面向出舱活动的典型功能操作肌肉激活预测
2015-12-15王晓东刘志臻王春慧
王晓东,王 政,李 昊,李 凡,刘志臻,王春慧
(中国航天员科研训练中心人因工程重点实验室,北京100094)
面向出舱活动的典型功能操作肌肉激活预测
王晓东,王 政,李 昊,李 凡,刘志臻,王春慧∗
(中国航天员科研训练中心人因工程重点实验室,北京100094)
面向出舱活动中航天员肌肉状态和体力负荷的风险评估,为了实现航天员肌肉激活的预测,开展了着常服和舱外服两种工况下不同操作位置的推、拉、提、压共8组典型功能操作实验,测试航天员最大施力能力的同时采集了肱二头肌长头、肱三头肌外侧头和三角肌前束的肌电信号。提出基于人-舱外服耦合运动生物力学模型预测着舱外服人体的肌肉激活,并预测了两种工况下8组典型功能操作的肌肉激活。通过预测结果和积分肌电值的相关性分析,验证了模型预测的有效性,为研究人-舱外服真实交互方式提供了新的方法学思路,对肌肉激活的预测为出舱活动任务规划提供了生理学依据。
出舱活动;舱外服;生物力学建模;肌肉激活;AnyBody;工效学
1 引言
随着我国空间站任务的进行,空间站的后续建设、维护和科学实验对航天员出舱活动提出了迫切的需求。由于出舱活动中航天员要面对真空、辐射和极其恶劣的温湿度环境,所以必须穿着舱外服,由其提供氧气、适宜的温湿度和其他生命保障。迄今为止,舱外服主要采用多层软质材料和刚性轴承相结合的充压设计结构(通常30~40 kPa)[1]。该设计导致舱外服关节的弯曲需要克服额外的阻力,被称为阻尼力矩。因此,航天员穿着舱外服进行舱外活动时,体力负荷明显大于未穿着舱外服时。研究者曾通过动力学仿真证明,航天员穿着舱外服在微重力条件下移动大重物时,关节做功远大于未穿着舱外服时[2]。
然而,在生理层面,航天员的疲劳和酸痛感往往产生于处于较大激活状态的肌肉[3]。因此,基于人体测量学、骨肌系统解剖学和计算机仿真学的相关研究成果,预测出舱活动中不同操作航天员的肌肉激活,对于出舱活动的工效评估和任务规划都是十分有意义的。生物力学建模方法的出现,为探索人-机(舱外服)交互提供了一个崭新的思路[3-5]。该方法将人体的骨骼、肌肉简化为力学系统中的不同元素,实现关节力矩、肌肉力的预测,为工效评估提供了量化解决方案。依据不同思路,运动生物力学建模方法可分为正向动力学建模和反向动力学建模[6],反向动力学从运动学数据求解肌肉力,而正向动力学从肌肉力出发预测运动轨迹。根据不同建模方法,形成了一系列的人体骨肌系统生物力学建模平台,包括AnyBody,Opensim等。其中,AnyBody平台采用反向运动学架构,将运动学数据作为输入,基于人体会最大限度地降低肌肉疲劳的假设,利用优化方法实现人体肌肉力的募集求解[7]。本研究在AnyBody平台上实现了人-舱外服的运动生物力学耦合建模,从而预测着舱外服人体开展功能操作时的肌肉力,为人-舱外服生物力学交互研究提供了方法学支撑。
本文开展了9名受试者在着常服和着舱外服两种工况下典型功能力量对比测试,并采集了肌电信号表征肌肉的激活程度。通过舱外服手臂建模和人-舱外服上肢耦合运动生物力学建模实现了两种工况下的典型功能操作仿真,用于计算肌肉激活程度,通过计算实验中所测肌电信号和预测肌肉激活程度之间的相关性验证模型。
2 实验
2.1 受试者
9名受试者年龄25~45岁,身高(172±7) cm,体重(68±14)kg,BMI指标(19~25)kg/m2。受试者骨骼肌肉均无伤病史,在测试前3天要求不参加较大体力负荷的劳动。
2.2 测试项目和测试方式
本研究开展了9名受试者在着常服和着舱外服工况下的8种功能操作最大静态力量测试。
功能操作包括左右方向的推、拉和上下方向的提、压。这些功能操作都是出舱活动中经常出现的典型操作,例如提、压对应开舱门时的单臂逆/顺时针旋转操作,推、拉则在许多出舱操作中都会出现。左右方向的推和拉在肩部水平面内进行,设置了舒适位置和舒适外边界两个位置,上下方向的提、压设置了舒适高度和舒适上边界两个高度。因此,区分不同位置和不同操作,共8种功能力量。推、拉、提、压操作如图1所示。

图1 不同功能操作示意图Fig·1 Illustration of different functional tasks
采用BTE Primus模拟仿真训练系统测试上述力量,测得的数据均为力矩值,将力矩值除以力臂长,可得功能力量测试中受试者的最大静态功能力量。根据公认的力量测试方法[3]和受试者主观体验,每种力测量3次,每次持续6 s;各次之间休息30 s以上,不同力的测量之间休息3 min以上;功能操作力量测试工况分为着常服和着舱外服两种工况。其中,舱外服工况测试时,加压舱外服躯干固定在专用小车上,受试者在舱外服内部进行操作;常服工况测试时将受试者利用绑带固定在专用座椅上。在上述测试方式下,受试者躯干都得到良好固定,上肢力量能够得到充分发挥,不受反作用力限制。
2.3 表面肌电信号采集
皮肤表面肌电能够反映肌肉的真实激活状态[8],因此本研究采集了两种工况下的表面肌电用于模型验证。舱外服工况采用Noraxon无线肌电系统采集肌电,舱外服内部肌电信号通过蓝牙发送至接收器,由于舱外服本身对辐射的屏蔽作用,所以也会屏蔽部分蓝牙信号,因此在实际采集时应当将接收器放置在距离舱外服尽可能近的位置,减少信号衰减。常服工况采用Biovision有线肌电系统采集肌电。本研究采集了三角肌前束,肱二头肌长头和肱三头肌外侧头的表面肌电信号用于反映不同操作中不同肌肉的激活程度。
2.4 相对操作位置采集
本研究利用NDIOptotrak测量舱外服工况下,操作手柄和舱外服的相对位置关系;然后在常服工况下,按照该相对关系设定操作手柄和受试者的相对位置,从而使两种工况下功能操作的操作位置和姿态尽可能一致。在运动生物力学建模中,将该相对操作位置作为模型运动学输入,结合施力方向和其它关节角度限制,确定受试者的操作姿态。
3 方法
3.1 舱外服手臂模型
为了研究舱外服手臂对人体上肢骨骼肌肉的影响,需要从运动学和力学角度建立舱外服手臂模型[2,9-10]。本研究建立的手臂模型包括几何刚体模型、关节运动学模型和关节阻尼力矩模型,如图2所示。舱外服在加压后,手臂的各个组件均体现出很强的刚性,因此可将其简化为圆筒状几何刚体模型,组件具有质量、质心、转动惯量等特性;各个组件由关节运动学模型相连,采用欧拉角描述转动,每个关节运动学模型均按照舱外航天服关节的几何位置、转动方向和转动自由度进行设置,从而尽可能真实地刻画舱外服的运动学限制;由于舱外服在加压后关节会有弹向中性位置的倾向,被称为关节阻尼迟滞特性,是关节的力学性质[1],本研究基于阻尼力矩测量值建立了关节阻尼力矩三次多项式回归模型,用于描述关节的动力学约束,如图3所示。关节阻尼的迟滞特性是指关节阻尼力矩不仅和关节角度有关,而且和关节角度历史有关,如图3中关节弯曲和伸展的阻尼力矩轨迹不同,中性位置也不同。由于在静态功能操作中并不知道关节的历史运动轨迹,所以本研究采用了弯曲和伸展共同的回归曲线,在二者中间。
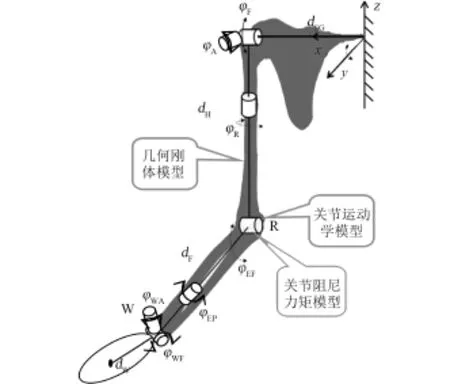
图2 舱外服手臂模型Fig·2 Arm model of EVA spacesuit

图3 舱外服肘关节阻尼迟滞特性Fig·3 Hysteresis of elbow joint stiffness in EVA spacesuit
运动学模型中,手部中心在胸骨坐标系中的位姿矩阵可表示为式(1):

其中,GSG表示从躯干胸部中心到肩关节的位移;GGH表示肩轴承、肩部软关节和上臂轴承的转动,对应人体肩关节三自由度的转动;GEB表示肘部软关节和前臂轴承的转动,对应人体肘关节的弯曲/伸展和内旋/外旋;GW表示腕部软关节的转动,对应人体腕关节两个自由度的转动。GSG、GGH、GEB、GW计算方法如公式(2)~(5)所示。利用该运动学模型,可以确定舱外服手部的最终姿态。

3.2 人-舱外服上肢耦合运动生物力学建模
为了研究舱外服对人体施力能力的影响,需要实现上一节中建立的舱外服手臂模型和人体上肢骨肌系统模型的耦合。首先是指舱外服手臂模型必须随着人体上肢骨肌系统的运动而运动,即运动学耦合;其次是指人体上肢通过和舱外服手臂之间的反作用力驱动舱外服手臂实现上述运动,即动力学耦合。
本研究通过定义全约束虚拟关节的方式,约束人-舱外服手部之间的6个自由度;通过人-舱外服肘部之间2个自由度的位移约束,使得人体上肢肘部和舱外服手臂肘部尽可能重合。上述两种约束方式,主要根据人体上肢和舱外服之间的交互方式制定,使得仿真工况接近真实工况。由于人-舱外服手臂之间的连接只需要约束7个自由度,因此上述约束方式属于过度约束,需要在运动学求解时使用优化求解方法。采用过度约束是因为如果只约束两者肘部一个自由度的位移,容易产生多重解或无解的情况,而这种情况是由于舱外服手臂和人体之间的不完全匹配引起的。通过上述约束方式,本研究实现了人体上肢和舱外服手臂之间的运动学耦合,只需要知道舱外服手臂或人体上肢的运动,就可以知道另外一个的运动轨迹。
实际上,人体上肢是通过和舱外服手臂之间的接触力驱动其运动的[11],如何模拟上述接触力是动力学耦合的关键。近来,反作用力力元被广泛地应用于预测步态分析中的地面反作用力分布,并得到了有效的验证[12-13]。本研究通过建立人体上肢和舱外服手臂之间多个部位的反作用力力元,达到模拟两者之间接触力的目标。反作用力力元由虚拟肌肉组成,像人体其他普通肌肉模型一样,虚拟肌肉力也属于肌肉募集优化算法中未知数的一部分。肌肉募集算法如公式(6)所示[7]:G是肌肉募集算法的目标函数表示肌肉i的肌肉力,Ni表示肌肉i的最大收缩能力,也就是说肌肉募集要使所有肌肉的最大激活最小,从而使得载荷尽可能平均地分布到所有肌肉。未知肌肉力f由正常肌肉力f(M)和由虚拟肌肉构成的反作用力f(R)组成。(b)和(c)表示整个耦合模型需要满足的动力学约束条件,其中(b)中C表示已知矩阵,由肌肉相对关节附着位置和方向等求得,d表示已知载荷,(c)表示普通肌肉力的非负约束。从理解角度出发,肌肉募集寻优过程可分为两个过程,首先是寻找能产生最优肌肉募集的反作用力组合,其次是求解该反作用力组合下的最优肌肉募集。为了实现上述募集寻优过程,需要对虚拟肌肉的力量进行预先处理,使得虚拟肌肉的最大收缩能力足够大,而不会对普通肌肉的募集产生影响。


图4 人-舱外服手臂耦合运动生物力学仿真Fig·4 Biomechanical simulation of human EVA spacesuit arm interaction
通过人体上肢和舱外服手臂之间的运动学和动力学耦合,实现了着舱外服工况下的人体上肢操作的运动生物力学仿真,用于预测不同操作中的肌肉力。本研究将该模型用于8个功能操作的仿真,以受试者身高、体重、上臂长、前臂长、手部末端力作为模型输入,计算了三角肌、肱二头肌长头和肱三头肌外侧头的肌肉激活。图4为人-舱外服手臂耦合运动生物力学模型用于上提操作仿真的示意图,图中的线段表示人体上肢和舱外服手臂之间维持当前姿态所需的接触反力。依据所测肌肉的表面肌电信号计算肌肉的积分肌电iEMG,用于反映肌肉的真实激活程度[14]。通过预测肌肉激活和iEMG之间的相关性验证模型的有效性。
4 结果
4.1 肌肉激活程度验证
由于积分肌电指标能够很好地反应肌肉的激活状况[14],因此本研究通过模型预测的肌肉激活和积分肌电的相关性来验证模型预测的有效性。表1表示了着常服和着舱外服工况下,肱二头肌长头、肱三头肌外侧头和三角肌在8种功能操作最大力量测试中的肌肉激活和积分肌电的Pearson相关性。9名受试者中,常服工况下采集了7名受试者的肌电信号,舱外服工况下采集了6名受试者的肌电信号。
常服工况的功能操作运动生物力学仿真不含舱外服模型,7名受试者中肱二头肌长头、肱三头肌外侧头和三角肌前束预测激活和实测积分肌电有显著相关性的比例为7/7、4/7、5/7。所有受试者一起分析时,三块肌肉均具有显著相关性,其Pearson相关系数分别为0.729、0.533和0.692,略小于个体相关系数的平均值,主要是由受试者表面肌电的个体差异造成的。
舱外服工况的功能操作运动生物力学仿真引入了舱外服模型,6名受试者中三块肌肉的预测激活和积分肌电具有显著相关性的比例为6/6、4/6、6/6。所有受试者一起分析时,三块肌肉均具有显著相关性,其Pearson相关系数分别为0.729、0.600和0.795,相关性三角肌前束>肱二头肌长头>肱三头肌外侧头。
5 分析与讨论
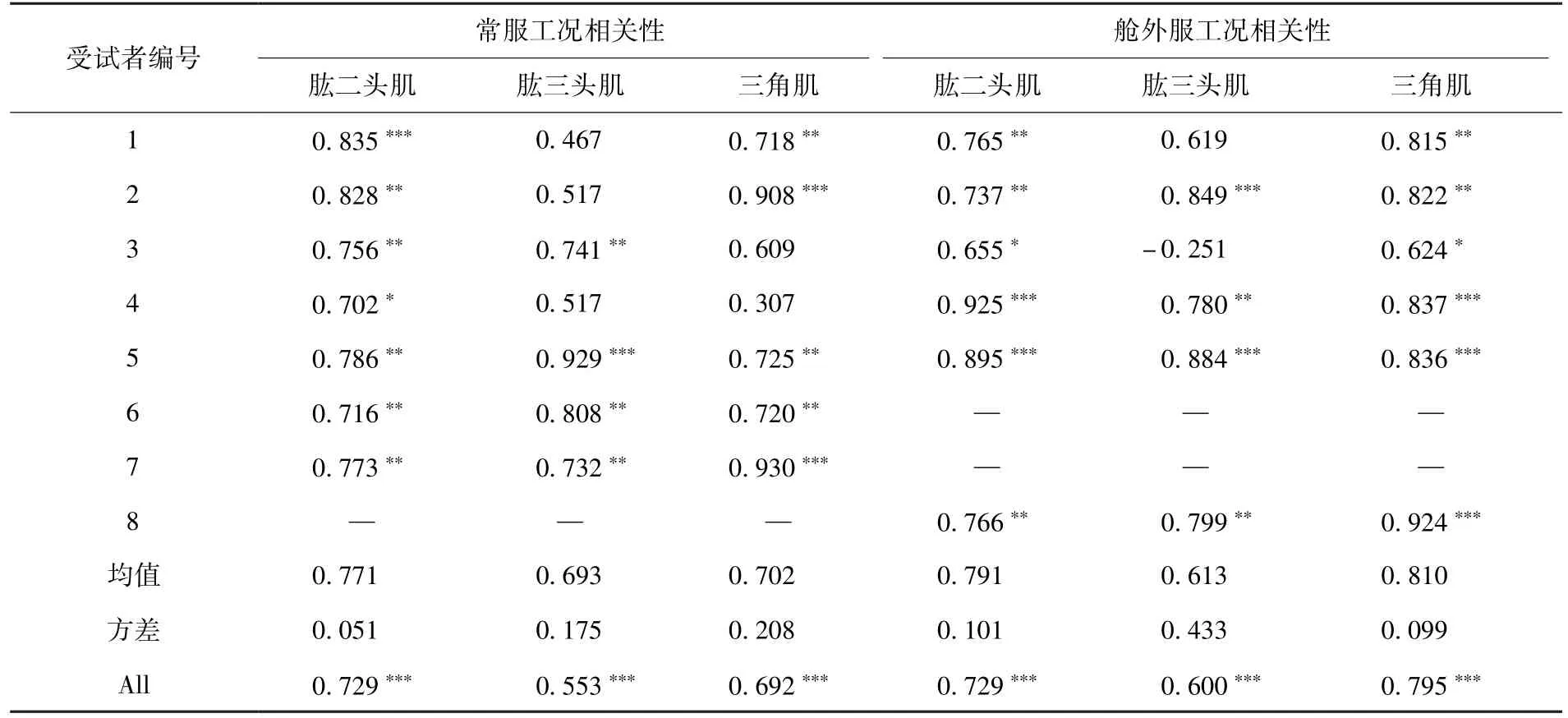
表1 8种功能操作预测肌肉激活和积分肌电的皮尔逊相关性Table 1 Pearson correlation analysis between predicted muscle activation and iEMG for eight functional tasks
实验方法方面,本研究在国内首次实现了加压舱外服内部的皮肤表面肌电信号采集,用于肌肉发力状况的实时监控。采用了Noraxon无线肌电采集系统,舱外服内部传感器采集的肌肉电信号通过蓝牙传送至外部接收器。主要有三点经验:1)接收器的位置会影响蓝牙信号接收的质量。舱外服在太空中的一个重要作用就是隔离辐射,所以对无线信号均具有一定的阻断作用。距离舱外服内部肌电信号发射器越远,肌电信号衰减越严重,舱外服工况下部分受试者肌电信号缺失就是由这个原因导致的。2)舱外服内部传感器必须附着在皮肤表面,介于皮肤和舱外服内壁之间。由于人体皮肤和舱外服之间频繁地产生接触力,容易使传感器产生移动,导致肌电信号测试不准确,所以必须采取一定的措施固定传感器,本研究采用透气绷带固定传感器。3)内部传感器的体积必须尽可能的小,否则会影响人体皮肤和舱外服手臂之间的接触方式,导致局部接触压强过大,从而影响人体在舱外服内部的操作能力,甚至引起局部压伤。
研究方法方面,本研究在运动生物力学架构中实现了着舱外服人体的肌肉激活预测。目前还有以下不足:1)模型验证目前仍采用定性的方法。肌肉激活和肌电信号之间的相关性验证作为一种定性验证的方法,说明了模型的有效性,却无法反映模型的精确程度。在后续的研究中实现人体皮肤-舱外服的接触力测量,一方面通过对比预测的接触反力可以定量地验证模型,另外一方面也可以作为模型的输入,增强模型的精确性。2)目前的动力学耦合仅根据人-舱外服实验中专家受试者的穿着体验,确定了人体皮肤和舱外服手臂的主要接触力产生位置,从而设置反作用力力元。在后续的模型研究中,尝试定义舱外服手臂内壁和人体皮肤表面的几何空间,只有当二者产生接触时,反作用力力元才会被激活,可以实现运动学耦合和动力学耦合的有机统一,达到更智能化的人-舱外服交互运动生物力学建模。
6 结论
本研究为探索人-舱外服之间的真实交互方式提供了新的方法。舱外服内部肌电信号的采集能够更真实地反映出舱活动中航天员的肌肉激活和体力负荷。运动生物力学模型实现了着舱外服人体接触力和肌肉激活,可以为出舱活动的方案设计阶段提供参考。
通过肌肉激活和积分肌电的相关性分析,验证了常服工况和舱外服工况运动生物力学模型的有效性,表明模型能够用于预测出舱活动典型功能操作中不同肌肉的激活程度。舱外服工况下两者之间的相关性没有下降,一方面表明舱外服对于肌电信号采集的有效性影响较小,另一方面表明本研究建立的人-舱外服耦合运动生物力学模型是较为准确的。
References)
[1] Matty J.Results and analysis from space suit joint torque testing[C]//40th International Conference on Environmental Systems,AIAA Paper,2010.
[2] Newman D,Schmidt P,Rahn D.Modeling the extravehicular mobility unit(EMU)space suit:physiological implications for extravehicular activity(EVA)[R].SAE Technical Paper,2000.
[3] Chaffin D B.The evolving role of biomechanics in prevention of overexertion injuries[J].Ergonomics,2009,52(1):3-14.
[4] Chaffin D B.Digital Human modeling for workspace design [J].Reviews of Human Factors and Ergonomics,2008,4 (1):41-74.
[5] Marras W S,Radwin R G.Biomechanical modeling[J].Reviews of Human Factors and Ergonomics,2005,1(1):1-88.
[6] Erdemir A,Mclean S,Herzog W,et al.Model-based estimation of muscle forces exerted during movements[J].Clin Biomech(Bristol,Avon),2007,22(2):131-54.
[7] Damsgaard M,Rasmussen J,Christensen S T,et al.Analysis of musculoskeletal systems in the AnyBody Modeling System[J].Simulation Modelling Practice and Theory,2006,14 (8):1100-1111.
[8] Graupe D.Recognition and prediction of individual and combined muscular activation modes via surface EMG analysis [J].European Journal of Translational Myology,2010,20 (3):131-138.
[9] Si H,Liao Q,Zhang W.Monte Carlo based predictive method for determining work envelope of spacesuit in EVA operation[J].Mechatronics and Automatic Control Systems 2014,237:583-590.
[10] 杨锋,袁修干.舱外航天服动力学模型[J].航天医学与医学工程,2002,15(6):453-454. Yang Feng,Yuan Xiugan.A Dynamic Model of the Extravehicuar Activity SpaceSuit[J].Space Medicine&Medical Engineering,2002,15(6):453-454.(in Chinese)
[11] Frazer A L.Modeling Human-Spacesuit Interactions[D]. Massachusetts Ave,Cambridge:Massachusetts Institute of Technology,2003.
[12] Fluit R,Andersen M S,Kolk S,et al.Prediction of ground reaction forces and moments during various activities of daily living[J].J Biomech,2014,47(10):2321-9.
[13] Jung Y,Jung M,Lee K,et al.Ground reaction force estimation using an insole-type pressure mat and joint kinematics during walking[J].Journal of biomechanics,2014,47 (11):2693-2699.
[14] Raez M B,Hussain M S,Mohd-Yasin F.Techniques of EMG signal analysis:detection,processing,classification and applications[J].Biol Proced Online,2006,8:11-35.
Predicting Muscle Activation in Typical Functional Tasks of EVA
WANG Xiaodong,WANG Zheng,LI Hao,LI Fan,LIU Zhizhen,WANG Chunhui
(China Astronaut Research and Training Center of China,Engineering National Laboratory of Human Factors Engineering,Beijing 100094,China)
This paper aims to predict the muscle activation of astronauts in EVA for ergonomic assessment of their physical states.Typical functional tasks such as pull,push,press and lift in various places were conducted by 9 participants in both spacesuit-unsuited and suited conditions to collect maximum force and sEMG(surface electromyography)of RT Biceps BR.,LT LAT.Triceps and RT ANT.Deltoid.Muscle activations in these functional tasks were predicted based on the proposed framework of human-spacesuit integrated biomechanical modeling.Model predictions were validated through the Pearson correlation analysis between predicted muscle activations and measured sEMG.The proposed human-spacesuit integrated biomechanical modeling offers a new insight into human-spacesuit interaction and physiological bases for EVA planning.
extravehicular activity(EVA);EVA spacesuit;biomechanical modeling;muscle activation;Any Body;ergonomics
R337
A
1674-5825(2015)05-0510-06
2015-04-15;
2015-08-20
国家重点基础研究发展计划(2011CB711000);中国航天医学工程预先研究项目(2011SY5405002);人因工程重点实验室基金项目(HF2013-Z-B-02)。
王晓东(1990-),男,硕士研究生,研究方向为航天人因工程、人-舱外服运动生物力学建模。E-mail:sjtuwxd@163.com
王春慧(1971-),女,硕士,研究员,研究方向为航天工效学。E-mail:chunhui_89@163.com