基于预显示的大时延遥操作交会相平面控制
2015-12-15李海阳
李 涛,张 波,李海阳
(国防科技大学航天科学与工程学院,长沙410073)
基于预显示的大时延遥操作交会相平面控制
李 涛,张 波,李海阳
(国防科技大学航天科学与工程学院,长沙410073)
以时延条件下的地球轨道遥操作交会对接为背景,针对遥操作交会对接中时延引起的控制系统不稳定问题,开展了交会平移靠拢段的控制策略研究,在基于C-W方程的预测显示模型基础上,设计了平移靠拢段纵向速度曲线控制及横向位置-速度的相平面控制算法。仿真表明,该方法能有效克服大时延影响,具有较好控制效果,且算法简单可靠,易于工程实现。
遥操作;交会对接;相平面控制;时延
1 引言
遥操作交会对接是指操作人员利用遥操作方式远程控制追踪飞行器完成与目标飞行器的交会对接[1],时延条件下的控制是其面临的主要难题,由于遥操作控制器与追踪飞行器空间上物理隔离[2],遥操作所依赖的测量信息及控制指令均需经过天地测控通信系统进行编码、传输,导致整个控制回路存在一定的时延,使得操作人员无法实时感知远端被控对象的状态并进行及时干预,大大增加了遥操作交会对接的难度。为了克服时延影响,国内外学者先后提出了“运动-等待”控制策略[3]、基于力反馈的双边控制策略[4]等控制方法,但在大时延情况下控制效果不够理想。基于此,Munir等[5]提出了基于预测仿真的预测控制技术,并将虚拟现实技术应用于其中,很好地实现了结构化环境中的大时延遥操作。此后Sheridan等[6]对预测控制技术做了进一步的研究并取得了较高的时延预测精度。在国内,针对遥操作交会,周剑勇[1]建立了基于C-W方程的状态预显示算法,张波[2]在此基础上引入smith预估器进行状态预测,并进一步发展了遥操作共享控制方法,他们的研究结果表明,预显示技术在解决遥操作时延问题上仍不失为最佳方法。
遥操作交会对接作为自主交会对接技术的备份,对我国未来空间站建设及深空探测等领域的发展意义重大,而时延补偿是实现遥操作交会控制的关键。本文以地球轨道遥操作交会平移靠拢段控制策略为研究对象,首先在基于C-W方程的状态预显示模型基础上,建立虚拟实时控制回路,然后利用相平面控制方法对平移靠拢段追踪器相对于目标器的横向位置、速度进行了控制器设计及仿真验证。
2 问题概述
地球轨道遥操作交会数值仿真模型是进行交会控制器设计及仿真分析与验证的基础。在保证精度的前提下,对实际工程模型进行简化如下[1-2]:
1)由于目标器轨道偏心率较小,本文假定其为圆轨道;
2)由于J2摄动、太阳光压等摄动力相比于追踪器的控制力是高阶小量,控制设计时予以忽略;
3)由于平移靠拢段姿态运动与轨道运动相互影响较小,遥操作控制只考虑平移项,姿控由追踪器上的GNC系统实现。
2.1 交会模型
地球轨道遥操作交会简化模型如图1:

图1 遥操作交会简化模型Fig·1 The simplified model of teleoperation rendezvous
追踪器相对于目标器的相对运动状态信息由船载测量设备获得后通过天地通信链路下传到地面遥操作控制端,地面控制端延时接收后根据相应的控制算法给出控制力施加指令,通过天地通信链路上传到追踪器动力执行机构,动力执行机构延时执行相应控制指令控制追踪器最终实现与目标器的交会。
2.2 时延设定
遥操作交会中的时延τd总体上分为通信时延τc及信号处理时延[1]τs。τc定义为信息在天地通信链路中传输所需的时间,包括实时相对导航信息从交会环境下传到遥操作控制端以及控制指令的逆向上传;τs定义为设备对导航信息及控制指令做出反应以及编码、处理等花费的时间总和。从追踪器上相对导航信息开始下传到遥操作控制端针对该信息发出的控制指令被追踪器上控制机构执行结束,这段时间定义为时延周期τd(如式1):

考虑到遥操作交会中天地往返通信所需时间差别很小的情况,本文认为时延τd可以分为相等的两部分,即获得相对导航信息的后向时延及执行控制指令的前向时延。统一表示为式(2):

3 基于C-W方程的预估模型
3.1 相对动力学模型
追踪器相对于目标器的相对运动动力学模型是预估模型的基础,其推导在目标器轨道坐标系下进行。坐标系定义如下:以目标器质心为坐标系原点O,X轴指向目标器速度方向,Y轴在目标器轨道面内与地心矢径指向一致,Z轴垂直于X,Y轴由右手法则确定。假设目标器轨道为近圆轨道,追踪器的相对运动以状态方程形式的CW方程描述如式(3)[2]:

其中,X=[x,y,z,vx,vy,vz]T为追踪器相对状态向量,U=[ax,ay,az]T为追踪器所受控制力向量。


其中n为目标器角速度。
3.2 预显示模型
针对遥操作交会进行控制设计时,如果不考虑时延补偿问题,则控制器将以延迟接收的相对导航信息为实时输入,以延迟作用于追踪器的控制力为实时输出,控制精度及稳定性大大降低且很容易导致控制发散[7]。在遥操作控制回路中引入基于C-W方程的预显示模型进行时延补偿,构建实时虚拟控制回路是目前来说解决这一问题的最有效方法[6]。
从控制论的角度可以由状态方程形式的CW方程推得传递函数形式的追踪器相对运动状态仿真预测数学模型[8]如式(4):


其中Φ(t1)为状态转移矩阵,B(t1)为控制输入矩阵,u(τ)=[ax,ay,az]T为追踪器的控制加速度项。已知t时刻追踪器的相对状态X(t)及t1时间段内u(τ),可以根据预测模型推断t+ t1时刻追踪器的相对状态。
以实时交会过程时间轴为基准轴,预显示模型的预测过程如下:t时刻遥操作控制端根据仿真预测数学模型对追踪器相对状态信息X(t-Td)进行外推,得到相对状态预测值X(t+Td)以进行时延补偿,并以X(t+Td)作为遥操作控制端实时输入得到超前预测控制力序列,t+Td时刻追踪器执行机构执行遥操作控制端延时发送的控制力指令施加相应控制。随着仿真时间步长的进行,上述过程不断推进,这样就可以在虚拟实时控制回路中实现闭环实时控制。
3.3 滤波模型
工程实际中,遥操作控制端接收到的追踪器相对状态测量信息不可避免地存在测量偏差,基于此,本文采用带控制项的卡尔曼滤波方法对数据进行滤波处理。忽略系统噪声,卡尔曼滤波的状态方程由前述预显示模型离散化得到。则滤波状态方程及观测方程[9]如式(5):

其中,k表示对应于tk的离散时刻;H为观测矩阵;vk为观测噪声矩阵,具有式(6)所示特性:

其中,δij为克罗耐克符号,
4 相平面控制器设计
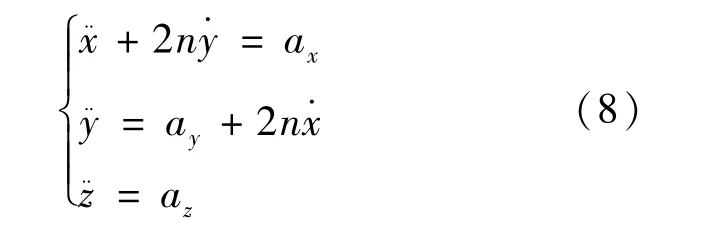
本文基于相平面开关控制基本原理进行控制器的设计。追踪器在目标器轨道坐标系中相对运动动力学方程[10]如式(7):

其中n为目标器轨道角速度,控制器控制对象为追踪器横向(Y,Z轴)相对位置、速度及纵向(X轴)相对速度。设计过程中考虑到n为10-2量级的小量,含n2项可以略去,方程可写为式(8):
X方向仅对速度vx进行简单的开关控制律设计,保证其逼近速度满足工程要求即可。Y向控制器设计时将其写成与Z向方程相同的形式,将X向速度耦合项移至方程右侧与ay一起作为Y向等效控制加速度处理,为保证其快速收敛,采用到达极限环的快速控制开关曲线进行控制器设计。Z向由于与X,Y均不耦合且形式简单,控制器设计时采用姿控中常用的倾斜直线开关曲线。各方向相平面控制方法及开关曲线如下图2~4所示:

图2 X向控制设计曲线Fig·2 The design curves of controllerin X-direction

图3 Y向控制开关曲线Fig·3 The switch curves of controller in Y-direction
对应开关曲线如下:
负开线:y·2=-2(a0+2nx·)(y-d)
负关线:y·2=2(a0+2nx·)(y-d+δ)
正开线:y·2=2(a0+2nx·)(y+d)
正关线:y·2=-2(a0+2nx·)(y+d-δ)

图4 Z向控制开关曲线Fig·4 The switch curves of controller in Z-direction
对应开关曲线如下
负开线:z+τz·=d
负关线:z+τz·=d-δ
正开线:z+τz·=-d
正关线:z+τz·=-(d-δ)
其中,τ为开关曲线的斜率,d为推力器电磁阀门限值,δ为电磁阀滞宽。Y向控制相平面开关曲线是时变曲线。
5 仿真结果与分析
5.1 仿真参数配置
目标器初始轨道根数如下a=6714786.6m,偏心率e=0.000873,i=42.431°,Ω=251.261°,真近点角f=10.451°。追踪器在目标器轨道坐标系中的初始相对状态向量设定为:[-150,5,5,0,0,0]T,对接初始条件定义为:纵向速度横向位置

相对位置、速度测量偏差为均值0的高斯白噪声,相对位置、速度标准差如下:

其中ρ为相对距离,追踪器三轴控制加速度均设为0.01m/s2,控制加速度偏差为均值0的高斯白噪声,控制加速度标准差如下:

仿真工况考虑τd=0,6,15 s三组时延,每一时延下均进行有预显示及无预显示控制交会数值仿真,为保证精度,仿真时采用考虑J2项摄动、大气阻力、太阳光压等摄动因素的高精度动力学模型进行数值计算,积分算法为4阶Ronge-Kutta法。仿真过程中,d=0.12,δ=0.01,τ=3.5为定值。
5.2 结果分析
不同时延设定值下无预显示相平面控制交会仿真结果如图5~6所示:

图5 Y向位置变化曲线对比Fig·5 The com parison of the positions in Y-direction

图6 Z向位置变化曲线对比Fig·6 The comparison of the positions in Z-direction
结果表明,相平面控制在时延为0的情况下有效且控制精度较高。引入时延会严重影响控制性能及精度,时延的增大最终导致控制发散。在控制过程中引入预显示方法,仿真结果如图7-8所示:

图7 预显示控制下Y向位置变化曲线Fig·7 Position changes in Y-direction under the control w ith predictive display

图8 预显示控制下Z向速度变化曲线Fig·8 Yelocity changes in Z-direction under the control w ith predictive display
图7 、图8的结果表明,时延为6 s时,预显示控制作用下,追踪器相对于目标器的横向位置、速度曲线与时延为0的实时控制下对应曲线基本重合。仿真结束时追踪器相对运动状态为X=[-0.0072,0.04,0.096,0.171,-0.0148,0.0002]T,能够很好满足对接初始条件。引入预显示环节相当于构建了虚拟实时控制回路,能有效解决时延引起的控制不稳定性。
仿真结果同时还表明,预显示环节的有效性取决于其预测精度,图9和图10分别就时延为6 s、15 s两种情况下Y向位置的预测值曲线与仿真值曲线进行了对比。时延6 s时预测值与仿真值吻合较好,当时延增大至15 s时,预测模型的预测偏差明显增大,从图7、图8可以看出,相较于6 s时延的情况,15 s时延下控制稳定性及精度明显降低。由于本文预测模型基于线性化的C-W方程建立,且忽略了J2、太阳光压等摄动力及其他实际情况中不确定因素的影响,预测偏差客观存在。时延越大预测偏差越大,对控制有效性的影响越大,建立更符合实际的高精度预测模型,发展更好的时延补偿鲁棒性算法在遥操作控制中具有重要的实际意义。
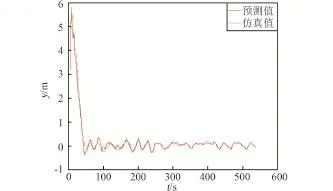
图9 时延6 s下y的真实值与预测值对比Fig·9 Comparison of the positions of real values and predictive values in y-direction with 6 s of time delay
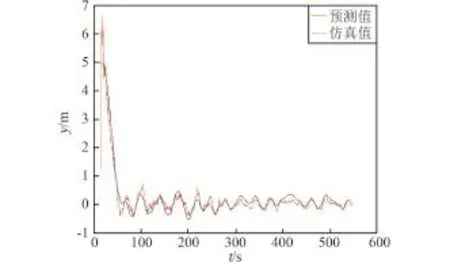
图10 时延15 s下y的真实值与预测值对比Fig·10 Comparison of the positions of real values and predictive values in y-direction with 15 s of time delay
6 结论
1)加入预显示环节,构建虚拟实时控制回路是进行时延补偿的有效手段。基于预显示的相平面控制算法能够取得较好的控制效果及精度。
2)时延的增大会严重影响预显示模型的预测精度,进而导致控制失效。
3)建立符合实际情况的高精度预测模型、发展时延补偿效果好、控制稳定性强的鲁棒算法是解决遥操作过程中时延问题的关键。
References)
[1] 周剑勇.遥操作交会对接概念与关键技术研究[D].长沙:国防科技大学,2013. Zhou Jianyong.Research on Concepts and KeyTechniques of Teleoperation Rendezvous and Docking[D].ChangSha:National University of Defense Technology,2013.(in Chinese)
[2] 张波.考虑安全性的遥操作交会共享控制方法研究[D].长沙.国防科技大学,2014. Zhang Bo.Shared Control of Teleoperation Rendezvous Based on the Consideration of Safety[D].ChangSha:National University of Defense Technology,2014.(in Chinese)
[3] 李群智,宁远明,申振荣,等.行星表面巡视探测器遥操作技术研究[J].航天器工程,2008,17(3):29-35. Li Qunzhi,Ning Yuanming,Shen Zhenrong,et al.Study on teleoperation of rover on planetary surface[J].SpaceCraft Engineering,2008,17(3):29-35.(in Chinese)
[4] Anderson R,Spong M.Bilateral control of teleoperators with time delay[J].IEEE Trans Automat Contr,1989,34:494-501.
[5] Munir,S.Internet Based Teleoperation[D].Atlanta:Georgia Institute of Technology,2000.
[6] Sheridan T B.Space teleoperation through time delay:review and prognosis[J].IEEE Transaction on Robotics and Automation,1993,9(6):592-606.
[7] 张波,李海阳,唐国金.变时延遥操作交会的Smith模糊控制[J].物理学报,2013,62(2):029601-10 Zhang Bo,Li Haiyang,Tang Guojin.Smith fuzzy control of teleoperation rendezvous with variable time delay[J].Acta Physica Sinica,2013,62(2):029601-10.(in Chinese)
[8] 张波,李海阳,唐国金.环月轨道遥操作交会对接预测共享控制[J].宇航学报,2014,35(3):316-323. Zhang Bo,Li Haiyang,Tang Guojin.Predictive shared control teleoperation rendezvous and docking in lunar orbit[J]. Journal of Astronautics,2014,35(3):316-323.(in Chinese)
[9] 刘胜.最优估计理论[M].北京:科学出版社,2011:139-141. Liu Sheng.The optimal estimation theory[M].Beijing:Science Press.2011:139-141.(in Chinese)
[10] 周建平.载人航天交会对接技术[J].载人航天,2011,17 (2):1-8. Zhou Jianping.Rendezvous and Docking Technology of Manned Spaceflight[J].Manned Spaceflight,2011,17(2):1-8. (in Chinese)
Phase Plane Control of Teleoperation Rendezvous with Large Time Delay Based on Predictive Display
LI Tao,ZHANG Bo,LI Haiyang
(College of Aerospace Science and Engineering,National University of Defense Technology,Changsha 410073,China)
Based on the problem of ground-based teleoperation rendezvous and docking in earth orbit with time delay,this paperfocused on the delay-induced instability of control system on teleoperation rendezvous and docking.The strategy of orbit control in the final approach phase was studied.A predictive model was established based on the Clohessy-Wiltshire equations.The longitudinal velocity control algorithm and transverse position-velocity control algorithms were proposed based on the previous predictive model.Simulation results show that the control method is effective in alleviating the influence of time delay and the success probability is improved.The algorithm is proved to be simple and reliable,and can be easily implemented in engineering.
teleoperation;rendezvous and docking;phase plane control;time delay
V448.2
A
1674-5825(2015)05-0456-06
2014-08-27;
2015-07-30
李 涛(1990-),男,硕士研究生,研究方向为航天器总体设计与系统仿真。E-mail:litao0420@163.com