一种工业安全防护用二维激光安全扫描仪
2015-12-16李海明王振伟王学军吴兆迁孙玉宝刘德秋
李海明,王振伟,王学军,吴兆迁,孙玉宝,刘德秋
(济宁科力光电产业有限责任公司,山东 济宁 272000)
0 引言
1951年德国sick公司推出了第一个用于安全防护的安全光栅;1993年sick推出第一个基于脉冲激光测距原理、符合三级安全类别的区域扫描器,用于危险区域的防护。至今,有更多的厂家如Omron、Hokuyo、Leuze、Keyence等推出了类似的区域扫描保护装置。这些装置在各种复杂区域防护和移动危险区域防护(如移动机器人)得到了广泛应用。
我国工业安全防护产品起步较晚,且由于高精度脉冲激光测距实现难度大,至今尚未有类似的区域防护装置面世。目前国内在售的基于脉冲激光测距的定向测距传感器,测距精度基本在数十cm量级甚至米级。而国外产品均有专用芯片,测距精度可达到cm级别。
本文研究了一种基于脉冲激光测距、二维扫描的激光安全扫描仪,测距精度±6cm,达到国外产品水平,填补了国内产品空白。同时扫描区域半径最大4m、扫描角度190°,能可靠探测该区域内反射率低至1.8%、高至100%的物体,可通过上位机将扫描轮廓配置成任意形状。该扫描仪属于一类激光产品,对人眼安全,且符合标准IEC61496中type3电敏防护装置安全要求。
1 激光安全扫描仪概述
本文介绍的二维激光安全扫描仪内部有一个旋转扫描单元,通过旋转扫描单元发送周期性光脉冲,光脉冲遇到障碍物后返回传感器,传感器通过测量光往返时间确定当前角度的障碍物和传感器距离。所有角度位置的测距结果最终组成当前二维平面的环境轮廓。激光安全扫描仪可扫描角度190°,分辨率 0.36°。
2 高精度测距实现
本文研究的二维激光安全扫描仪采用下述关键技术完成激光飞行时间的准确测量,实现扫描区域内反射率1.8%~100%物体测距精度±6cm的效果。
2.1 激光发射
测距用脉冲式半导体激光器驱动电路模型如图1所示。为了实现高精度测距,需要发射激光脉冲具有窄脉宽、快速上升下降时间特性。因为脉宽越窄信噪比越高,测距精度越高[1]。从电路模型来看,高精度测距对放电回路的开关管开关特性有极高的要求。本文选用ns级别开关速度的射频mosfet,产生了上升下降时间1.5ns、半脉宽3ns的发射脉冲,为实现高精度测距奠定了良好的基础。
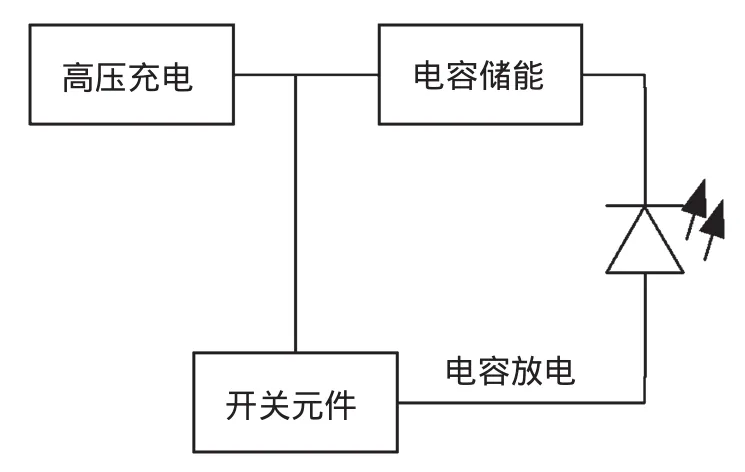
图1 激光器驱动电路模型
2.2 回波处理、时点鉴别、时间测量
由于目标物距离和反射物的变化,激光经目标漫反射返回后,回波能量动态范围变化很大,弱信号和强信号比率甚至达到1:10000以上,经过计算和测试1.8%反射率物体在4m处回波能量低至1μW以下,而强反射率物体(反射率100%)回波能量可达到1W以上。当回波能量过强时,放大电路输出信号将饱和失真。信号极大范围的动态变化,为准确鉴别回波时点带来很大困难[2]。
如果采用前沿时刻鉴别法[3],如图2所示,回波脉冲信号和固定阈值Vth比较,确定回波时点。由于回波信号幅值的变化,将引入计时误差△t。该误差至ns级别,1ns对应距离30cm,无法满足高精度测距要求。
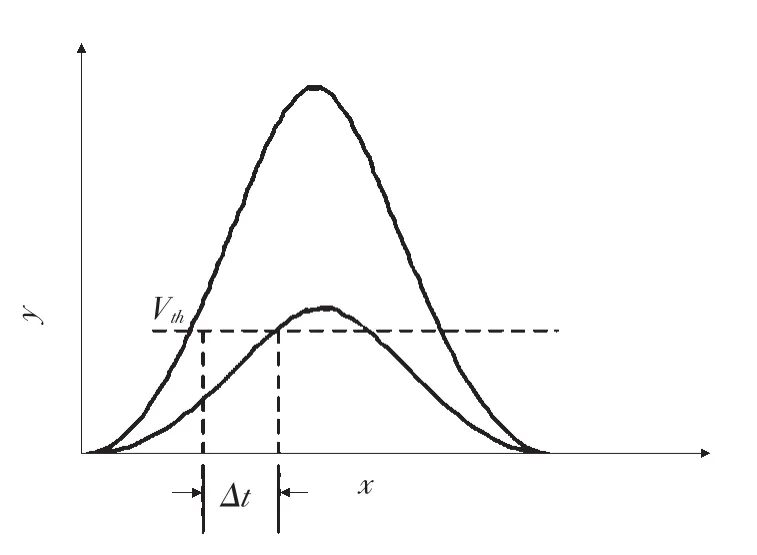
图2 前沿时刻鉴别示意图
本文采用自动增益控制和高通阻容时点鉴别相结合的方法,很好地解决了大动态范围回波信号的时点准确鉴别问题[4]。一方面对接收雪崩光电二极管APD和放大电路进行自动增益调节,避免信号饱和失真;另一方面采用高通阻容时点鉴别方法实现不同幅值信号的准确时点鉴别。高通阻容时点鉴别原理是,当脉冲信号经阻容微分电路后,原极值点转换为零点,且该过零点时刻不受输入信号幅值变化影响,可作为准确计时点。因为不同幅值脉冲信号的极值点时刻相同(上升时间相同)。
经过时点鉴别后,模拟信号转换为数字计时信号送入专用计时芯片完成飞行时间测量。本文采用ACAM公司专用计时芯片TDC-GPX,该芯片时间测量分辨率达27ps,对应距离0.81cm,可满足cm级别测距精度目标。
2.3 测距结果
经过试验验证,二维激光安全扫描仪实现了±6cm的测距精度。分别使用黑色灯芯绒(1.8%反射率)、灰色粗纸板(20%反射率)、反光板(90%以上反射率),在不同位置进行测距数据采集,并发送到上位机完成数据显示。抽取部分试验结果,如表1所示。
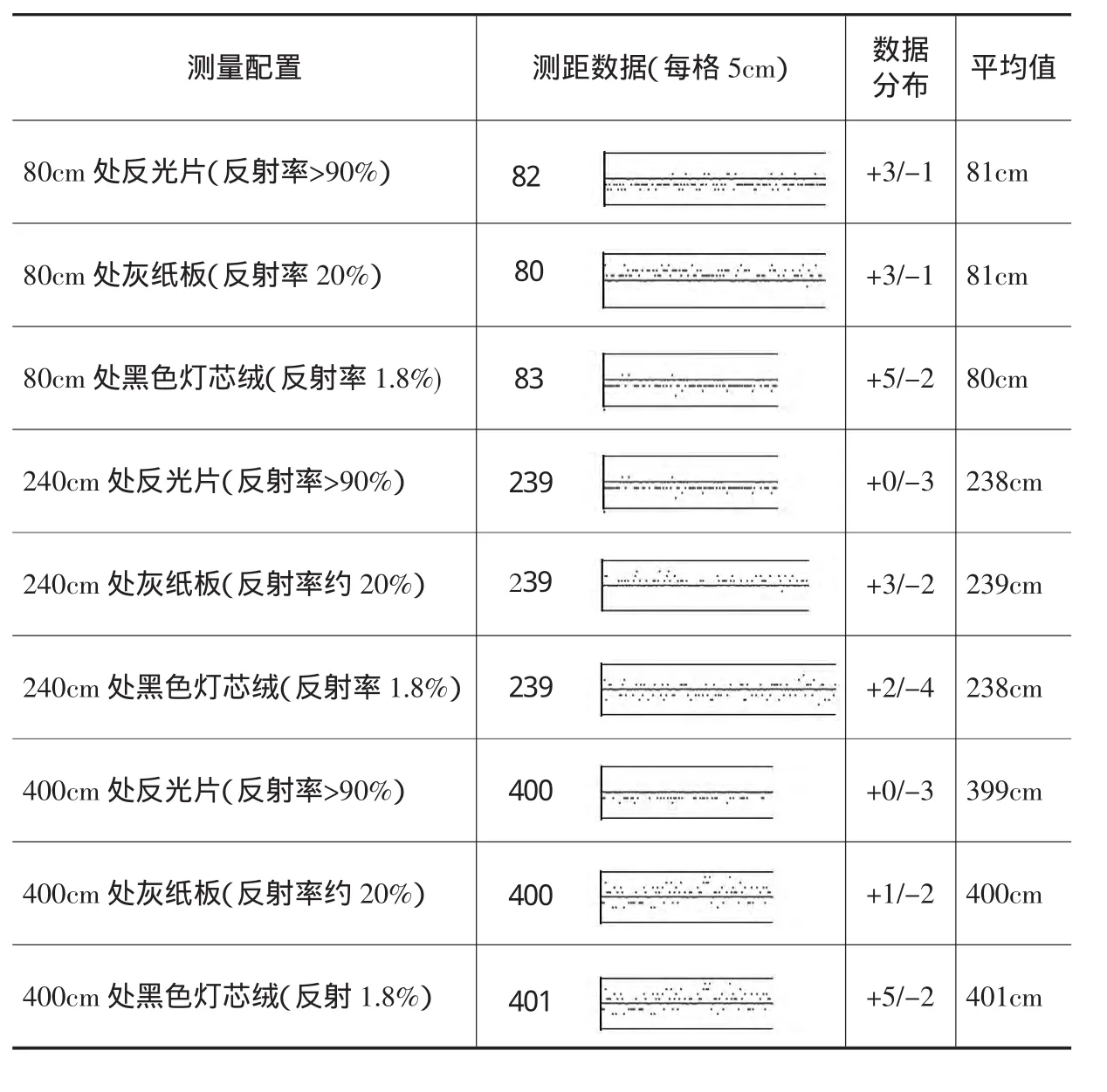
表1 不同反射率目标和不同距离测距数据
3 控制安全与可靠性设计
激光安全扫描仪用于工业现场安全防护,对扫描仪的安全可靠性具有极高的要求。
本文针对所有电路元件进行失效安全分析并采取措施,如电阻失效模式包括开路、短路、变值,集成元件失效分析包括任意引脚的开路、相互之间短路,电源变化导致的性能变化。同时采用双通道互检、周期性测试自检、关键回路冗余等技术保障安全,确保导致危险失效的任何单一故障能被检测到并切断安全输出;当不引起失效危险的单一故障未被检测时(如某个增强抗干扰能力的上拉电阻开路),继续进行故障累加测试,确保出现其他故障也不引起危险失效。最终设计的二维激光安全扫描仪符合标准IEC61496中type3安全等级要求。
为了应对工业现场复杂的电磁环境,本文采取模块化结构设计,结合屏蔽、最小环路设计、电气隔离、信号完整性设计、板级高频数模电路布局、串扰分析等措施,外加浪涌、脉冲群、静电吸收防护和旁路措施[5],使激光安全扫描仪完全通过标准IEC61496中type3产品相关EMC测试。
4 功能特点
4.1 保护区域自由配置、在线监控
激光安全扫描仪扫描区域半径最大4m、190°,可根据实际需求,将保护区域轮廓配置为任意形状(如矩形,多边形,或者自由曲线)。用户可使用USB电缆连接PC电脑和激光安全扫描仪,通过上位机软件绘制实际需要的保护区域轮廓,并发送给扫描仪。上位机简单界面如图3所示。
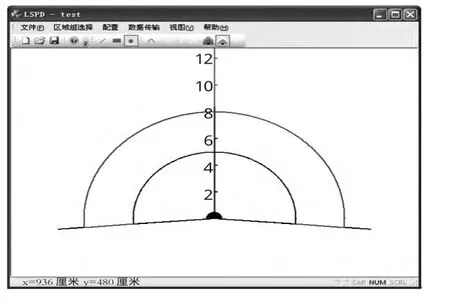
图3 上位机配置界面
当激光扫描仪和PC电脑建立连接后,可通过上位机软件实时监控扫描仪工作状态,如保护区域内障碍物位置。
4.2 激光安全
扫描仪使用905nm脉冲激光,平均功率<1mW,符合一类激光安全标准,对人眼安全[6]。
4.3 高分辨率、快速响应时间、无合作目标
激光安全扫描仪扫描角度分辨率0.36°,在4m处可检测到直径7cm的物体。采用光飞行时间测量技术、单次测量时间只有40μs,可在1s内完成25000次测量。扫描仪默认响应时间为80ms,针对特殊现场情况,如焊接站火星四溅、切割金属屑飞溅等场合,响应时间最长可调到680ms,减小因检测到飞溅物料而断开安全回路的可能,从而提高生产效率。
扫描仪能可靠探测扫描平面内反射率1.8%~100%的物体。
4.4 抗光干扰能力强
激光作为单色光,具有能量集中、穿透能力强、抗环境光干扰能力强等特点。本文同时采用窗口可见光滤波、接收透镜905nm窄带滤波措施,进一步增强扫描仪抗光干扰能力。
4.5 多区域组设置
扫描仪可存储4组不同轮廓形状的保护区域,用户可通过四组输入信号的变化切换至对应的保护区域。该功能满足了AGV(无人搬运车)行进中转弯时需改变保护区域轮廓的需求。
4.6 窗口污染检测
由于激光出射和接收窗口外露于空气中,当长时间使用、灰尘覆盖严重时,将严重削弱出射能量,最终无法实现4m内1.8%反射率物体的准确测距。因此扫描仪设置有窗口污染检测功能,当能量削弱过多时停止探测,直到窗口清洁后才能恢复,从而确保测距和功能安全。
5 应用展望
与超声波测距、相位法激光测距、雷达微波测距,脉冲测距技术等相比,具有超高速、无合作目标、商用价值高等优点。其中超声波测距成本最低,在民用倒车雷达上得到广泛应用,但是由于其测量速度低,尚无法满足快速运动控制领域的应用需求。相位法激光测距精度高,可至1mm以下,在工程领域有大量手持式相位测距仪应用,缺点是对目标反射率有要求,目标反射率低时需要使用反射棱镜等合作目标配合测量。雷达微波测距由于高昂的成本,商用较少。
与基于图像处理的视觉测量技术、各种基于CCD的测量技术比较,脉冲激光测距方法具有不受环境光明暗影响、夜间可靠工作等优点。
综合以上,基于脉冲激光飞行时间测量的二维激光安全扫描仪,在二维区域扫描、安全防护、移动控制领域应用前景光明,将发挥越来越重要的作用。
6 结语
本文介绍了一种安全防护用二维激光安全扫描仪,测距精度达到±6cm,可实现半径4m、190°的二维区域内反射率1.8%~100%的目标的可靠探测,同时符合标准IEC61496中type3电敏防护装置安全要求。可根据实际需求将扫描区域轮廓配置成任意几何形状。该激光安全扫描仪的成功研制,填补了国内产品空白,达到国外同类产品水平,推动了国内安全防护产品的发展,具有良好的社会效益和经济效益。
[1] 姜海娇,来建成,王春勇,等.激光雷达的测距特性及其测距精度研究[J].中国激光,2011,(5).
[2] 朱 福,林一楠.一种提高脉冲激光测距精度的方法[J].光电技术应用,2011,(2).
[3] 王 彬.半导体激光测距机关键技术[J].硅谷,2011,(5).
[4] 张育琪,徐 军,杨 佩.脉冲激光测距接收电路的设计[J].电子科技,2010,(4).
[5] 杨克俊,编著.电磁兼容原理与设计技术[M].北京:人民邮电出版社,2004.
[6] 陈 虹,尹志斌.激光产品的安全分级与防护[J].激光杂志,2010,(4).
