基于MOSES软件的挖沟机工程船锚泊分析
2015-12-14马洪新李海鲸
马洪新,王 磊,刘 坤,戴 源,李海鲸,曹 宇
(1.海洋石油工程股份有限公司,天津 300461;2.浙江大学,杭州 310058)
基于MOSES软件的挖沟机工程船锚泊分析
马洪新1,王 磊1,刘 坤1,戴 源1,李海鲸1,曹 宇2
(1.海洋石油工程股份有限公司,天津 300461;2.浙江大学,杭州 310058)
海底管道挖沟埋设是提高海底管道在位稳定性及对管道进行保护的重要措施,为保证挖沟作业过程中的安全性,施工前需对工程船的锚泊情况进行分析。应用MOSES软件对挖沟机工程船进行了典型工况的锚泊计算,阐述了应用MOSES软件进行锚泊计算的基本方法。并进一步对波浪参数、锚泊参数及船舶惯性半径等参数的变化对锚泊系统的影响进行了分析,得到影响曲线,总结出若干规律,对类似工程船的锚泊布置有一定指导意义。
锚泊;MOSES;挖沟机工程船
0 引言
在海底管道后挖沟作业过程中,载有挖沟机的工程船需沿海底管线移动,虽有自航能力,但相对于挖沟作业需求来说,工程船航速过快,不易控制,且稳定性不能保证。为此,在管道挖沟作业过程中,需要通过锚泊对工程船进行定位,并通过锚缆的拖拽实现工程船的缓慢移动。因此,在施工之前,需要对船舶的锚泊情况进行分析,以保证施工过程安全。
船舶的锚泊分析是一个耦合分析的过程,既包括流体作用于船舶的水动力,又包括船舶移动导致的不断变化的系泊力[1]。不同于其他海洋船舶的系泊,挖沟机工程船对在位稳定性要求很高,而且在挖沟作业过程中,工程船的移动会导致锚泊状态的变化。在施工运动过程中,由于船舶的运动缓慢[2],可近似认为每一个状态均为稳定状态,即假设速度为零,这种假设可以极大简化数值模拟的难度,同时也不会产生较大的计算误差,文中计算均在此静态假设的基础上进行。
1 锚泊计算流程
MOSES软件是Ultramarine公司开发的用于海洋浮式结构设计分析的商业软件。从20世纪70年代软件产品发布以来,很多深海结构的分析、设计、制造以及施工安装等专业的工程师们就开始使用MOSES软件[3]。进行浮体的锚泊分析是MOSES软件的一项基本功能[4],其分析流程如下。
首先,对所分析的船舶建模,包括船舶外形尺寸,以及船舶的质量信息,如重量重心,沿各轴的惯性半径。船舶的模型信息在模型文件(.dat文件)中完成,对于锚缆的模拟在命令文件(.cif文件)中进行[5]。在建模过程中,可通过INMODEL命令来读取模型文件,在软件界面中观察模型情况,以便及时修正。
模型文件建立好后,可进入命令文件的编写,锚泊的模拟计算过程均在此完成。首先读取模型文件,定义船舶的初始浮态,如吃水、横倾、纵倾。之后进行锚缆的布置,包括导缆孔位置的定义、缆绳属性及尺寸的定义、锚点的定义。在此过程中有两种方式定义系泊状态,一为直接定义锚点及缆绳长度,软件根据设定值计算锚缆张力;二为设定锚缆的预张力,软件根据张力进行锚点位置及缆绳长度的计算。对于非对称型锚泊情况,此过程需要不断调试来完成,从而实现锚缆的合理布局。
锚缆设计完成后,即可进入到分析计算过程。首先计算该船型的水动力参数(附加质量系数、线性化阻尼系数、线性化波频力),作为后续计算的基础。之后设置环境参数(波浪谱、波浪周期、波高、浪向、风速、流速),进行静力计算。此过程将环境载荷静力化,可对稳定状态的锚缆受力情况进行静力计算,得到船舶的静平衡状态。完成以上计算内容后,软件将对船舶进行RAO计算,并进行频谱分析,软件会根据指定的频谱、波频率等参数,由规则波拟合出时域分析波型,得到该不规则波后即可进行时域分析。整个分析过程中,所产生的计算数据均可在结果文件中给出。
2 挖沟机工程船锚泊计算算例
采用MOSES软件,对渤海湾某挖沟机工程船进行锚泊计算。考虑到船舶的对称性,计算针对某一典型锚泊情况,对该船在0度、30度、60度、90度、120度、150度、180度的浪向下进行系泊分析。计算所用船舶及锚缆基础参数如表1和表2所示。

表1 船舶基本参数表

表2 系泊缆属性表
在分析过程中选用坐标情况如下:船首处坐标为(0,0,0),船长方向为X轴,船尾为正;船宽方向为Y轴,右舷为正;船深方向为Z轴,向上为正。锚泊布置情况如图1所示,采用8锚布置形式,每个锚点连接两个锚缆,两个锚缆间夹角为30度,锚缆与局部坐标轴的最小夹角均为30度。

图1 船舶系泊及浪向示意图
计算中采用环境参数如表3所示。

表3 作业环境参数表
对于锚泊分析的计算结果,主要关注两方面的问题:锚缆的系泊力及船体的运动响应。前者要求锚缆的拉力在破断拉力以内,且有一定的安全裕度,后者需要船舶在施工过程中有足够的稳定性,即船舶的运动响应在施工需要的范围之内。锚缆受力及船舶运动响应的计算结果统计值如表4和表5所示。
计算结果表明,该系泊状态下,所有锚缆均在90度浪向的作用下出现张力最大值,其中line g的值最大,为166.88吨,此值小于所用锚缆的破断拉力,认为锚缆处于安全状态。由船舶运动响应计算结果可得,该船在90度浪向下运动响应最明显,最大横摇角为5.47度,横荡最大位移为1.12米。这是由于该型船舶为细长型,在90度方向下,波浪流三种载荷的受力面积均达到最大,而该方向下,船舶自身的回复力为最小,因此在此方向船舶的横向运动响应明显。类似的船型均满足这种规律,所以,在施工时应尽量避免船舶横向受浪。

表4 锚缆张力最大值计算结果
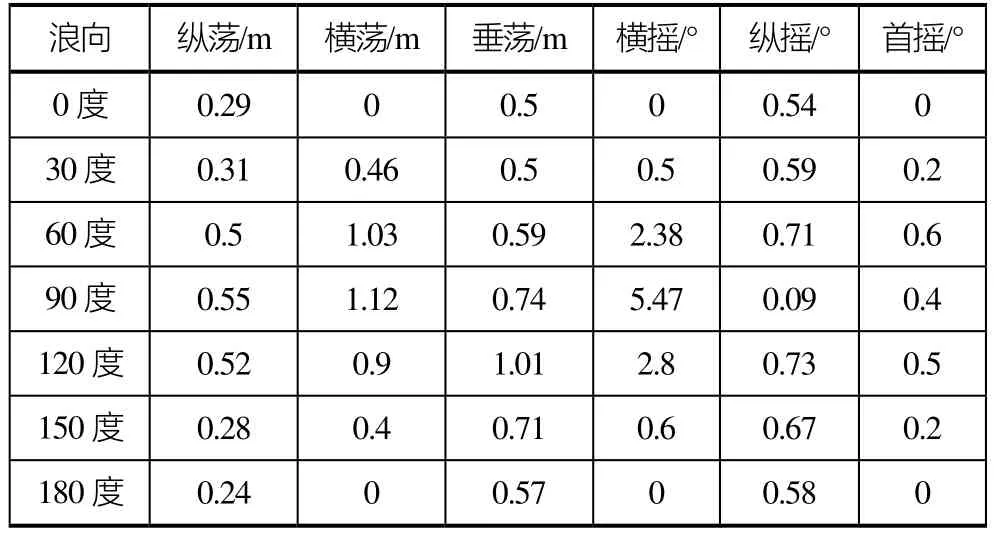
表5 船舶运动响应最大值计算结果
3 不同工况下锚泊情况分析
以上介绍了应用MOSES软件进行挖沟机工程船锚泊分析的一般步骤,并对某挖沟机工程船进行了典型锚泊情况分析。另一主要内容为研究船舶装载情况及波浪参数的变化对锚泊系统的影响,基本方法为,在以上计算的基础上,变动某一参数后进行锚泊分析,参数包括有义波高、波浪平均周期、锚缆长度、锚缆预张力,船舶的惯性半径。通过以上计算可知,该船舶在90度浪向的情况下锚缆张力最大,运动响应最明显,后文统一选用90度浪向为载荷方向。
3.1 波浪的影响
考虑波浪参数的变化对船舶系泊的影响,以90度浪向下的锚缆最大张力为衡量指标,分析有义波高及波浪平均周期的变化对船舶系泊情况的影响。经计算,提取结果数据绘图如图2和图3所示。
由以上两曲线可直观得到,随着有义波高和波浪平均周期的增加,锚缆的最大张力均随之增长,因此,在施工时应避开有义波高及波浪平均周期较大的海况。
3.2 锚泊布置的影响
锚缆长度及锚缆预张力是锚泊设计的基本参数,二者的变化均会导致锚点位置的变化,从而改变锚缆的形状,对船舶产生不同的约束力。
3.2.1 锚缆长度的影响
考虑锚缆长度的变化对船舶系泊的影响,以90度浪向下的船舶的最大横向位移为衡量指标,分析锚缆长度的变化对船舶系泊情况的影响。经计算,提取计算结果绘制曲线如图4、图5和图6所示。
由图4可得,随着锚缆长度的增加,锚缆的最大张力大体呈下降的趋势。图5表明,随锚缆长度增加,船舶的最大横向位移大体呈增大的趋势,但是在锚缆长度小于400米时,船舶最大横向位移与锚缆长度之间没有明确关系,在锚缆长度大于此值后,才有明显的递增关系。同样,图6也呈现出这种规律,只有在锚缆大于某一长度(文中约为 340米)时,船舶最大横摇角随锚缆长度的增加才呈现递减规律;在锚缆长度小于该值时,并没有明显的变化规律。

图2 锚缆最大张力—有义波高曲线
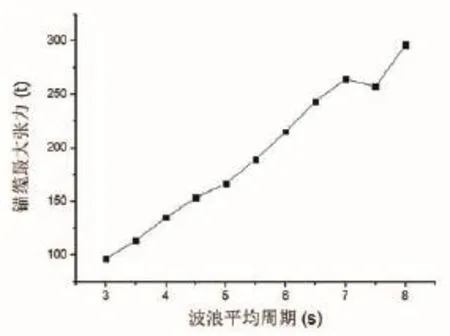
图3 锚缆最大张力—波浪平均周期曲线
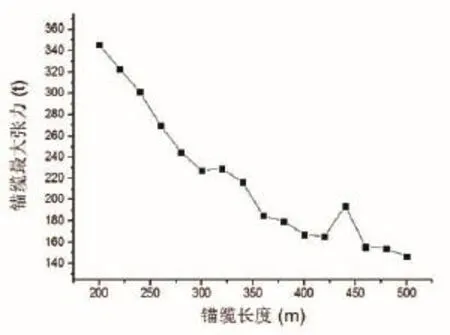
图4 锚缆最大张力—锚缆长度曲线

图5 船舶最大横向位移—锚缆长度曲线
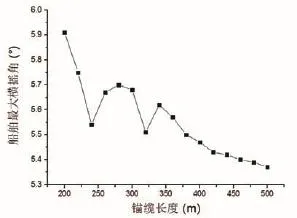
图6 船舶最大横摇角—锚缆长度曲线
综上可得如下规律:在锚缆预张力相同时,锚缆长度越小,锚缆的最大张力越大,但对船舶的平移和摇摆的约束没有直接影响。当锚缆长度大于某一值后,锚缆长度增加对其最大张力影响无明显规律,对船舶横向位移的约束效果减弱,对船舶摇摆的约束增强,但从数值上来看效果并不明显。
3.2.2 锚缆预张力的影响
考虑锚缆预张力的变化对船舶系泊的影响,以90度浪向下的船舶的最大横向位移及最大横摇角为衡量指标,分析锚缆预张力的变化对船舶系泊情况的影响。经计算,提取计算结果绘制曲线如图7和图8所示。

图7 船舶最大横向位移—锚缆预张力曲线

图8 船舶最大横摇角—锚缆预张力曲线
由以上两图可得,当锚缆长度一定,锚缆预张力增大时,船舶的最大横向位移逐渐减小,不同的是,当预张力在约30吨以内时,减小的效果显著;预张力大于此值时,变化不明显。同样,在预张力小于约30吨时,船舶最大横摇角也随锚缆预张力增加显著减小;大于此值后,船舶的最大横摇角变化没有明显规律。
3.3 惯性半径的影响
由以上发现,锚缆的长度及预张力的变化均对船舶的横摇角度没有较明显的抑制作用,因此,对船舶的惯性半径对船舶摇摆的影响进行分析。所计算船型的横摇运动明显,因此,此处考虑船舶X轴的转动惯性半径的变化对船舶横摇的影响。分析时,仅考虑船舶X轴转动惯性半径的变化,得到曲线如图9所示。

图9 船舶最大横摇角—船舶X轴惯性半径曲线
由曲线可知,当船舶的惯性半径小于10时,惯性半径的变化对船舶最大横摇角的影响较小,且没有明显规律;当该值大于10之后,船舶的最大横摇角随该船X轴惯性半径的增大显著下降。因此,为使船舶的摇摆运动减缓,增大其对应轴的惯性半径是有效途径。
4 结论
阐述了应用MOSES软件进行船舶锚泊分析的一般流程,并对所计算挖沟机工程船进行了典型的锚泊计算;在前文计算的基础上,对影响该船锚泊情况的条件进行了分析,得到如下结论:(1)有义波高及波浪周期的增加均会使船舶的运动增加,从而导致锚缆张力的增大;(2)锚缆长度的变化对船舶的运动约束影响不明显,而锚缆预张力在一定范围内的增加会显著提高系泊船舶的平移稳定性;(3)船舶惯性半径的增加能够显著提高船舶的摇摆稳定性。
[1]郑瑞杰.锚泊系统受力分析[D].大连理工大学,2006.
[2]冯刚,吴海帆,等.工程船锚泊移位系统的最优控制策略及拟静力分析[J].海洋工程,2001.
[3]李怀亮,徐慧,等.MOSES软件在系泊浮体运动计算中的应用研究[J].海洋工程,2013.
[4]张楠.漂浮式潮流电站叶轮与锚泊系统设计研究[D].哈尔滨工程大学,2010.
[5]MOSES MANUAL.www.ultramarine.com.
Mooring Analysis of Trencher Engineering Ship Based on MOSES Software
Ma Hong-xin1,Wang Lei1,Liu Kun1,Dai Yuan1,Li Hai-jing1,Cao Yu2
(1.Offshore Oil Engineering Corp,Tianjin 300461,China; 2.Zhejiang University,Hangzhou 310058,China)
Trenching and embedment are important measures to increase the subsea pipeline’s on-bottom stability and the ways to protect pipeline.To ensure safety during the trenching operation,the mooring analysis of the engineering ship is necessary before construction.The typical mooring analysis of trencher engineering ship is analyzed using MOSES software,and the basic calculate method is stated.Furthermore,the influences of variations of wave parameters,mooring parameters and ship radius of inertia to mooring system are analyzed.The influence curves are got,and the laws are summarized,which have guiding significance for similar engineering ships.
mooring; MOSES; trencher engineering ship
U674.3
A
10.14141/j.31-1981.2015.06.007
马洪新(1979-),男,高级工程师,研究方向:海洋石油工程。