基于ADAMS的林间运输机半主动悬架设计及振动分析1
2015-12-16任长清
战 丽,李 季,任长清
(东北林业大学机电工程学院,哈尔滨150040)
目前林间运输机的运输舱与底盘之间通常为刚性连接,即采用无悬架结构。这种无悬架结构普遍存在震动幅度大和平顺性差等问题。尤其在道路状况的多变、复杂性的前提下,使得林间运输精密仪器难以满足平顺性的要求。为了解决这一问题,在驾驶舱与履带底盘中间加入悬挂系统,使其为弹性连接,以增强运输舱的平顺性,改善精密仪器及脆弱货物的运输环境。如图1所示。[1-2]

图1 履带式林间运输机总图Fig.1 Structure of transport machine in woodland
1 悬架类型的选择
传统的履带小型运输机普遍采用无悬架结构。同类型轮式林用机械采用传统被动悬架。被动悬架的刚度和阻尼是按经验或优化设计的方法确定的。根据这些参数设计的悬架结构,在汽车行驶过程中的性能是不变的,也是无法进行调节的。在林间路况复杂多变的情况下,这使运输机的行驶平顺性受到严重的影响。全主动悬架就是根据汽车的运动和路面状况,适时地调节悬架的刚度和阻尼,使其处于最佳减震状态。而半主动悬架不考虑改变悬架的刚度,而只考虑改变悬架的阻尼,因此它是由无动力源且只有可控的阻尼元件组成。相对于被动悬架和全主动悬架,半主动悬架具有一系列优点:可以根据路况适时改变阻尼,平顺性较被动悬架有显著提高;半主动悬架系统无单独动力源,不消耗机器的动力;结构简单,成本远低于全主动悬架;机构稳定,可靠性高。因此应选用半主动悬架。[3]
2 减震系统概述
2.1 振动系统分析
半主动悬架的设计应从行驶平顺性和操控性出发。但林间地形多变,因此弹簧刚度和减振器的阻尼系数应能随运输机运行状态而变化,使悬架系统性能总是处于最优状态附近。但是,弹簧刚度选定后,又很难改变,因此从改变减振器阻尼入手,将阻尼分为两级,根据传感器信号自动选择所需要的阻尼级。

图2 振动系统结构简图Fig.2 Diagram of vibration system
图2为由外部电磁铁控制的减振器简图。为满足平顺性要求时,可选择打开阻尼器;运输机高速行驶时,可选择关闭阻尼器。无阻尼可提高运输机行驶操控性能,使其运行更稳定,但平顺性下降;高阻尼可降低系统自振频率,减少对机身的冲击,利于提高平顺性,但高速行驶使稳定性下降。
2.2 电子控制系统概述
半主动悬架的电控系统基本组成如图3所示。传感器将运输机行驶的路面情况和行驶速度及启动、加速、转向和制动等工况转变为电信号,输送给电子控制器,控制器将传感器送入的电信号进行综合处理,输出对悬架的阻尼进行调节的控制信号。[4]
为减少执行元件所需的功率,主要采用调节减振器的阻尼系数法,只需提供调节控制阀、控制器和反馈调节器所消耗的较小功率即可。可以根据路面的激励和机身的响应对悬架的阻尼系数进行自适应调整,使机身的振动被控制在要求范围之内。

图3 电控系统组成Fig.3 The electronic control system
3 悬架核心参数的计算和分析
3.1 悬架静挠度与刚度
在本设计中运输机空载质量约1.2 t,载重0.8 t,由于是履带行走系统,它区别于轮式行走机构,履带行走机构底盘有交好的整体性和较大的着地面积。出于履带底盘整体性的考虑,小型运输机采用前置悬挂,后悬铰接的结构。于是运输机前后方的震动不存在联系。因此,运输机的机身固有频率n可用下式表示。

式中:c为悬架的刚度,N/cm;m为悬架的簧载质量,kg。
当采用弹性特性为线性变化的悬架时,悬架的静挠度可用下式表示

式中:g为重力加速度,g=981cm/s2。将fc带入式(1)得到

由于运输机的行走环境较为恶劣,且速度不高,对操作稳定性要求不高,推荐前悬的频率为1.00~1.50 Hz。在选定偏频后,再利用(2)即可算出运输机满载时前悬的静挠度。
根据以上公式,取悬架频率为n=1.2 Hz,m=2000 kg。
算出静挠度:fc=25/n2=25 × (1.2)2=17.36 mm。
刚度c=mg/fc=(2000 ×981)/17.36=1.13 ×105N/cm。
3.2 减振器的设计
3.2.1 减振器的选取
考虑到林间路况的复杂多变,本机采用半主动悬架,不考虑改变悬架的刚度,而只考虑改变悬架的阻尼,因此它是由无动力源且只有可控的阻尼元件组成的。
本设计的半主动悬架分为有级式阻尼器,它是将悬架系统中的阻尼分为两级,根据爆振传感器的信号自动进行选择所需阻尼级。也就是说,可以根据路面条件和运输机的行驶状态,来调节悬架阻尼级,从而可提高运输机的行驶平顺性与高速时的行驶稳定性。[5]
3.3.2 相对阻尼系数 Ψ
在减振器的卸荷阀打开前,其中的阻力F与减振器振动速度v之间的关系为

相对阻尼系数δ=F/v,在中等冲击情况下取v=1.3cm/s。
运输机有阻尼以后,簧上质量是周期衰减振动,用阻尼系数Ψ的大小来评定振动衰减的快慢程度。Ψ的表达式为

式中:c为悬架系统的垂直刚度;ms为簧上质量。
可算出:相对阻尼系数δ=F/v=2000×9.81/1.3=1.5 ×104。

此处取 Ψ =0.5。
4 利用ADAMS进行振动分析
4.1 建立三维模型
通过SolidWorks 2012建立运输机履带底盘三维模型,然后导入ADAMS 2010(如图4所示)。
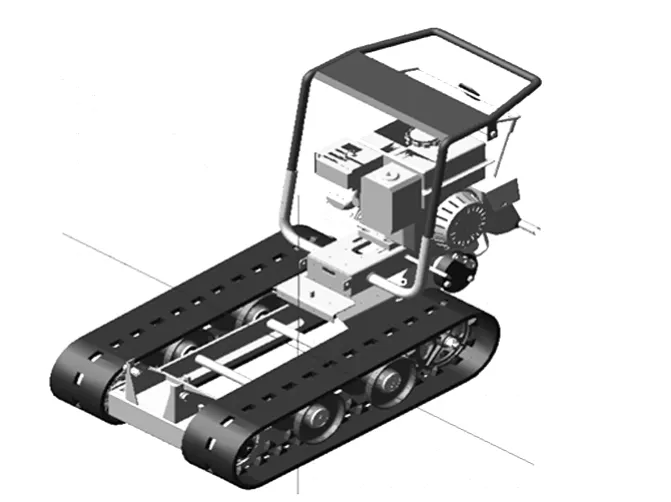
图4 运输机模型导入ADAMSFig.4 Input the model into ADAMS
4.2 完善模型并添加约束
底盘的模型基础上,在ADAMS中添加车兜,并添加各个部件的约束(如图5所示)。图中在运输机底盘前部添加两个弹簧减震器模型。约束类型:车兜与底盘为滑动副,只允许其在垂直方向相对运动。

图5 添加约束与减震器Fig.5 Add constraints and absorber
并将上文的计算参数输入弹簧阻尼器中(如图6所示)。

图6 将参数输入弹簧阻尼器Fig.6 Input the parameter into spring-absorber
4.3 创建振动系统激励信号
创建两个并行周期运转的凸轮,作为系统的输入信号,为运输机经过障碍的模拟信号(如图7所示)。然后将step函数作为输入信号赋值给Motion作为动力源。
STEP(time,0,0d,0.01,360d)+STEP(time,2,0d,2.01, -360d)。
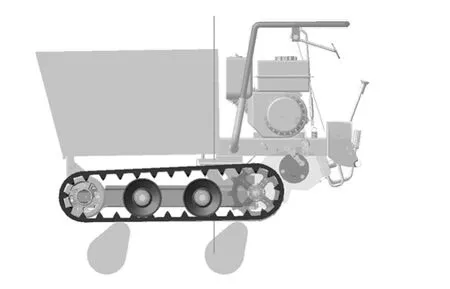
图7 添加系统激励源Fig.7 Add the motion
图8为系统输入信号的曲线图
图9为系统关闭阻尼情况下输入信号时机身的振动情况。图中实线为机身位移-时间曲线图,由于关闭阻尼器时机身相当于刚性连接,其曲线趋势与信号属于趋势相同;虚线为加速度-时间曲线图,该曲线是实线的2阶导数。
图10为打开阻尼器的情况,由图可见实线为位移-时间曲线图,其位移的波动范围明显小于阻尼关闭的情况。而实线的二阶导数曲线为加速度-时间曲线,在图中用虚线表示。
根据同时对比两种情况下的加速度曲线的最大值,在无阻尼时是打开阻尼器时的三倍。在质量不变的情况下,瞬时加速度的降低直接导致冲击力的减小,因此本悬架可有效的提高机身的平顺性,减小振动。

图8 激励信号曲线Fig.8 The pumping signal curve
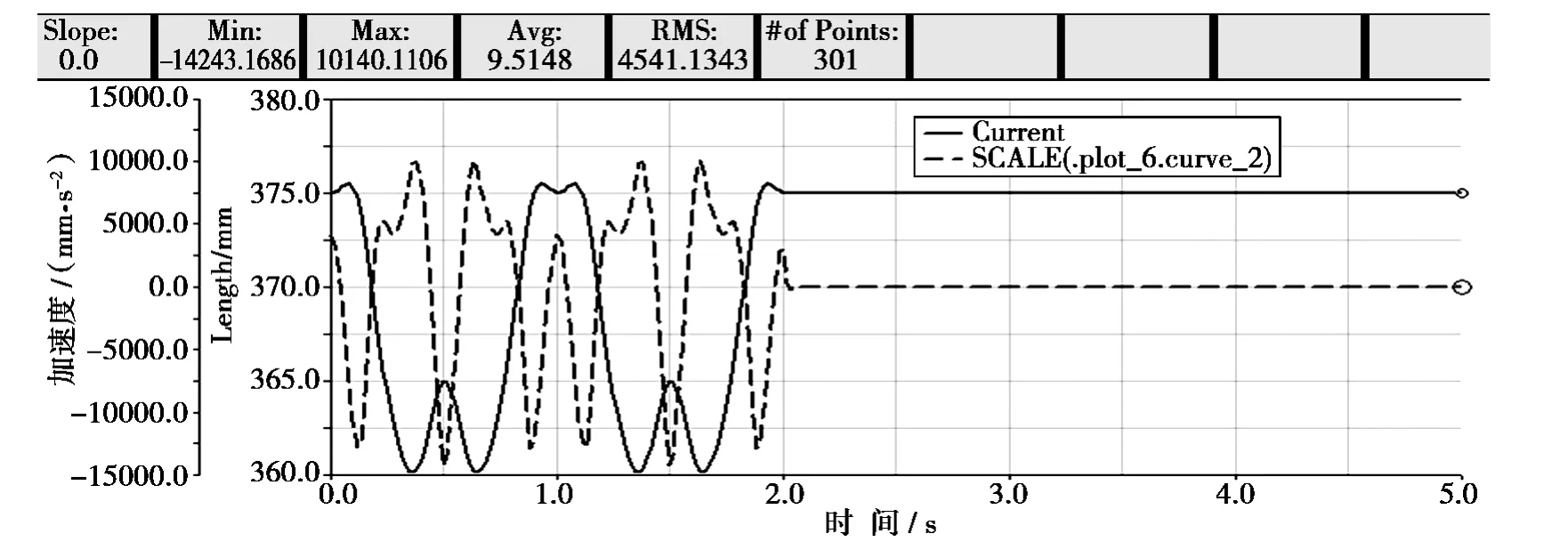
图9 无阻尼系统振动曲线Fig.9 The curve of vibrating system without damping

图10 高阻尼系统振动曲线Fig.10 The curve of vibrating system with damping
5 结论
本设计为现有林间运输机设计了半主动悬架。可变的减振器阻尼值能够较好的适应林间多变的路况,满足运输机的平顺性要求。在路面状况良好的情况下,关闭阻尼器,提高最大车速并且增加运输机的操控性与行驶稳定性;在林间路面状况复杂的情况下,打开阻尼器可以有效的衰减振动,减小冲击。并利用了ADAMS对其振动系统分析:较普通的刚性连接,本悬架可以减小大约三倍的冲击力,为林业研究中精密仪器的运输提供可靠环境。
[1]白 帆,白胜文,肖 冰,等.我国木材生产机械的发展(二)——集材机械[J].林业机械与木工设备,2013,41(2):18-21.
[2]冯 敏,王猛猛,陈 劭.基于虚拟样机技术的某轿车悬架性能仿真分析[J].林业机械与木工设备,2015,43(2):33-36.
[3]王其东,梅雪晴.汽车半主动悬架的研究现状和发展趋势[J].合肥工业大学学报(自然科学 版),2013,36(11):1289-1294.
[4]武云鹏,管继富,顾 亮.车辆半主动悬架自适应控制[J].兵工学报,2011,32(2):242-246.
[5]陈 杰,赵 强,孙 骁,等.1/4车辆半主动悬架的模糊控制研究[J].机电产品开发与创新,2014,27(2):17-18.