并联混合有源电力滤波器死区效应及补偿新策略
2015-12-14张现帅王少杰陶耀寰
张现帅,王少杰,陶耀寰
(邵阳学院机械与能源工程系,湖南邵阳422000)
随着社会的发展与不断进步,电力电子装置不断被应用于各个行业,现在电力电子技术得到了极大的发展,但是在发展的过程中,电力系统中的谐波污染也日益严重,如果不能得到处理会给电网系统带来极大的危害[1].为了解决谐波污染问题,目前有源电力滤波器得到了极为广泛的应用,然而变流器在进行谐波补偿时会出现死区效应,死区效应的产生会对变流器造成不必要的损坏.为了防止设备的损坏必须加入死区时间,加入死区时间后,PWM信号不能理想地控制变流器主电路开关元器件的开通与关断,导致变流器输出的谐波电流与理想的谐波电流产生一定的偏差,从而使补偿效果不理想,为了使补偿效果更加理想,本文采用新的补偿方法进行死区补偿[2-3].
1 死区效应分析
变流器主电路的开关元器件一般都是采用绝缘栅双极晶体管(IGBT).在主电路工作时,利用IGBT互补的开通与关断进行工作来滤除电网中的谐波,IGBT具有一定的开通与关断时间,当变流器的主电路进行工作时,主电路同一个桥臂上的两个IGBT开关元器件会不停的交替开通与关断,理想情况下是上桥臂开关元器件关断时,下桥臂开关元器件就立刻开通,但是它们存在一定的开通与关断时间,在PWM信号驱动上桥臂关断和下桥臂开通时,因上桥臂的IGBT具有一定的关断时间,所以上桥臂没完全关断时下桥臂的IGBT就开启,就会造成主电路的损坏.所以在上桥臂处于关断时间时必须设置死区时间以防止主电路的直通.
在进行死区分析时,以并联混合型有源电力滤波器为例进行分析,该拓扑结构是由无源滤波器组、有源滤波器、耦合变压器、注入电路、输出滤波器组成,谐波电流检测方式采用瞬时无功功率理论,其整体工作电路如图1所示,由图1可以看出变流器的工作方式[4-5],以假想点N'为中心,设定电流流出变流器的方向为正方向,流入变流器的方向为负方向,在本文中,以a相桥臂为例进行分析,当UAN'=Ud/2时即为a桥臂中的V1的导通区间,其中若ia<0 则 VD1导通,V1关断;若 ia>0 则 V1导通,VD1不续流.当 UAN'=-Ud/2 时,则为桥臂 a 中的V4的导通区间,若ia>0则VD4导通续流,V4是处于关断状态的;若ia>0则V4导通,VD4不续流.

图1 并联混合型有源电力滤波器模糊PID死区补偿原理Fig.1 Fuzzy PID dead zone compensation for Parallel Hybrid Active Power Filter
三相桥式电压型逆变电路的工作波形如图2所示,这里以逆变电路的A相和B相为例进行分析,UrA、UrB为A相B相的调制波电压信号,它们与载波信号调制之后得到PWM波形,图2-a为调制信号与载波信号的调制方法,图2-b为以A相、B相为例的理想输出波形,图2-c为A相带死区时间的实际输出的PWM波形,图2-d为理想输出波形与实际输出波形的误差波形和A相输出电流,图2-e为A相与B相的线电压UAB.

图2 PWM调制及误差波形图Fig.2 PWM modulation and error waveforms
由图2-d可以看出当ia>0时,在开关元器件的开通与关断进行转换时,当由Ud/2转换为-Ud/2时,实际输出波形比理想输出波形少了时间为td/2(td为死区时间)、电压为Ud的波形误差.当电压由-Ud/2转换为Ud/2时也是与上述结论一样.当ia<0时,电压在进行正负转化时实际输出波形比理想输出波形多出了时间为td/2,电压为Ud的波形误差.因此可以利用面积等值原理求出平均误差Ue.
由图2-a和图2-d可以得出在一个调制波周期T1内有2N个误差波,N为载波比,当ia>0时,时间t=T1/2,由图2-d双边死区对称可知误差波个数为N,利用面积相等可以求出此时的平均误差为Ue1,如式(1)所示:

同理,当Ia<0时,可以求出此时的Ue2,如式(2)所示:

综合上述公式可以得出其平均误差Ue,如式(3)所示:

其中,td为死区时间,T1为调制周期,t=T1/2,N为载波比,Ud为直流侧的电容电压.
2 自适应模糊PID控制
在工业控制中,无论控制的对象有多么复杂,大多数的控制都会采用PID控制,但是经典PID控制有一定的局限性,于是在后来的发展过程中又提出了更加灵活的自适应模糊PID控制[6-7].在此处进行死区补偿时就采用了该控制方法,控制结构图如图3所示.

图3 模糊PID工作原理图Fig.3 The operating principle of Fuzzy PID
由上述分析可知实际补偿电流因死区时间的原因会与理想的补偿电流有一定的误差,这里以电网中的A相为例进行分析.首先以实际补偿电流iah和理想的补偿谐波电流i*ah进行比较得到其误差e,再对误差e求导得出其误差变化率ec,把e和ec作为输入,对其进行模糊化得到E和EC,然后根据模糊推理规则得出增量△Ki,△Kp,△Kd,把推理出的增量与预整定参数相加得出新的Kp,Ki,Kd,经过模糊PID控制器后得出的新的调制信号,然后经过PWM调制电路后输出PWM信号重新控制主电路的IGBT的关断得出新的谐波补偿电流,进而实现对死区的实时补偿[8-9].
在连续时间域上,PID控制器具有如下形式,如式(4)所示:

将上述式子离散化之后可以得到离散线性PID控制器的公式,如式(5)所示:

因为模糊控制器是非线性的,PID控制器的离散结构式不易于实现,为了使之接近线性结构,所以在这里采用增量式的形式,根据式(5)可以求出△i(k),如式(6)所示,其中i(k)为系统时间k时采样的数据电流值,i(k-1)为时间k-1时的采样数据电流值.

这里输入变量的隶属函数采用较为灵活的三角形函数,输出变量采用三角函数和高斯函数相结合的方式,其分布图如图4和图5所示,其基本论域为[-3,3],将其离散成7个等级[-3,-2,-1,0,1,2,3],其对应的语言变量分别为负大[NB],负中[NM],负小[NS],零[Z],正小[PS],正中[PM],正大[PB].

图4 E、EC隶属函数图形Fig.4 Membership function graphic of E and EC
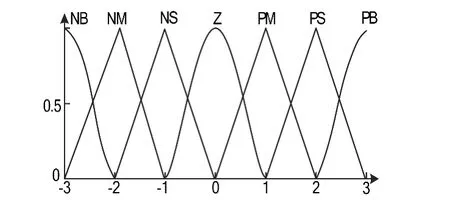
图5 ΔKp、ΔKi、ΔKd隶属函数图形Fig.5 Membership function graphic of△Kp、△Ki、△Kd
进行谐波补偿时根据检测出的实际补偿电流与理想补偿电流产生的误差e和其偏差变化率ec来确定ΔKp,ΔKi,ΔKd,其变化规则是根据模糊化后的E和EC的变化而有不同的取值.在PID控制中,Kp的作用是加快系统的响应速度并提高调节精度,Ki可以消除系统的稳态误差,Kd则可以改善系统的动态特性.当e值较大时,此时系统应处于快速响应状态,为了使系统加快响应而具有快速的追踪性,应加大Kp的取值,但是为了避免出现较大的超调,此时Ki应取较小的值或0,而为了避免偏差e瞬时变大而出现的微分过饱和,Kd的取值应小一些.当e值处于中等时,此时e不是特别大,不必取过大的Kp而加快追踪速度,此时Kp,Ki,Kd取值适中即可.当e较小时,此时系统接近所需的取值,因此具有一定的波动性,为了加强系统的稳定性Kp,Ki取值应大些,同时为了避免出现震荡,此时Kd的取值决定于ec.所以依此我们总结了49条规则,形式如下格式:
If(E is)and(EC is)then(Kpis),(Kiis),(Kdis).具体规则如表1 所示.
3 仿真分析
此结构可以有效地治理非线性负载产生的谐波污染.为了证明结论正确性,本文采用Matlab软件进行仿真,系统用10 kV、频率为50 Hz的交流电压进行仿真分析,负载参数:电阻为10 Ω,电感为1mH.图6为负载端电流波形和频谱分析,图6中,a图是加入死区后未进行死区补偿的FFT分析,b图是采用模糊PID控制进行死区补偿的FFT分析.由图可知模糊PID控制方法具有较好的补偿效果,非线性负载引起的5、7、11、13次谐波都有了明显的改善,而且THD(畸变率)有一定的下降,对死区补偿起到了较好的效果.

图6 负载端电流波形和频谱分析Fig.6Current waveform and spectrum analysis on load-side
4 结语
本文对有源电力滤波器的死区进行了分析,根据死区的机理和有源电力滤波器的特点,提出了模糊PID控制补偿新方法,该方法有较好的稳定性且易于实现,仿真分析证明了模糊PID控制补偿新方法能有效地进行死区补偿,降低谐波,达到了提高了电网的稳定性的目的.
[1]王兆安,杨军,刘进军,等.谐波抑制和无功功率补偿[M].北京:机械工业出版社,2005.
[2]朱朝文,袁海文,刘炳民,等.有源电力滤波器主电路死区效应及补偿策略[J].电力电子技术,2013,47(1):82-85.
[3]王兆安,刘进军.电力电子技术[M].北京:机械工业出版社,2009.
[4]余凤兵,梁冠安,钟龙翔.无死区控制在并联型有源电力滤波器中的应用[J].现代电力,2006,23(1):40-43.
[5]李达义,孙玉鸿,熊博.一种并联型有源电力滤波器的新型控制方法[J].电力系统自动化,2014,38(15):112-117.
[6]刘建华,梁华洋,宋祖磊,等.基于模糊控制的三电平有源电力滤波器研究[J].工矿自动化,2013,39(6):77-80.
[7]何正义,季学武,瞿文龙.一种新颖的基于死区时间在线调整的SVPWM补偿算法[J].电工技术学报,2009,24(6):42-47.
[8]诸静.模糊控制理论与系统原理[M].北京:机械工业出版社,2005.
[9]刘栋良,武瑞斌,张遥,等.基于模糊控制零电流钳位逆变器死区补偿[J].电工技术学报,2011,26(8):119-123.
