一种新的基于瞬时干涉的SAR-GMTI精聚焦和定位方法
2015-12-13孙光才李学仕邢孟道
张 升 孙光才 李学仕 邢孟道
1 引言
地面运动目标检测(Ground Moving Target Indication, GMTI)是现代雷达要完成的基本功能之一,随着合成孔径雷达(Synthetic Aperture Radar,SAR)的广泛应用,基于SAR平台的运动目标识别与定位无论在军事上还是在民用上都有着广泛的应用[1]。在单通道SAR-GMTI情况下,回波中大量的强杂波使得淹没在其中的动目标难以检测[2],所以单通道SAR-GMTI系统对信噪比要求较高[3]。多通道SAR-GMTI系统能够有效地抑制或者消除杂波,保留动目标信息[4],并为动目标的测速定位提供更多自由度[5]。多通道动目标的精确测速定位需要对动目标进行聚焦成像以提高动目标信号信噪比,针对成像过程中动目标径向运动造成的距离徙动问题,在现有的SAR-GMTI处理中主要是通过Keystone变换解决[6],而方位散焦问题主要是通过估计动目标信号方位调频率来解决,如文献[7]中的时频分析方法和文献[8]中的分数阶傅里叶变换方法。
Keystone变换方法能够在动目标运动参数未知的条件下实现动目标的线性距离走动校正,但是不能校正二次距离弯曲[9],而且它只针对没有径向速度模糊的情况[10]。时频分析等方法在理想情况下能够取得较高的方位调频率估计精度,但是当动目标信号信噪比降低或有信号干扰时,其估计精度会严重下降[11],而且动目标方位速度是时变的,仅仅补偿动目标方位速度引起的二次调频项不足以实现动目标的完全聚焦[12]。
为了实现动目标精聚焦,以提高动目标定位精度,本文以机载三通道SAR-GMTI为研究提出了一种新的基于瞬时干涉的 SAR-GMTI精聚焦和定位方法,该方法通过动目标瞬时干涉相位的精提取可以有效补偿动目标距离徙动,并最终实现了动目标的精聚焦和精确定位。本文具体内容安排如下:第2节介绍了机载三通道SAR-GMTI信号模型;第3节给出了动目标粗聚焦及检测方法;第4节进行了针对动目标精聚焦和准确定位的具体研究;第5节给出了实测数据的处理结果;第6节对本文进行了总结。
2 信号模型
机载三通道 SAR-GMTI与动目标几何关系模型如图1所示,载机飞行速度为v,Rb为载机到动目标的最近距离,X轴表示横向位置坐标轴,R ( ta)为载机到动目标的瞬时斜距,三通道天线等效相位中心位置分别为 d1, d2, d3,在实际中可以让天线均匀排列,即 d1=-d , d2= 0 ,d3= d ,其中d为天线间距,下面的推导和分析都是基于天线均匀排列的配置(天线非均匀排列的配置下,本文结论也是成立的)。动目标径向和横向瞬时速度分别为 vr( ta), va( ta) ,其中 ta为方位慢时间,在雷达信号处理中一般横向表示载机飞行方向,径向表示垂直载机飞行的方向。根据上述模型,通道i的接收信号经距离脉冲压缩后可以表示为

其中
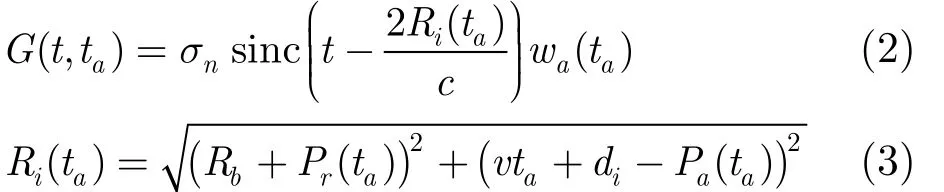
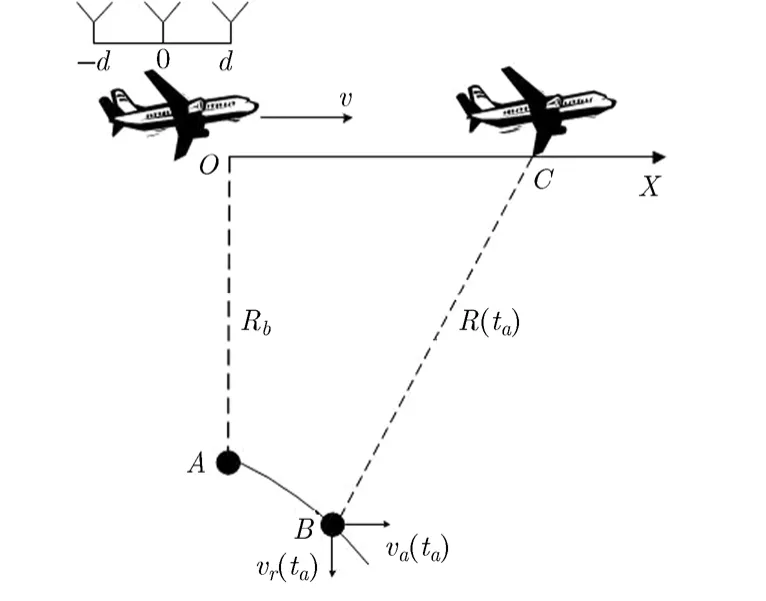
图1 三通道SAR-GMTI几何模型
式中nσ为动目标后向散射系数,λ为信号波长,t为距离快时间, wa(⋅) 为方位窗函数, Pr( ta), Pa( ta) 分别为动目标在径向和横向的瞬时运动距离。
3 动目标粗聚焦与检测
多通道SAR-GMTI处理需要进行通道均衡,然后根据相位中心偏置天线(DPCA)原理进行通道时移配准,补偿等效天线相位中心距离引起的时延差异,并两两通道对消抑制场景杂波,使得对消通道中只留下动目标信号[13]。根据式(1)和式(3),通道对消后的两路动目标信号表示为
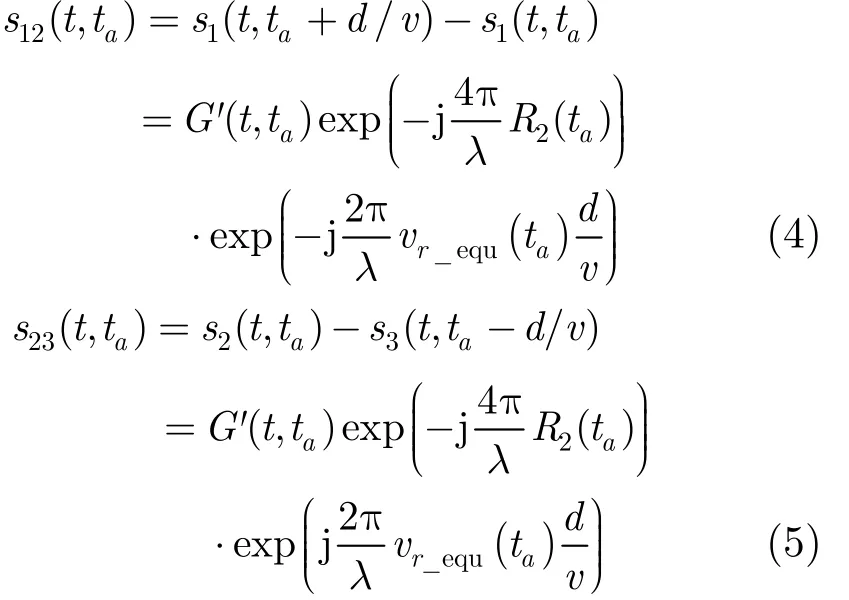
其中
对消后的动目标信号需要进行聚焦处理,以提高动目标信号的信噪比,利于动目标检测。本文采用方位Deramp处理对动目标信号进行粗聚焦[14]。由于动目标方位速度造成的散焦影响,粗聚焦对信噪比的提升有限,为了提升动目标检测性能,本文的动目标检测可以利用文献[15]中基于幅度和相位的联合检测方法。常规恒虚警(CFAR)检测方法[16]只是依靠幅度门限检测,容易造成强杂波的虚警检测和信噪比较低动目标的漏警检测。文献[15]中方法针对散焦严重、信噪比较低的动目标,通过较低的幅度检测门限可以检测,减小了漏警率,同时,针对降低幅度门限后引入的强杂波,通过干涉相位检测门限可以将其排除,减小了虚警率,这样就有效提高了动目标检测性能。
4 动目标精聚焦和精确定位
动目标通过方位 Deramp处理并检测出来以后,以此时的聚焦程度进行成像位置确定和干涉相位提取并不能满足精确定位的要求,所以本文需要对动目标进行精聚焦处理,首先就需要解决动目标径向运动造成的距离徙动问题。通过研究发现,动目标等效瞬时径向速度与两路动目标信号之间的瞬时干涉相位是成线性关系的,而动目标距离徙动又可以表示为动目标等效瞬时径向速度在方位时间上的积分,所以通过提取动目标瞬时干涉相位可以对动目标距离徙动进行补偿。通过对检测出的动目标进行加窗提取就可以得到单个动目标信号,再将其变换到方位时域,并作方位Ramp处理,还原方位Deramp操作补偿掉的相位,将动目标信号恢复到式(4)和式(5)所示的原始形式。此时对式(4)和式(5)中两路动目标信号作干涉处理,可以得到动目标信号的瞬时干涉相位 φ ( ta) :

其中angle(⋅)表示取相角操作,从式(8)可以看到,动目标信号瞬时干涉相位与动目标等效瞬时径向速度成线性关系,沿方位时间对 vr_equ(ta)进行积分可以得到

式中, R2(ta)即为动目标斜距历程,包含距离徙动量。所以利用动目标瞬时干涉相位计算得到动目标等效瞬时径向速度,并沿方位时间进行积分就可以构造动目标徙动补偿函数对动目标进行徙动补偿。
4.1 径向速度解模糊
通过对两路动目标信号进行干涉处理和相位提取可以得到动目标的瞬时干涉相位,但是提取的相位可能缠绕,从而使得径向速度产生模糊。多通道SAR系统中,存在两种径向速度模糊:脉冲重复频率(Pulse Repetition Frequency, PRF)模糊和干涉相位模糊,下面通过分析动目标径向速度模糊给出一种基于距离包络走动校正的解模糊方法。
(1)径向速度模糊分析 动目标DPCA处理中,两通道信号在时移配准后对消,此时因为动目标径向速度的存在,对消后的动目标信号就会包含干涉相位项,即式(4)和式(5)中的最后一个指数项,但是由于相位以2π为周期缠绕,动目标径向速度会以PRF模糊速度进行卷折,其中PRF模糊速度可以表示为:vprf= P RF × λ /2。干涉处理后得到的干涉相位同样可能2π跳变,那么实际得到的干涉相位φ︿可以表示为φ︿ =φ+N ×2π ,其中N=…-2,-1,0,1,…为干涉相位模糊数。所以动目标真实径向速度与实际得到的干涉相位关系为

其中, M =…-2,-1,0,1,…为PRF模糊数。
(2)径向速度解模糊 动目标径向速度体现在干涉相位中会因为相位缠绕而发生改变,但是它体现在动目标信号包络上并引起距离走动时却不会改变,所以我们可以通过搜索PRF模糊数和干涉相位模糊数的方法构造走动校正函数,并对动目标进行走动校正,然后根据动目标包络是否校直来确定径向速度的PRF模糊数和相位模糊数。具体的解模糊流程图如图2所示。而判断包络是否被校直的方法是通过比较走动校正后的动目标信号在方位上的积累能量,很显然,当动目标信号包络被校直,信号能量集中在一个距离单元上时,它沿方位向的能量积累最大;当包络未被校直,信号能量分散到多个距离单元上时,其沿方位向的能量积累必然减弱。
4.2 瞬时干涉相位精提取
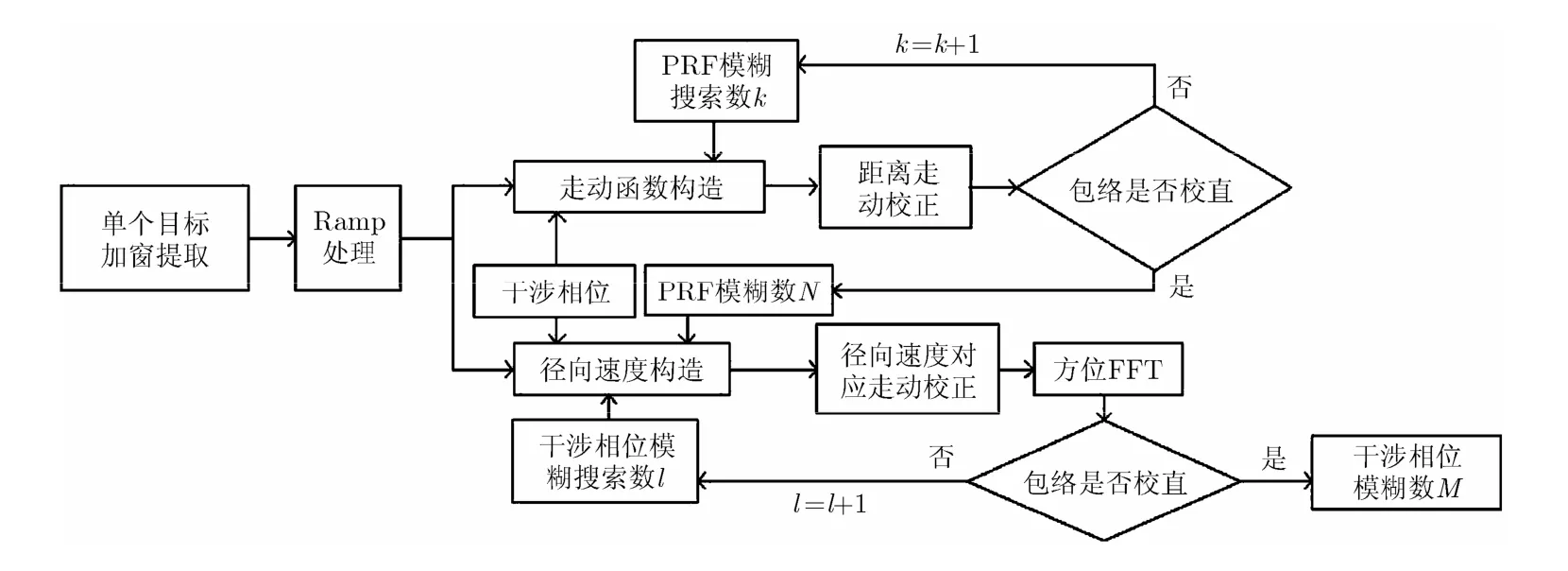
图2 径向速度解模糊流程图
确定PRF模糊数和干涉相位模糊数,并通过式(8)的干涉处理可以得到动目标瞬时干涉相位,然后根据式(10)中的动目标径向速度与干涉相位以及模糊数之间的关系得到动目标等效瞬时径向速度,进而对动目标进行距离徙动校正。但是在距离徙动校正之前,动目标信号分散到很多距离单元上,直接进行干涉处理需要对动目标信号进行距离向的叠加,这样会混入大量的杂波和噪声,得到的瞬时干涉相位曲线会有跳变和毛刺,影响瞬时干涉相位测量精度。针对这一情况,本文给出一种基于聚焦提取的迭代方法来提高瞬时干涉相位精度,这一方法主要由以下步骤完成:
步骤 1 初次干涉相位提取 经 Deramp处理后动目标粗聚焦,加窗提取后选取能量较大的几个点作干涉处理并叠加,然后提取叠加后的干涉相位φ0。
步骤2 动目标频域聚焦加窗提取 由φ0及径向速度 PRF模糊数和干涉相位模糊数可以得到等效瞬时径向速度在合成孔径时间内非时变分量vr_ave。以 vr_ave构造走动校正函数对两路动目标信号进行走动校正,走动校正后直接提取一路动目标信号所在距离单元的方位相位,并同时对两路动目标信号进行方位时域相位补偿,然后将动目标信号变换到方位频域,可以将两路动目标信号聚焦在方位零频处。动目标在方位零频处聚焦后,通过2维加窗提取可以滤除杂波和噪声的干扰。
步骤 3 再次干涉相位提取 将加窗提取滤波后的两路动目标信号再变回到方位时域,并还原补偿的方位时域相位。此时的动目标信号不仅走动得到校正,并且滤除了杂波和噪声干扰后信噪比大大提高,再来进行瞬时干涉处理就可以得到精确的动目标瞬时干涉相位曲线。
步骤 4 迭代处理 若步骤 3中得到的瞬时干涉相位精度仍不够理想,可以将其代入到步骤1中替换0φ,然后重复后面的步骤,并缩小窗大小滤除更多干扰,如此循环迭代可以逐步提高瞬时干涉相位精度。
4.3 动目标精聚焦
通过上述方法得到动目标精确的瞬时干涉相位,并结合搜索得到的PRF模糊数和干涉相位模糊数,通过式(10)可以得到准确的动目标等效瞬时径向速度 vr_equ(ta)。利用动目标等效瞬时径向速度可以完成动目标信号的距离徙动校正,并最终实现动目标精聚焦。

补偿。经距离徙动校正和干涉相位补偿后的两路动目标信号形式相同,都为s( fr,ta)

从式(11)可以看到,动目标径向运动造成的距离徙动和方位偏移影响已经完全移除。

(2)方位高次相位补偿 动目标距离徙动校正后,径向运动影响已经完全消除,动目标精聚焦处理需要补偿方位运动造成的散焦影响。将式(11)变换到距离时域并可以分解得到其中,G'(t) 为G'(fr) 距离时域表示, φazi( ta) 正是需要补偿的方位运动造成的高次相位项。首先本文对(12)作方位 Deramp处理可以将载机运动对应的二次调频项从方位相位中移除,忽略常数项后可以得到

式(13)中第 1个指数项是方位时间的线性项,包含了动目标的位置信息,第2项即为需要补偿的方位高次相位项。经过距离徙动校正后的动目标信号是包络对齐的,可以直接提取所在距离单元的方位相位,对提取的方位相位曲线进行多项式拟合可以分离出线性项,利用去除线性项后的剩余高次相位项对动目标信号进行方位高次相位补偿,补偿后对动目标信号进行Ramp处理,还原方位Deramp操作补偿掉的二次调频项,动目标信号就可以表示为

此时,方位运动造成的散焦影响也被移除,动目标信号形式与静止目标形式相同,利用常规的SAR 成像算法,比如距离多普勒(Range Doppler,RD),调频变标(Chirp Scaling, CS)算法,就可以对动目标进行聚焦处理,实现动目标的精聚焦。
4.4 动目标精确定位
完成动目标精聚焦后,由于在补偿距离徙动的同时也补偿了方位位置偏移,那么动目标最后的聚焦位置就是动目标的定位位置[17],其中本文假设通过精提取的瞬时干涉相位是非常精确的,完全补偿了动目标方位位置偏移。但是若式(11)中的瞬时干涉相位存在误差,会造成两路动目标信号在距离徙动校正后仍然剩余了线性走动项,并等效为动目标方位位置偏移补偿的误差项。而且在瞬时干涉相位补偿后,两路信号中都存在瞬时干涉相位补偿的误差项。两路动目标信号在精聚焦后可以写为
利用瞬时干涉的动目标精聚焦和定位方法流程图如图3所示。
5 实测数据处理结果
本文中所使用的实测数据为某所录取的机载条带正侧视三通道 SAR-GMTI数据,雷达工作在 X波段,采用全孔径发射三天线同时接受模式,具体工作参数如表 1所示。选取包含高速公路的场景1回波进行处理,经通道均衡对消后得到的动目标方位频谱如图4(a)所示,通过方位Deramp处理对其进行方位粗聚焦后的聚焦结果如图 4(b)所示,其中由矩形框出的为粗聚焦后检测检测到的 8个动目标。
表1 实测数据主要参数
选取动目标T2,利用聚焦迭代方法精提取的瞬时干涉相位结果如图4(d)所示,图4(c)为直接提取的瞬时干涉相位结果,精提取后的干涉相位没有毛刺和跳变,更加平滑,精度明显提高。利用精提取的瞬时干涉相位和搜索的模糊数对 T2进行距离徙动校正,校正后的信号包络如图 4(e)所示,此时径向运动造成的距离徙动被移除,信号包络被校直。图 4(f)所示为距离徙动校正后在动目标所在距离单元提取的方位相位,图 4(g)所示为通过相位曲线拟合去除线性项后剩余的方位高次相位,即为动目标聚焦需要补偿的方位高次相位。图 4(h)为补偿方位高次相位后,利用RD算法得到的T2的精聚焦结果,对比图 4(b)中T2方位Deramp后的粗聚焦结果,此时 T2在距离向和方位向上的聚焦效果都有了明显的提升。
最后,对8个动目标全部处理。利用常规定位方法和本文方法得到的动目标定位结果如图5所示(其中黑色箭头尖端所指小矩形代表动目标的定位位置),可以看出,本文方法定位精度整体有所提高,而且由于很好地解决了动目标径向速度模糊问题,本文定位方法稳健性更好。选取另一块场景2利用本文方法进行处理得到的定位结果如图6所示(其中白色箭头尖端所指小矩形代表动目标的定位位置),从图中可以看到,场景中高速公路上的大部分动目标都取得了准确的定位结果,而对于没有定位到高速公路上的动目标,经选取后分析,主要是因为在粗聚焦后,位置和速度都很接近的目标没有分离开,在提取后相互影响,造成了定位的不准确。当然,也有一些动目标经本文方法正确处理而没有定位在高速公路上,这不能说明是本文方法定位的不准确,其可能是在场景中的小路上,工程应用上对于少量动目标的定位不准确是允许的。
图3 利用瞬时干涉的动目标精聚焦和定位方法流程图
图5 场景1定位结果
6 结束语
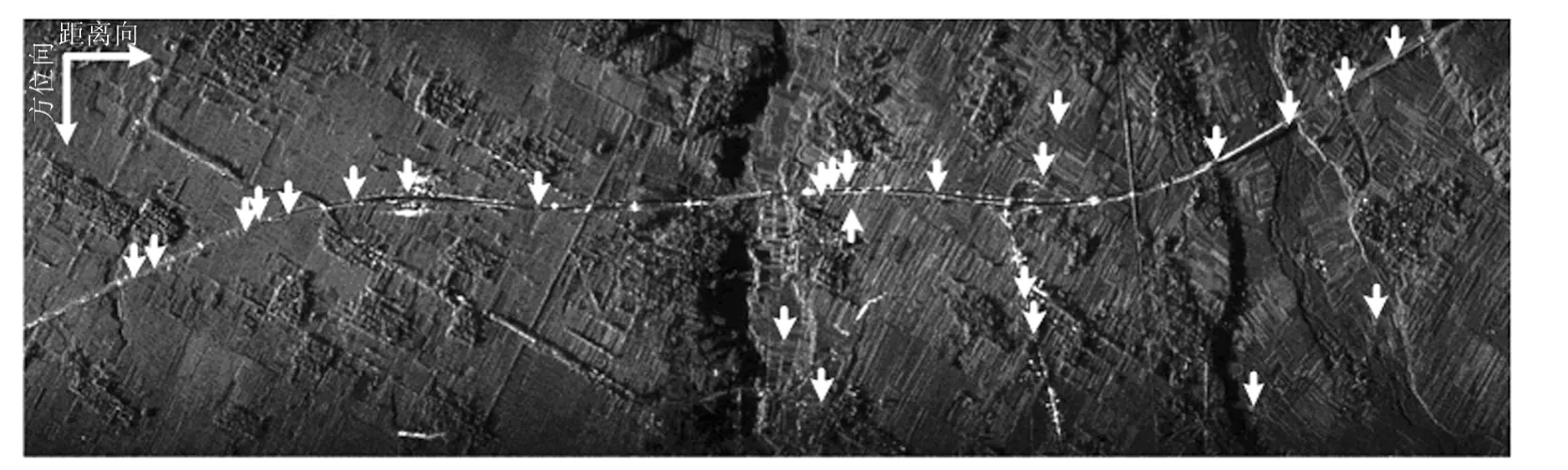
图 6 场景2定位结果
本文研究了SAR-GMTI中动目标高精度聚焦和定位方法。通过精提取动目标瞬时干涉相位并解径向速度模糊,获取动目标等效瞬时径向速度,对动目标距离徙动进行了有效补偿;通过补偿方位项高次相位完成动目标高精度聚焦后,提取动目标干涉相位补偿动目标聚焦位置偏移,实现了动目标的精确定位。实测数据处理结果说明本方法能够有效提升动目标聚焦效果并提高动目标定位精度。本文方法对慢速或快速都是有效的,但是本文方法是基于动目标粗聚焦后的单个提取,需要杂波对消以及方位粗聚焦后的动目标信噪比满足检测要求。所以对于方位粗聚焦后能够有效检测的动目标处理,本文方法都是适用的。
[1] Charles E L and Alan A T. The moving object detection experiment on RADARSAT-2[J]. Canadian Journal of Remote Sensing, 2004, 20(3): 355-368.
[2] Kirscht M. Detection and imaging of arbitrarily moving targets with single-channel SAR[J]. IEE Proceedings- Radar,Sonar and Navigation, 2003, 150(1): 7-11.
[3] Ouchi K. On the multilook images of moving targets by synthetic aperture radars[J]. IEEE Transactions on Antennas and Propagation, 1985, 33(8): 823-827.
[4] Maori D C and Sikaneta I. A generalization of DPCA processing for multichannel SAR/GMTI radars[J]. IEEE Transactions on Geoscience and Remote Sensing, 2013, 51(1):560-572.
[5] Zhu S Q, Liao G S, Qu Y, et al.. Performance improvement for monostatic clutter rejection using space-time-range three-dimensional processing[J]. Digital Signal Processing,2011, 21(2): 248-261.
[6] 钱江, 苏军海, 李凉海, 等. 利用KWT 进行动目标成像的三通道SAR-GMTI 快速目标运动参数估计[J]. 电子与信息学报,2010, 32(7): 1661-1667.Qian Jiang, Su Jun-hai, Li Liang-hai, et al.. Tri-channel SAR-GMTI high-speed target imaging and motion parameter estimation using KWT[J]. Journal of Electronics &Information Technology, 2010, 32(7): 1661-1667.
[7] 吕孝雷. 机载多通道SAR-GMTI处理方法的研究[D]. [博士论文], 西安电子科技大学, 2008.Lü Xiao-lei. Study on new methods for airborne multichannel SAR-GMTI processing[D]. [Ph.D. dissertation], Xidian University, 2008.
[8] Yang Jian, Liu Chang, and Wang Yan-fei. Detection and imaging of ground moving targets with real SAR data[J].IEEE Transactions on Geoscience and Remote Sensing, 2015,53(2): 920-932.
[9] Li Gang, Xia Xiang-gen, and Peng Ying-ning. Doppler keystone transform: an approach suitable for parallel implementation of SAR moving target imaging[J]. IEEE Geoscience and Remote Sensing Letters, 2008, 5(4): 573-577.
[10] 钱江. SAR-GMTI处理方法研究[D]. [博士论文], 西安电子科技大学, 2011.Qian Jiang. Study on methods for SAR-GMTI[D]. [Ph.D.dissertation], Xidian University, 2001.
[11] 杨垒. 多通道SAR-GMTI方法研究[D]. [博士论文], 西安电子科技大学, 2009.Yang Lei. Study of GMTI methods for multichannel SARGMTI system[D]. [Ph.D. dissertation], Xidian University,2009.
[12] Zhu Sheng-qi, Liao Gui-sheng, Tao Hai-hong, et al..Estimating ambiguity-free motion parameters of ground moving targets from dual-channel SAR sensors[J]. Journal of Selected Tops in Applied Earth Observation and Remote Sensing, 2014, 7(8): 3328-3349.
[13] 王肖洋, 高贵, 周石琳, 等. 一种基于双通道DPCA的SARGMTI杂波抑制方法[J]. 雷达学报, 2014, 3(2): 242-248.Wang Xiao-yang, Gao Gui, Zhou Shi-lin, et al.. A clutter suppression approach for SAR-GMTI based on dual-channel DPCA[J]. Journal of Radars, 2014, 3(2): 242-248.
[14] Sun Guang-cai, Xing Meng-dao, Xia Xiang-gen, et al..Robust ground moving-target imaging using derampkeystone processing[J]. IEEE Transactions on Geoscience and Remote Sensing, 2013, 51(2): 966-982.
[15] 吕孝雷, 邢孟道, 潘月娥, 等. 基于联合像素干涉统计特性的三通道动目标检测方法[J]. 电子学报, 2008, 36(12):2319-2323.Lü Xiao-lei, Xing Meng-dao, Pan Yue-e, et al.. Detection of three-channel ground moving targets using statistical properties of joint pixel pairs interferograms[J]. Acta Electronica Sinica, 2008, 36(12): 2319-2323.
[16] 魏中平. 基于CFAR 的SAR目标检测[J]. 电子科技, 2013,26(3): 26-29.Wei Zhong-ping. Detection of SAR target based on CFAR[J].Electronic Science & Technology, 2013, 26(3): 26-29.
[17] Zhang Xue-pan, Liao Gui-sheng, Zhu Sheng-qi, et al..Geometry-information-aided efficient motion parameter estimation for moving-target imaging and location[J]. IEEE Geoscience and Remote Sensing Letters, 2015, 12(1):155-159.