基于DSP的无速度传感器异步电机控制系统设计
2015-12-15苗俭威王英
苗俭威,王英
(大连交通大学 电气信息学院,辽宁 大连 116023)
0 引言
在大量的不需要精确位置控制和运行范围不包括零速和极低速的应用场合,无速度传感器异步电动机驱动系统已经替代了装有位置或速度传感器的传统矢量控制系统[1]。随着感应电机无速度传感器控制理论和电机控制专用CPU的发展,感应电机高性能无速度传感器控制的实现有了很好的硬件和软件条件,可以实现更完整的电机建模及更先进复杂的观测和控制算法[2]。而专门面向电机控制应用的数字信号处理器(DSP)和智能功率模块(IPM)的快速发展给高性能的电机控制的实现带来了可能。
本文以异步电动机矢量控制基本数学方程式为基础,介绍一种改进型电压模型转子磁链观测方案,设计了以DSPTMS320F2812为主控芯片的无速度传感器异步电机矢量控制调速系统,并给出了系统的硬件构成和软件设计。采用MATLAB/Simulink软件进行了仿真实验。实验结果证明该方法能够准确的估算转子磁链和转速,系统运行良好,证明了该方案的正确可行性。
1 基于模型参考自适应的系统设计
1.1 转子磁链的观测
转子磁链电压模型:
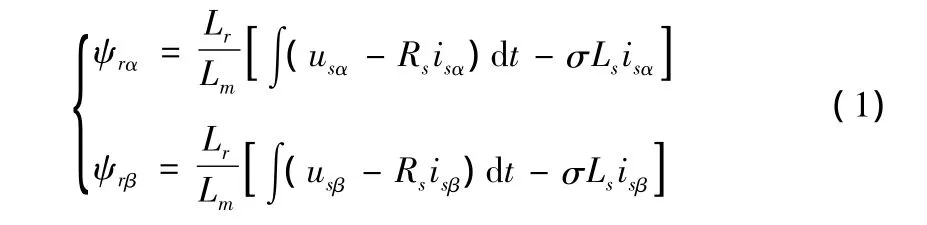
由于电压模型中含有纯积分环节,会产生直流偏置和初始值的问题,为了消除纯积分器产生的零点漂移和直流偏置问题,可增加一个高通滤波器环节。估算环节的传递函数为:

由上分析可知,一阶高通滤波器与纯积分的组合等效为一阶惯性环节。而这样的一阶惯性环节的引入会使得磁链幅值衰减并使相位滞后。如果不进行有效补偿,将导致磁场定向位置不准确,使得矢量控制解耦不完全,所以需要进行有效补偿。综上所述得到改进后的电压模型如图1所示[3]。
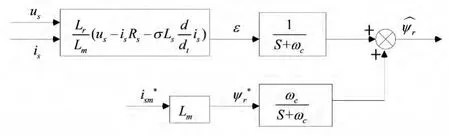
图1 改进型电压模型结构框图
1.2 基于MRAS的转速辨识
采用模型参考自适应的速度推算(MRAS)是利用转子磁链的电压方程和电流方程分别计算转子磁链,将电压模型的输出作为转子磁链的期望值,电流模型的输出作为转子磁链的推算值来计算电机的转速。根据Popov超稳定理论,按MRAS参数的结构,速度估算子模块将估算转速取为比例积分形式[4]。自适应律为:

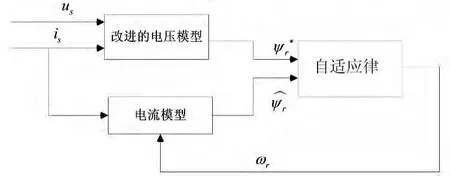
图2 改进MRAS系统结构图
2 系统设计
2.1 硬件构成
本文采用转子磁场定向的矢量控制方案,用 PI自适应法来估计转速,用改进电压型转子磁链模型估算转子磁链,实现速度、转矩、磁通的三闭环控制,其中三个调节器ASR、ATR、ApsiR均采用PI控制。系统实现框图如图3所示。
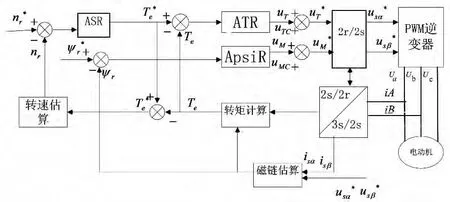
图3 无速度传感器矢量控制系统原理框图
由上述的系统原理框图可设计出硬件结构图,如图4所示。

图4 系统硬件结构
图4 中控制系统的主控芯片采用美国TI公司生产的TMS320F2812,它是TI公司推出的32位定点DSP芯片,该芯片采用高性能的CMOS技术,具有150MHZ的高速计算速度和面向电机控制的专用外围设备,模数转换能力强,成本低,可靠性高,因此被广泛应用于工业控制[5]。三相电压源逆变器采用三菱公司的智能功率模块(IPM)PS21265。
(1)隔离驱动电路
DSPTMS320F2812控制芯片输出的6路PWM开关信号需要经过光耦隔离驱动电路才能控制开关管的开通与关断,系统选用Avago公司生产的高速驱动光耦合芯片HCPL4504,该驱动芯片包 含GaAsP LED,并通过光学耦合到高增益光检测器。其中一相的隔离驱动电路如图5所示。
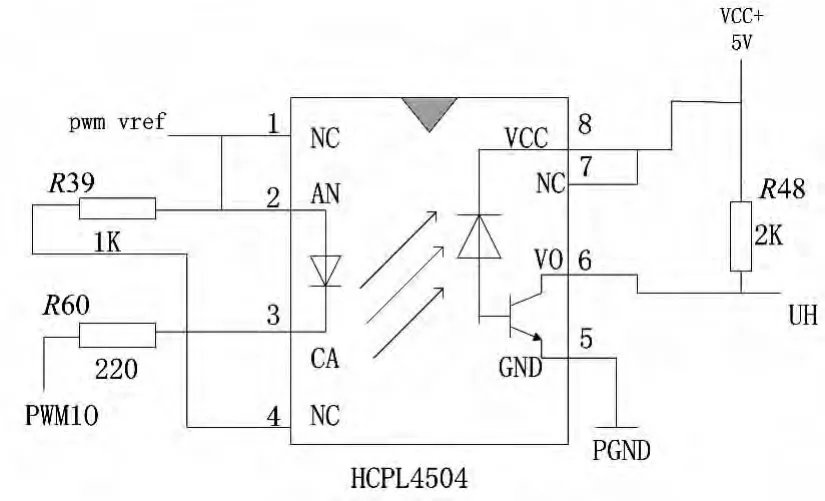
图5 PWM光耦隔离驱动电路
(2)检测电路
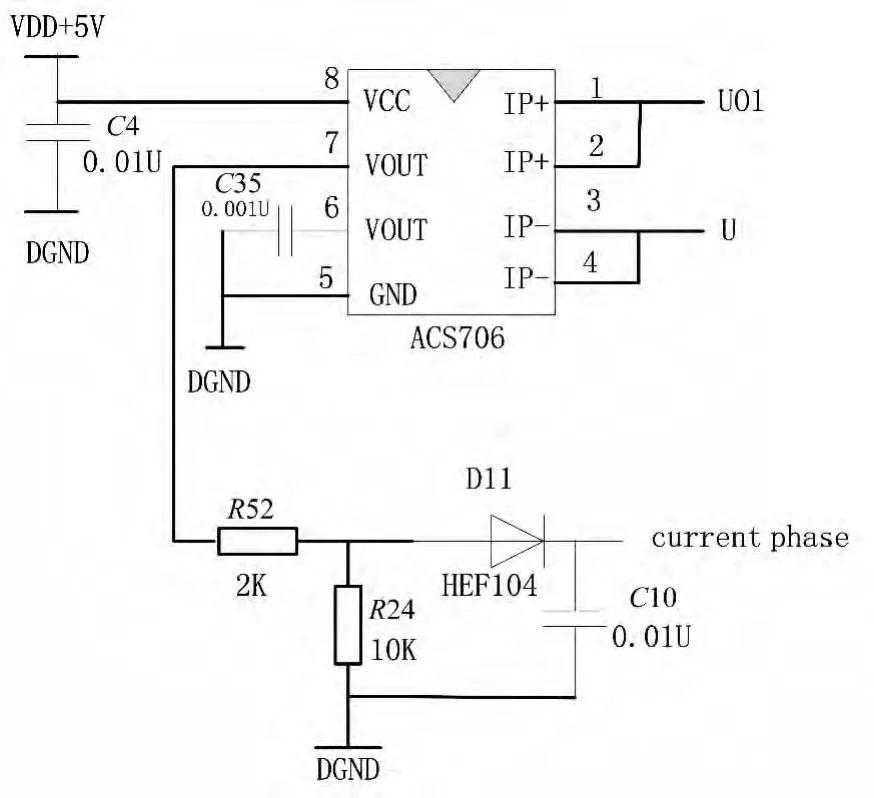
图6 电流检测电路
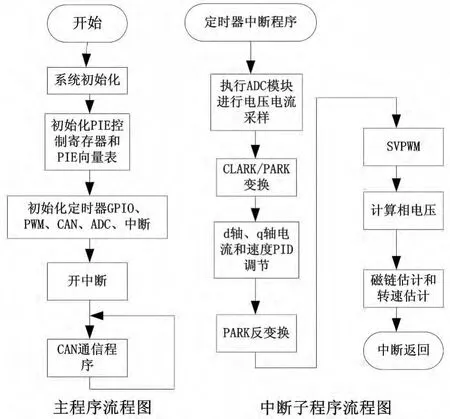
图7 程序流程图
电流检测电路是本文系统重要组成部分,选用ACS706系列电流传感器,它基于霍尔效应的原理,为双向线性电流传感器。由于霍尔元件输出的是有正有负的弱电流信号,因此首先将电流信号转换成电压信号,电压信号经过运算放大器的电压调理得到满足0~3 V要求的信号,再经过跟随器的隔离和限幅后,最后将检测值送至 DSP的 A/D转换器[6-7],其中一相的电流检测电路如图6所示。
2.2 软件实现
系统中上位机为装有CCS3.1软件的计算机,通过仿真器与DSP控制面板相连接,通过RS232进行通信。系统软件采用C语言进行编写,主要包括主程序和定时器下溢中断子程序,具体程序流程图如图7所示。
由以上分析构建DSP控制实验系统,采用型号DQ10的三相鼠笼式异步电机,接线方式 Y/A,上位机采用装有CCS3.1软件的计算机,通过仿真器 XDS520与DSP控制面板相连接,通过RS232总线进行通信。
3 系统仿真
仿真中采用的异步电机的额定参数如下:额定电压UN=380 V,额定频率为fN=50 Hz,定子电阻 RS=0.435 Ω,定子电感 LS=0.071 mH,转子电阻 Rr=0.816 Ω,转子电感 Lr=0.071 mH,互感 Lm=0.069 mH。极对数np=2,转动惯量J=0.18 kg·m2。系统仿真时空载起动,给定转速为1 200 r/min,系统运行到0.6 s时,突加一个负载转矩60 N·m,仿真得到的结果如图8图9所示。
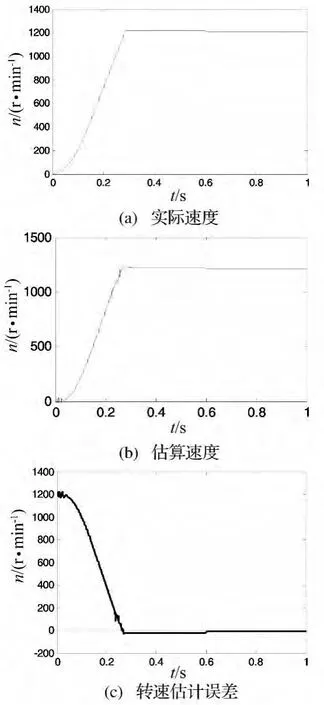
图8 转速仿真
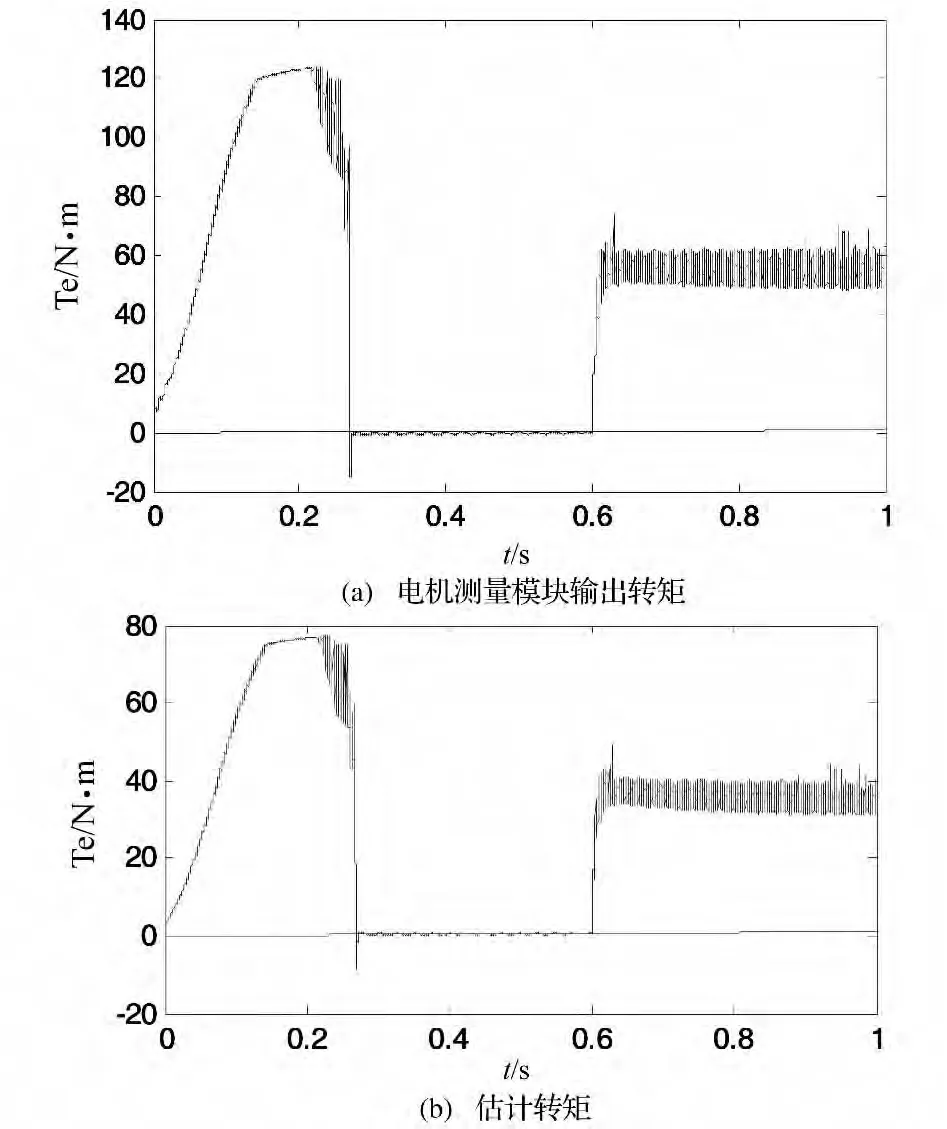
图9 转矩仿真结果
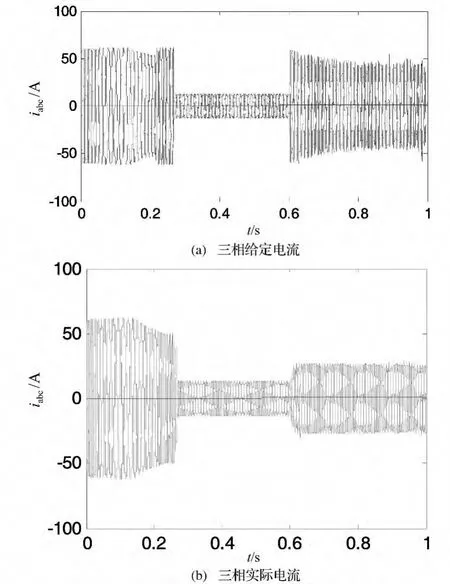
图10 电流仿真结果
由图 8(a)、(b)可知,转速平稳上升,在大概0.35 s时达到给定转速,0.6 s加载时转速略有下降但随即恢复,稳定时都达到了给定转速。(c)图为转速估计误差值,由波形可以看出,误差值随时间减小,最终稳定在零值附近,估算转速波形和实际波形基本相吻合,说明跟踪效果良好。
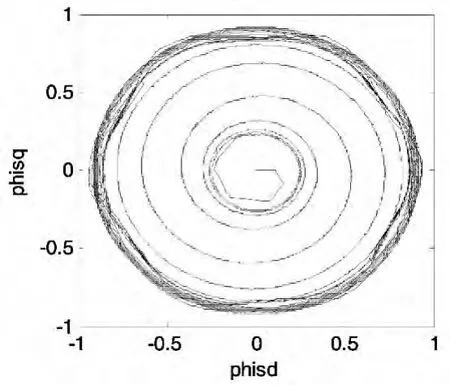
图11 定子磁链轨迹

图12 推算转速与实测转速的比较
图10 可以看出,0.6 s加载时,各调节器电流均发生相应响应,在起动过程中,定子电流基本保持不变,实现了恒电流起动。
图11所示为定子磁链轨迹,由图可看出在起动阶段,磁场的建立过程是比较平滑的,磁链呈螺旋形增加,最终达到稳定值。
图12所示为电机推算转速与实测转速在同一坐标系下的比较,图中带有微小波动的是推算转速,相比较平滑的是测量模块输出的转速,由图可见转速响应比较快,由于 PI控制器参数选择问题,估计的转速曲线稍微有点波动,二者差异较小。
4 结束语
本文介绍一种改进型电压模型转子磁链观测方案,设计了以DSPTMS320F2812为主控芯片的无速度传感器异步电机矢量控制调速系统,采用MATLAB/Simulink软件进行了仿真实验。实验结果证明该方法能够准确的估算转子磁链和转速,系统运行良好。
[1]H Tajima等(日)异步电动机无速度传感器矢量控制系统的速度估算及参数调整问题和解决方案[J].变流技术与电力牵引,2004,27(3):8-12.
[2]李永东,李明才.感应电机高性能无速度传感器控制系统——回顾、现状与展望[J].电气传动,2004,46(1):4-10.
[3]许晓峰,许傲然.异步电机无速度传感器矢量控制研究[J].电力电子技术,2013,47(6):71-73.
[4]周亚丽.基于MRAS的感应电无速度传感器矢量控制[J].微电机,2008,41(8):3-7.
[5]顾卫钢.手把手教你学DSP-基于TMS320X281X[M].3版.北京:北京航空航天大学出版社,2011.
[6]薛易,叶瑰昀.基于DSP的无速度传感器交流异步电机矢量控制系统设计[J].电气传动,2010,29(2):76-78.
[7]汪浩洋,邱瑞昌,赵晓红.基于DSP的异步电机无速度传感器矢量控制[J].电力电子技术,2010,44(4):51-54.
