缓解临床症状、重建正常阴道解剖、恢复阴道功能及防止复发。阴式子宫切除+阴道前后壁修补术通过切除脱垂的子宫及部分阴道黏膜组织,通过韧带悬吊修补脱垂的盆腔,从而缓解临床症状。该术式住院费用较低,术后短期效果较好,多年来被视为经典的POP手术方式。但由于该术式切除了子宫这一女性标志性器官,容易对女性产生心理创伤。由于破坏了正常的盆底结构,手术损伤较大,而且未起到加固盆底的作用,术后复发率较高,因此长远来看并未明显改善患者的身心健康[9]。
式中:
总之,种子具有有性繁殖特点,基于对种子形态特征的分析,研究其与植被恢复、演替之间的关系。植被演替也给予种子的生产以及散布而形成,种子形态对植被的传播能力具有重要的影响。基于生物学、生态学角度分析种子特征对植被恢复造成的影响,阐述植被恢复演替的干扰性因素,对于促进植物学的发展具有重要意义。

2 LQG控制器设计
汽车悬架设计中平顺性的主要性能指标:代表乘坐舒适性的车体质心垂直振动加速;影响车身姿态且与结构设计和布置有关的悬架动行程;代表轮胎接地性的轮胎动位移[5]。因此,LQG控制器设计中的性能目标指标J要包含轮胎动位移、悬架动挠度和车身加速度等指标,表达式如下:
烘干衣物的生活方式源自西方发达国家,由于健康、便捷、省时,近几年逐渐被我国消费者所接受,但目前主要聚集在高端市场。作为导入期的品类,线下在产品体验等方面具有天然优势,销量上更胜一筹。随着消费者对干衣机、洗烘一体机的了解、接受度提高,干衣市场可望迎来快速成长。
变化比较明显的有几个品类。一是经济类,由1978年的261种,占年度图书出版的1.9%;增加到2017年的24564种,占年度图书出版的7.38%,数量增长了94倍。二是环境科学、劳动保护科学(安全科学)类,由1978年的25种,占年度图书出版的0.18%;增加到2017年的1806种,占年度图书出版的0.54%,数量增长了72倍。三是农业科学类,由1978年的508种,占年度图书出版的3.71%;到2017年的3751种,占年度图书出版的1.13%,所占比例下降明显。图书出版种类比例的变化,反映了我国社会逐步从农业大国向经济大国的转型。

式中:p1为车身加速度加权系数,p2为俯仰角加速度加权系数;q1,q3为前后轮胎动位移的加权系数;q2,q4为前后悬架动挠度的加权系数。
公式(8)经过矩阵变换可得:

取输出变量:
二次型性能指标表达式:

Y=CX+DU。
其中:

系统输出方程为
如,在学习万有引力定律的时候,就可以结合苹果落地的故事引导,在幽默的故事中,引导学生要形成认真观察的好习惯。再如,在学习自由落体运动的时候,我们也可以引入比萨斜塔实验。同时,结合伽利略推翻亚里士多德“物体下落速度和重量成比例”定律的故事,激发学生的兴趣,并鼓励学生质疑,从而活化学生的思维,丰富教学的内容。此外,在高中教材中还包含很多的名人轶事,教师要学会运用,通过这些故事引导学生,从而调动学生积极性,提高教学的有效性。

表1 车辆模型仿真输入参数Tab.1 Parameters of vehicle simulation model
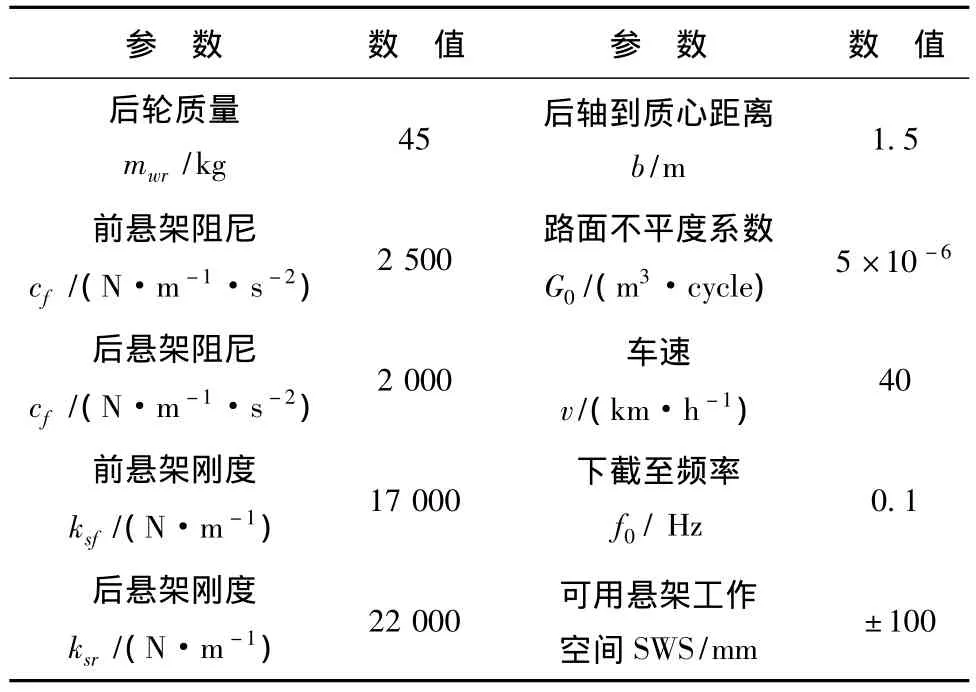
续表1 车辆模型仿真输入参数Tab.1 Parameters of vehicle simulation model
式中:G0为路面不平度系数;f0为下截止频率,wff,wrr为均值为0,强度为1的高斯分布白噪声。高斯白噪声。

前悬架位移与车体质心位移和俯仰角之间的关系式:

求出K后,即可得到闭环系统的状态方程[8]:

调用MATLAB的线性二次最优控制器设计函数 [K,S,E] =LQR(A,B,Q,R,N),求出反馈增益矩阵[9]:

则最优控制作用力为

3 数值仿真及结果分析
在Matlab软件的Simulink模块中建立单轨车辆主动悬架模型,如图2所示。
选取某神经精神病医院收治的心肌缺血患者80例,将患者随机分两组,治疗组和对照组。其中治疗组40例,男24例,女16例,年龄38~80岁,平均(62.5±8.2)岁,病程3个月~12年,平均(5.2±2.3)年;对照组40例,男26例,女14例,年龄40~79岁,平均(63.1±7.5)岁,病程4个月~11年,平均(4.3±1.7)年。两组患者的年龄、性别和病程长短比较;差异无统计学意义(P>0.05)。
根据已建立的模型和算法以及参数,在Matlab/Simulink中进行仿真,并将LQG控制的主动悬架和相应的被动悬架进行比较,仿真结果如图4~图6所示。

图2 单轨车辆主动悬架模型Fig.2 Model of monorail vehicle active suspension

图4 质心加速度俯仰角加速度控制效果对比曲线Fig.4 Contrastive curves of accelerator and pitching angle acceleration

图5 前、后悬架动挠度控制效果对比曲线Fig.5 Contrastive curves of front and rear suspension dynamic deflection
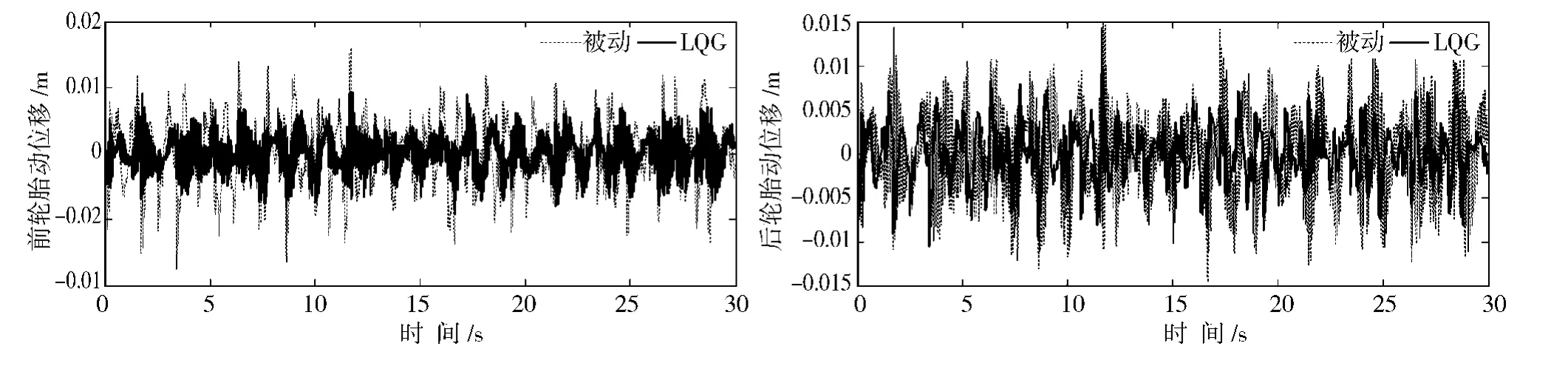
图6 轮胎动载荷控制效果对比曲线Fig.6 Contrastive curves of front and rear dynamic load of tyre
在MATLAB中可以进行定量分析,计算均方根值并进行比较,其结果见表2。
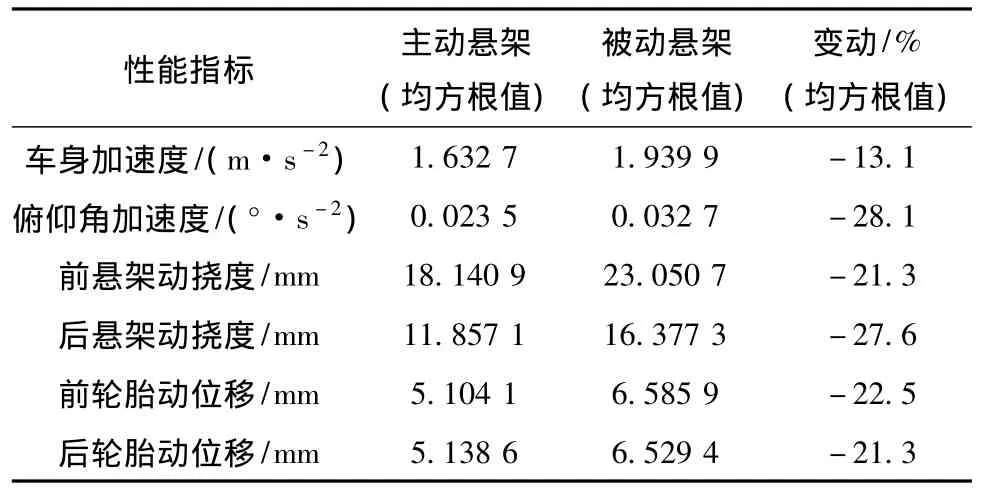
表2 主被动悬架性能指标比较Tab.2 Active and passive suspension performance
由以上图表可以看出,带有LQG控制器的单轨车辆主动悬架性能对比于相同参数的被动悬架性能有明显的改善,质心加速度、俯仰角加速度、前后悬架动挠度和前后轮胎动位移的最大值和均方根值都有所减小。
4 结论
通过对福特Granada轿车主动悬架和被动悬架进行仿真对比,采用随机线性最优控制的主动悬架能够使质心加速度、俯仰角加速度、前后悬架动挠度和前后轮胎动位移的最大值以及均方根值都有所减小,进而改善车辆的行驶平顺性、乘坐舒适性和操纵稳定性。对于参数和结构不同的悬架,可以通过改变悬架性能指标的加权系数,来获得相应的最优控制器。
[1]夏均忠,马宗坡,方中雁,等.汽车平顺性评价方法综述[J].噪声与振动控制,2012,32(4):9-13.
[2]桑 楠,魏民祥,白 玉.基于随机线性最优控制的汽车主动悬架控制器设计[J].郑州大学学报,2012,33(3):56-60.
[3]张海涛,高 洪,查为民,等.具有LQG控制器的主动悬架半车模型动力学分析与仿真[J].安徽工程大学学报,2012,27(3):42-45.
[4] Bakhtiari-Nejad F,Karami-Mohammadi A.Active Vibration Control of Vehicle with Elastic Body Using Model Reference Adaptive Control[J].Journal of Vibration and Control.1998,4(4):463-479.
[5]陈 克,高洁净,吕周泉.基于虚拟试验场技术的汽车平顺性仿真分析[J].中国工程机械学报,2010,8(2):208-212.
[6]刘小斌,崔小金.基于LQG控制器的主动悬架系统设计与仿真[J].兰州理工大学学报,2014,40(1):33-36.
[7]潘志鹏.汽车空气悬架系统的最优控制研究[D].哈尔滨:哈尔滨理工大学,2009.
[8]柴 牧,董恩国,李振兴.汽车主动悬架控制策略的研究[J].中国制造业信息化.2012,41(21):102-105.
[9]张德丰.MATLAB/Simulink建模与仿真实例精讲[M].北京:机械工业出版社,2010.