一种基于方位谱重采样的大斜视子孔径SAR成像改进Omega-K算法
2015-12-13怀园园李震宇邢孟道
怀园园 梁 毅 李震宇 邢孟道
1 引言
随着合成孔径雷达(Synthetic Aperture Radar,SAR)成像技术的发展,实时性成为很多成像系统的必备要求,而子孔径成像概念的提出使成像分辨率与成像效率达到一种平衡。子孔径数据成像具有数据录取时间短的特点,保证了实时性,同时避免了由于长时间录取数据而导致的方位向相位误差增大的缺陷[1],最终可通过子孔径数据之间的相干处理,实现高分辨成像,因此针对子孔径数据成像的研究具有重要意义。
对于SAR的斜视子孔径成像,人们提出了很多算法[24]-,但这些算法都存在或多或少的近似。而Omega-K等波数域算法,因其可以不加其他近似条件实现无几何形变的完全聚焦[5],具有更高的精准度[6,7]。文献[8,9]推导了斜视模式下回波信号的精确2维波数谱,但忽略了支撑区的斜拉带来的影响,较大的斜视角将会使成像质量降低;文献[10]提出了一种斜视聚束SAR扩展两步式聚焦的方法,同样较大的斜视角将会导致相位误差过大,因此不适于大斜视成像;文献[11]提出了一种改进波数域算法,在方位位置域进行压缩处理以增大成像测绘带宽度,但该算法无法应用于子孔径成像;文献[12]提出了一种斜视TOPS SAR子孔径成像方法,需要将子孔径数据在方位时域进行适当扩展,加剧了处理数据量和复杂程度。
本文针对斜视子孔径数据的条带模式成像提出一种改进Omega-K算法。通过分析斜视成像2维波数谱支撑区的斜拉特性,结合坐标旋转及方位谱重采样的方法实现波数谱的“正侧化”,进而达到支撑区利用的最大化,提高成像质量。考虑子孔径数据波数谱支撑区的窄带状特点,方位向成像无法应用传统Stolt插值在空间位置域实现精确聚焦,我们通过扩展插值将距离向与方位向解耦合,并对距离向在距离位置域聚焦,方位向在波数域聚焦,同时该操作使各点目标的相位-波数变化率分布线在空间位置域对齐,解决了子孔径数据方位向的统一加窗问题。点目标的仿真数据及实测数据处理验证了本文算法的有效性和实用性。
2 成像几何模型及2维波数谱推导
大斜视SAR成像几何模型如图1所示,雷达工作于条带模式,载机以水平速度v沿X方向飞行。θ0为波束中心斜视角,θBW为方位向波束宽度,H为飞行高度,目标与载机飞行轨迹的最近距离为 RB,R0为波束中心扫过目标时的斜距,点B为场景中心点, Xn为点目标P点沿方位向与点B的距离。
由几何关系可知,点P的瞬时斜距为

为方便后续波数域分析,这里采用空间位置域斜距表达式。由式(1),容易得到目标的回波信号表达式为

式(2)中 Rr为距离向位置变量,c为光速,γ为发射信号的调频率,λ 为载波波长, wr( Rr) 和 wa(X) 分别为距离窗函数和方位窗函数。对式(2)进行距离向傅里叶变换(FFT),将其变换到距离波数域,得

其中 Kr为距离波数, Wr( Kr)为距离窗的波数域形式, Krc= 4π fc/c 。进一步对式(3)做方位FFT,将其变换到方位波数域,得到完整的2维波数谱表达式。

式(4)中 Kx为方位波数, Wa( Kx) 为方位窗的波数域形式。
3 基于方位谱重采样的大斜视子孔径 SAR成像改进Omega-K算法
传统的波数域Omega-K算法,其核心在于通过Stolt插值2维耦合,进而通过选取支撑区内一定矩形区域做2维逆傅里叶变换(IFFT)实现空间位置域的成像。但该算法不适于大斜视成像,尤其采用子孔径数据处理时。本文提出一种基于方位谱重采样的子孔径SAR大斜视成像的改进算法,下面进行具体介绍。
3.1 波数谱“正侧化”处理
3.1.1 成像坐标轴旋转 对于斜视成像,由于受较大斜视角的影响,插值后的波数谱支撑区偏斜较大(图2(a)中两支撑区对应不同的斜视角,分别为θ1和θ2),其内矩形阴影区域的选择随斜视角的变化受到不同程度限制,导致可选取区域的面积相对较小,对最终成像质量有较大的影响,难以满足分辨率要求。针对该问题,文献[13,14]提出了一种沿视线方向的插值方法,其操作需要将2维波数域坐标系进行旋转,通过两次插值处理,将其支撑区旋转成正侧视的情况,这样大大增加了算法的运算量。联想到传统斜视处理时域校正距离走动方法可以实现成像坐标轴的旋转[14],因此对式(3)乘以一个线性相位校正函数,就可以达到“扳正”波数谱支撑区的效果(图 2(b)坐标系所示),实现矩形支撑区选择的最大化。具体做法如下:



图1 斜视SAR成像几何模型
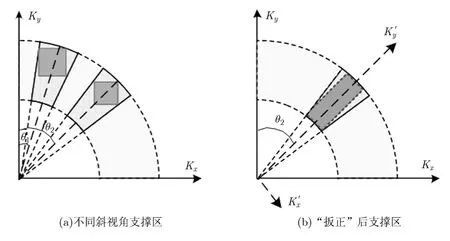
图2 斜视成像 K x -K y平面波数谱支撑区示意图
相对于原始的斜拉2维谱,经过校正函数相乘后的2维谱得到了“扳正”。分析式(5)中的指数项Φ(Kr,X)=-Kr[R( X ) + X s in θ0], 将 R ( X; R0) 在X = Xn处展开,即可以看出,经过线性校正后,斜距中的一次走动项被消除,同时补偿了回波多普勒中心,这个过程不仅将支撑区有效地向中心“扳正”,同时能够显著地减小需要的脉冲重复频率(PRF),进而减小运算量。3.1.2方位波数域重采样校正方位空变 在上一节中,通过引入旋转校正函数将斜视2维波数谱“扳正”,但伴随的会带来方位调频率的空变问题[15],使方位平移不变性不再成立。为了解决该问题,需要对校正后的2维波数谱进一步分析。这里对式(5)进行方位傅里叶变换,将其变换到方位波数域;同时,由于线性走动校正的影响,使得目标的距离由原来的 R0变为新的= R0+ Xnsin θ0,整理后得到

由式(7)指数项的第 1项可以看出, Xn与方位向波数 Kx的二次项相耦合,表明方位向聚焦具有空变性质,这一结果与之前的分析相吻合。为了消除方位聚焦的这种空变,达到方位统一聚焦处理,这里采用一种波数域方位重采样的方法,即通过方位向插值引入新的变量,使得


显然,式(9)呈现出正侧视波数谱的形式。由此可以看出,在对多普勒中心及走动校正,并通过方位向重采样插值处理消除方位空变后,原斜视点目标的2维波数谱已完全等效为正侧视的情况。
3.2 子孔径数据成像处理
3.2.1 传统 Omega-K 算法失效性分析 传统的Omega-K算法采用Stolt插值实现距离、方位的2维解耦合,对于式(9),Stolt插值核为

经过插值后的2维波数谱可以表示为

之后采用距离 IFFT即可实现距离位置域的聚焦。而对于子孔径数据,直接方位 IFFT将会造成方位位置的模糊。图3给出了距离向聚焦后同一距离单元内的3个点目标(A( X-n),B( X0),C( X-n))的相位-波数变化率分布线,由于相位变化率轴支撑区对应的是位置支撑区(Xsub),子孔径数据反映的位置支撑区较小,直接方位 IFFT投影将会造成成像位置的模糊,从图 3可以看出,点A, C投影位置已超出子孔径数据的位置支撑区,进行方位 IFFT后,其方位位置在纵坐标轴投影将会出现在错位位置,无法反映真实的方位位置关系。一种避免方法是在插值解耦合之前对数据补零,扩展位置支撑区,使其覆盖方位向场景宽度,但这会造成处理点数增加,恶劣时带来运算量的急剧增大。另一方面,由于各点的相位-波数变化率分布线彼此错开,也会造成无法统一加窗进行旁瓣抑制,因此对于子孔径数据,传统的Omega-K处理算法将不再适用。

图3 传统算法的相位-波数变化率分布线
3.2.2 改进的Omega-K算法 由于传统的Omega-K算法在处理子孔径数据时失效,这里提出一种改进的Omega-K算法,其创新思想是能够对子孔径数据在方位向进行统一加窗处理,并在方位波数域实现方位聚焦成像。
(1)一致补偿处理: 对式(9)进行方位一致聚焦补偿,对其乘以相位函数

其中sR为场景中心对应的参考距离,一致补偿处理将距离向位置调整到以场景中心为参考。
(2)扩展 Stolt插值: 经过一致补偿处理后的信号,接下来进行扩展Stolt插值,令

扩展Stolt插值保留了方位波数项,便于方位波数域聚焦。经过扩展Stolt插值后的2维波数谱表示为

可以看出,此时距离、方位已解耦合,且方位相位不再只是波数的一次函数,而是包含的调制项。
(3)距离聚焦处理: 观察式(14)的 2 维波数谱表达式,距离向相位只存在 Ky的线性项,因此对式(14)做距离IFFT即可实现距离向的聚焦。距离脉冲压缩后的信号表示为
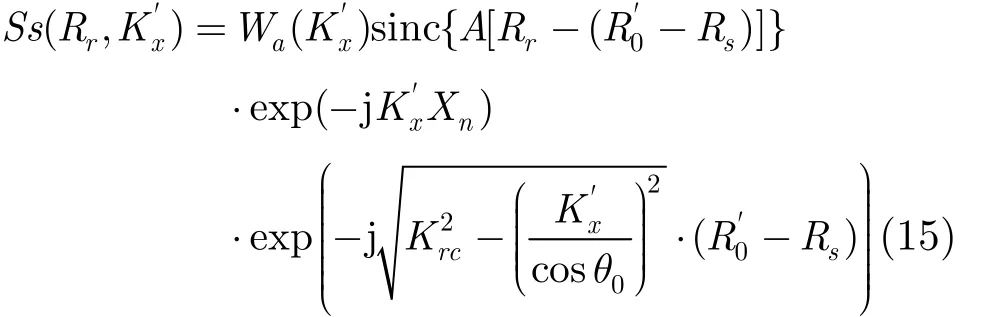
式(15)中,A为常数,这里距离向的目标位置以场景中心为参考。
(4)“去斜”处理: 式(15)中,方位波数域相位包含波数的高次项,其相位-波数变化率分布线将是具有一定斜率的直线,如图 4(a)所示。可以看出,3条分布线在波数轴及相位波数变化率轴(纵轴)的投影均是错开的,这里讲的“去斜”处理即是消除相位-波数变化率分布线沿纵轴投影的错位。为此,对式(15)乘以统一的“去斜”校正函数:


“去斜”处理后的信号表示为

接下来,对(17)式做方位IFFT处理,得到

如图4(d)所示,此时方位位置域的相位-位置变化率分布线在位置轴的投影是对齐的,这种对齐使得方位统一加窗进行旁瓣抑制变得可行,并且具有相同的斜率 - k = ( Krccos2θ0) /。
(5)方位波数域聚焦成像: 为了实现方位波数域成像,需要将图4(d)中的相位-位置变化率分布线沿位置轴“扳直”,由于斜率已知,很容易构造方位位置域校正函数:
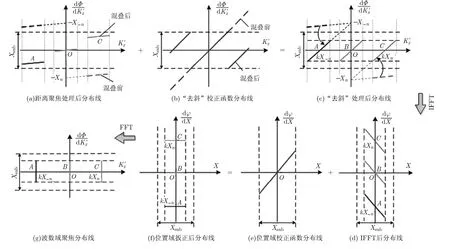
图4 改进算法的相位-波数/位置变化率分布线变化示意图

该函数的相位-位置变化率分布线如图4(e)所示,与图4(d)中的分布线相比具有相反的斜率,“扳直”处理后的信号为

该信号的方位相位只含有方位位置的一次项,对应的相位-位置变换率分布线为一平行于位置轴的直线,如图4(f)所示,进一步作方位FFT即可实现方位波数域的聚焦,结果为

其中B为与子孔径长度有关的一个常数。需要说明的是,如果要在方位波数域抑制旁瓣,则可在FFT前进行加窗处理,由于数据在位置域已经对齐,加窗对所有点是统一进行的。
至此就完成了对于子孔径数据的距离位置域、方位波数域的聚焦处理,整个算法的处理流程如图 5所示,对于其中的方位重采样处理可以采用sinc插值核来快速实现。

图5 改进Omega-K算法处理流程图
4 成像处理结果
4.1 点目标数据仿真
下面,通过对点目标回波仿真数据的处理来验证本文系统仿真算法的有效性。
雷达系统仿真参数如表1所示,图6给出了点目标分布的空间几何模型。A, B, C为进行性能指标分析的远距点目标。为了说明本文改进算法的性能,这里选择与3.2.1节所述的在方位向通过Stolt插值进行空间位置域聚焦的成像算法[8]作为参考与本文改进算法相比较。图7为两种算法对图6点阵目标的成像结果,对比图7(a)与图7(b)可以明显看出,参考算法各点目标方位聚焦位置关系发生紊乱,使得成像结果无法反映方位几何位置关系,该现象与3.2节分析相一致。与之对应的本文改进Omega-K算法的成像结果则能正确反应A,B,C 3点的方位相互位置关系,需要说明的是,这里B点相对于P点的方位位置偏移是由于成像几何模型引入的形变造成的,可以很容易的通过几何校正进行消除。图7(c)给出了本文算法各点成像结果插值图,从图中可以看出主瓣、旁瓣明显分开,且呈现标准的“十字架”状,说明聚焦效果良好。

表1 雷达系统仿真参数

图6 点目标分布示意图
表2进一步给出了A,B,C 3点未加窗时的成像指标参数,对比可知,本文提出的改进Omega-K算法的成像指标与理论值基本吻合,且在边界点处仍保持良好的聚焦性能,证明了该算法的有效性,而参考算法由于经过“正侧化”处理,具有一定的聚焦能力,但方位位置错位,且严重损失方位分辨率。
为了验证本文算法的加窗性能,选取“正侧化”后处于同一距离单元内的 3个点目标A,B,C进行分析。图8为本文改进算法A,B,C 3点成像结果加窗后的方位脉冲压缩剖面图,各点旁瓣得到了良好的抑制,均处于-30 dB以下,实现了同一距离单元内的方位统一加窗处理抑制旁瓣,证明了本文算法的实用性。
4.2 实测数据处理
为了说明算法的实践应用性能,这里对机载实测数据进行处理。雷达工作于X波段,发射信号带宽为70 MHz,天线波束指向斜视角为50°。图9(a)为使用参考算法成像结果(方位向未补零处理);图9(b)为方位补零点数为 1/2全孔径点数时的成像结果;图 9(c)为方位补零点数为全孔径点数时的成像结果;图 9(d)为本文改进子孔径算法的成像结果。可以看出,对于子孔径数据成像,参考算法在方位向聚焦会出现严重反折,未进行补零处理时,已无法明确分辨出准确的地貌信息;当补零点数为 1/2全孔径点数时,场景方位中心地貌可以进行分辨,而边缘处则表现出明显的反折现象(对比图 9(b),9(c)中椭圆标记区域);当补零点数达到全孔径点数时,方位聚焦位置正常,因此,需要大量的补零操作才能使其反映正确的地理位置,加剧了计算量。本文改进算法结果如图 9(d)所示,方位向聚焦在波数域,无需进行大量的补零操作,并能正确反映方位位置,验证了本文算法的有效性和实用性。
5 结束语
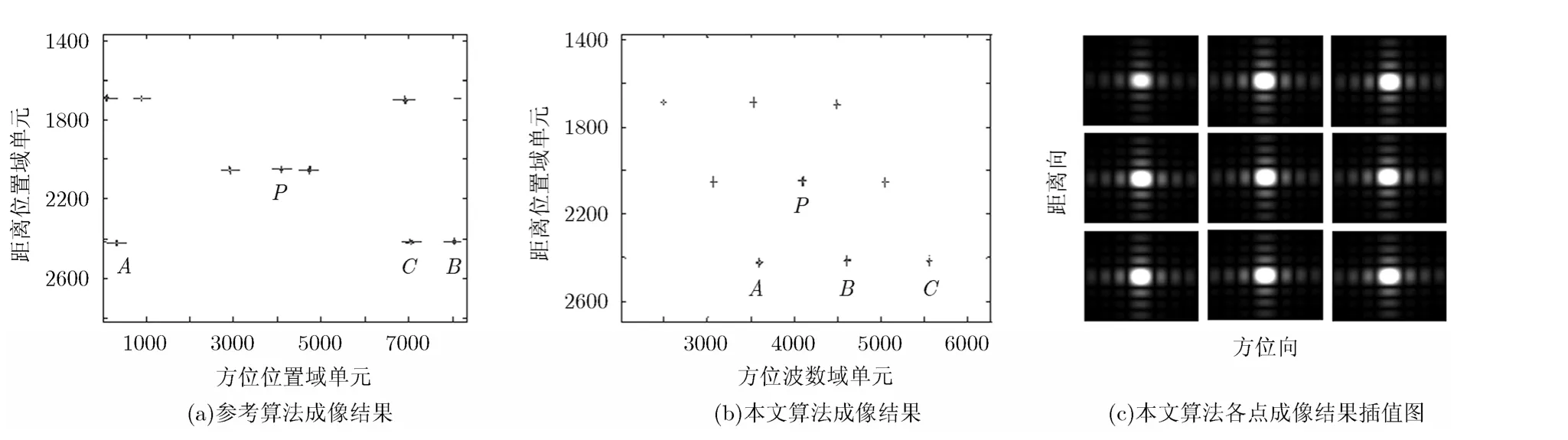
图7 各算法成像结果

性能指标 理论值 A B C A B C本文算法 参考算法峰值旁瓣比(dB) -13.26 -13.23 -13.18 -12.84 -13.16 -13.25 -13.25积分旁瓣比(dB) -9.80 -9.75 -9.76 -9.61 -10.60 -10.64 -10.75分辨率(m) 0.53 0.56 0.58 0.59 1.11 1.16 1.21
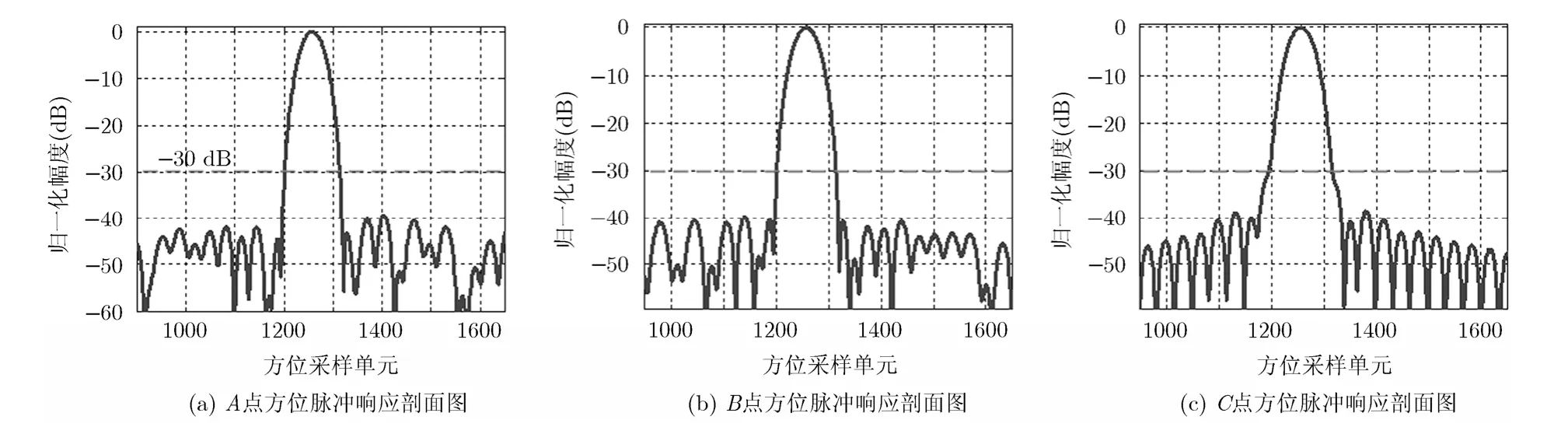
图8 本文改进算法成像结果的方位脉冲压缩剖面图(加窗后)

图9 实测数据处理结果
本文针对斜视条带SAR的子孔径成像,提出了一种基于方位谱重采样的改进Omega-K算法。通过表2 成像算法性能指标对比(方位向)将斜视波数谱乘以校正函数,并进行方位向重采样消除多普勒参数的空变性,使波数谱支撑区“正侧化”,这样简化了传统斜视2维波数谱的表达式,并扩大了支撑区的可用面积,改善成像质量。同时,考虑到子孔径数据的特殊性,改进原Omega-K算法的2维空间域成像方法,通过扩展插值将方位向与距离向解耦合,最后实现距离向空间位置域聚焦,方位向波数域聚焦的成像方法,并且能够对子孔径数据在方位位置域进行统一加窗处理。点目标回波数据的仿真结果及实测数据处理验证了本文算法的有效性和实用性。
[1] 姚迪, 刘峰, 龙腾. 机载合成孔径雷达子孔径实时处理方法研究[J]. 现代雷达, 2006, 28(10): 53-55.Yao Di, Liu Feng, and Long Teng. Study on airborne SAR subaperture real-time processing method[J]. Modern Radar,2006, 28(10): 53-55.
[2] Tang Yu, Zhang bo, Xing Meng-dao, et al.. Azimuth overlapped subaperture algorithm in frequency domain for highly squinted synthetic aperture radar[J]. IEEE Geoscience and Remote Sensing Letters, 2013, 10(4): 692-696.
[3] Sun Yi, Jing Xiao-jun, Sun Song-lin, et al.. The subaperture secondary range compression algorithm for near space squint SAR[C]. 2013 IEEE International Symposium on Signal Processing and Information Technology, Athens, Greece,2013: 338-343.
[4] Yeo Tat-soon, Tan Ngee-leng, Zhang Cheng-bo, et al.. A new subaperture approach to high squint SAR processing[J].IEEE Transactions on Geoscience and Remote Sensing, 2001,39(5): 954-968.
[5] 保铮, 邢孟道, 王彤. 雷达成像技术[M]. 北京: 电子工业出版社, 2010: 173-177.
[6] Bamler R. A comparison of range-Doppler and wavenumber domain SAR focusing algorithms[J]. IEEE Transactions on Geoscience and Remote Sensing, 1992, 30(4): 706-713.
[7] Cumming I G and Wong F H. Digital Processing of Synthetic Aperture Radar Data: Algorithm and Implementation[M].Norwood, MA: Artech House, 2005: 219-244.
[8] Zhang Lei, Sheng Jia-lian, Xing Meng-dao, et al..Wavenumber-domain autofocusing for highly squinted UAV SAR imagery[J]. IEEE Sensors Journal, 2012, 12(5):1574-1588.
[9] Xiong Tao, Xing Meng-dao, Xia Xiang-gen, et al.. New applications of Omega-K algorithm for SAR data processing using effective wavelength at high squint[J]. IEEE Transactions on Geoscience and Remote Sensing, 2013, 51(5):3156-3169.
[10] An Dao-xiang, Huang Xiao-tao, Jin Tian, et al.. Extended two-step focusing approach for squinted spotlight SAR imaging[J]. IEEE Transactions on Geoscience and Remote Sensing, 2012, 50(7): 2889-2900.
[11] 肖忠源, 徐华平, 李春生. 弹载斜视 SAR 成像的改进波数域算法[J]. 电子与信息学报, 2011, 33(6): 1453-1458.Xiao Zhong-yuan, Xu Hua-ping, and Li Chun-sheng. A modified wave-number domain algorithm for missile-borne squinted SAR data processing[J]. Journal of Electronics &Information Technology, 2011, 33(6): 1453-1458.
[12] 杨军, 孙光才, 吴玉峰, 等. 基于方位谱分析的斜视 TOPS SAR 子孔径成像方法[J]. 电子与信息学报, 2014, 36(4):923-930.Yang Jun, Sun Guang-cai, Wu Yu-feng, et al.. A subaperture imaging algorithm for squint TOPS SAR based on SPECAN technique[J]. Journal of Electronics & Information Technology, 2014, 36(4): 923-930.
[13] Carrara W C, Goodman R, Majewski R, et al.. Spotlight Synthetic Aperture Radar: Signal Processing Algorithms[M].Boston: Artech House, 1995: 192-200.
[14] 肖忠源, 徐华平, 李春生. 基于俯冲模型的频域距离走动校正NLCS-SAR 成像算法[J]. 电子与信息学报, 2013, 35(5):1090-1096.Xiao Zhong-yuan, Xu Hua-ping, and Li Chun-sheng. NLCSSAR imaging algorithm with range-walk correction in frequency domain based on dive model[J]. Journal of Electronics & Information Technology, 2013, 35(5):1090-1096.
[15] Zhang Shuang-xi, Xing Meng-dao, Xia Xiang-gen, et al..Focus improvement of high-Squint SAR based on azimuth dependence of quadratic range cell migration correction[J].IEEE Geoscience Remote Sensing Letters, 2013, 10(1):150-154.