基于倒频谱和局部灰度梯度算子的阴影检测方法
2015-12-12郑颖,肖宿,周影
郑 颖,肖 宿,周 影
(淮北师范大学 计算机科学与技术学院,安徽 淮北 235000)
基于倒频谱和局部灰度梯度算子的阴影检测方法
郑 颖,肖 宿,周 影
(淮北师范大学 计算机科学与技术学院,安徽 淮北 235000)
为解决传统智能交通系统中由于阴影检测算法的精确性导致错误提取交通参数的问题,提出一种基于倒频谱和局部灰度梯度算子的阴影检测方法.首先判断阴影的存在性,接着利用Lab颜色空间L通道的倒频谱分析方法确定候选阴影区域块,最后利用局部灰度梯度算子的纹理特性获得精确的阴影区域.实验表明,该方法阴影检测的有效率在85.3%以上,且能很好地满足实时场景要求,为后续交通参数的提取工作奠定了良好的基础.
倒频谱;局部灰度梯度;方向余弦
0 引言
运动目标的检测技术是视频监控中的一个主要内容,精确的目标检测有利于后续的跟踪和识别.由于光线的遮挡,阴影往往伴随运动目标被检测出来,在一些环境中可能会产生一些有用的信息,比如运动目标相对光源的位置,但是也会带来一些导致目标分割、目标识别及目标计数错误的问题.
一般来说,阴影分为两类,一类是由于目标未被光线直射形成的自身阴影,另一类是由于目标遮挡光线造成的投射阴影,自身阴影作为运动目标的一部分对检测影响不大,而投射阴影是影响运动目标检测精确性的主要因素.因此本文主要研究投射阴影的检测去除问题.
文献[1]使用颜色空间HSV中的饱和度和亮度分量在阴影区域与背景区域的不同来检测及消除阴影,时间复杂度比较小,但只适用于浅色运动目标阴影的检测与去除.文献[2]利用RGB颜色空间的亮度失真来检测阴影,用线性变换拟合阴影区域和背景区域的颜色改变情况,采用贝叶斯概率来区分目标和阴影,这种算法也是基于阴影不会改变背景区域颜色信息的假设,难以在实时系统中应用.由于阴影所覆盖的区域和对应的背景区域的纹理信息不随光照而改变,文献[3]利用Gabor函数分解系数描述纹理,此方法运算量大,需几百毫秒,不能满足实时要求.文献[4]考虑阴影区域和对应的背景区域的线性关系,使用归一化互相关函数检测与去除阴影,此方法对于边缘检测效果不佳.
为解决深颜色车辆的阴影去除并降低运算量,本文提出一种基于倒频谱分析和局部梯度算子的阴影检测方法.首先通过算法判断阴影是否存在,为下一步是否使用阴影检测方法做出判断.其次基于区域块的Lab颜色空间L通道的倒频谱特性确定候选阴影块,最后对候选阴影块的每一个像素利用局部梯度算子纹理特性获得阴影区域和背景区域的优化分割.
1 阴影检测与去除
1.1 阴影存在性判断
利用所存储的每一帧图像的拍摄时间及视频帧的录制时间可以判断是否晚上或雨天,若是则排除阴
影存在的可能性,否则我们利用亮度估计算法[5]来判断阴影存在与否.
为了节约时间使用前景图像代替整幅图像,前景图像可根据背景差分获得.在阴影存在性判断算法中使用两个准则:能量值E(Eb,Ed分别表示亮像素和暗像素的能量值)和暗像素区域的相对大小Pd.当场景清晰可见的时候被认为是高亮度,比如阳光灿烂.换种说法,当运动目标很难被识别时认为低亮度,比如晚上或雨天、雾天.由于目标常常比阴影亮度高,使用能量值E表示目标可见度及场景亮度水平.因此,Eb越大,阴影存在可能性越大.
基于图像亮度信息,我们把像素分为两类,分别为暗像素和亮像素,如果RGB颜色空间的三个通道的亮度值均大于对应的背景区域像素值,那么该像素被认为是亮像素,否则为暗像素.Sb,Sd分别表示亮像素和暗像素的集合,
定义能量值为:
其中,nj表示Sj集合中的像素数目,ei是像素的能量值.定义为:
其中Ii,Ij,Ni和n分别表示亮度值,邻域亮度值,邻域值和邻域内总像素数.另外一个准则使用图像中暗像素数和亮像素数的比值Pd.
其中,nb,nd分别表示前景区域亮暗像素数.通过分析,Eb的值小表示亮度低,Pd的值小表示场景中阴影区域小.因此,当Eb很小时表示无阴影,即使Eb值比较大,也不能断定存在阴影,但是当Eb和Pd的值同时比较大时,认定存在阴影,否则不存在阴影.
1.2 区域级阴影去除
阴影并不改变原始背景区域的纹理分布.目前所采集的图像大多数都是基于RGB颜色空间的,但是RGB颜色空间各个分量间计算量大、相关性高、冗余信息较多.由于Lab颜色空间到RGB颜色空间的转换是线性的,且Lab颜色空间中亮度分量L和a通道(绿色到红色的色相),b通道(蓝色到黄色的色相)是相互独立的,本文选择在Lab颜色空间的L通道上结合倒频谱来获得候选阴影区域块.
倒频谱,就是对功率谱的对数值进行傅立叶逆变换,将复杂的卷积关系变为简单的线性叠加,从而在其倒频谱上可以较容易地识别信号的频率组成分量,便于提取所关心的频率成分,同时具有较高的抗噪比和抗旋转特性.
把信号x的倒频谱定义为:

其中,F{⋅}表示离散傅里叶变换,|⋅|表示幅度,ln表示自然对数,F-1{⋅}表示离散傅里叶逆变换.
考虑算法的精度和增加阴影像素的识别率,把前景图像划分成N*N的子块,块的大小影响算法的精度和识别率.综合实验得出,把前景划分成N=8的子块是最优的.把前景区域在Lab空间的L通道上划分成若干个8*8的像素块,第i个8*8的块定义成,对应的背景像素块为
则第i块的倒频谱为:
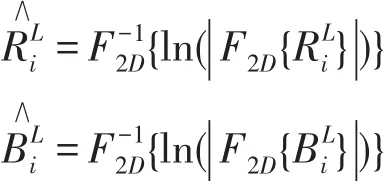
其中F2D{⋅}为二维离散傅里叶变换,为二维离散傅里叶逆变换.
阴影是运动目标在背景区域上投射的影子,只会降低其整体亮度信息,不会改变其纹理信息.若该块为阴影块,则应具备性质:
其中∂为小于1的正实数,差分矩阵的性质应该为一个变比矩阵,仅(1,1)索引位置有值,其余均为0,定义距离

因此候选阴影块的决策方法为:
1.3 像素级精确阴影去除
阴影保留背景的纹理特征,而目标较大程度地改变背景的纹理特征.经研究发现,局部灰度梯度可以很好地描述纹理信息,因此通过分析比较侯选阴影块和对应背景区域的梯度可以检测出精确的阴影区域.
本文使用改进的方向梯度作为纹理特征来检测阴影像素点.使用的方向梯度算子为4个方向r的Sobel算子.使用的方向梯度算子如图1所示.
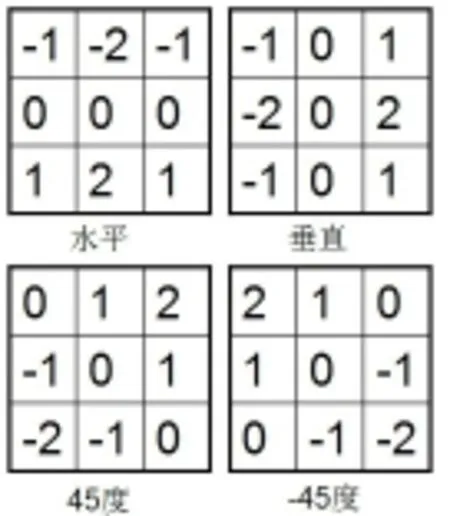
图1 方向梯度算子
实现步骤为:
(1)对于候选阴影块的每一个像素,从水平、垂直、对角和负对角4个方向求梯度,计算每个像素的梯度

(2)计算对应背景点的4个方向梯度,表示成向量:

(3)引入夹角余弦来度量纹理的差异.
H的取值为[-1,1],夹角余弦越大表示阴影区域和背景纹理相似度越高,夹角余弦越小表示阴影区域和背景纹理相似度越低,取一定的阈值即可获得阴影区域.
2 实验结果分析
本实验使用matlab进行仿真实验 ,所用PC机配置为Intel Core I5处理器,2 GB内存,实验视频为Highway I,Highway II,和作者自拍的视频,采用文献[6]中提出的阴影识别率ε和阴影检测率η对该算法的性能进行评估,定义如下:
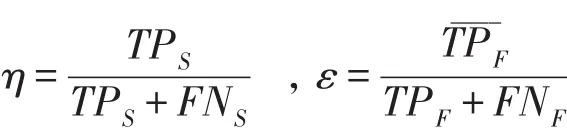
其中,下标S表示阴影像素点,下标F表示前景像素点,TPS表示检测出的正确阴影像素点的数量,FNS表示错误检测阴影像素点的数量,TPF表示被错误检测为阴影像素点的数量和被检测为背景像素点数量的差值,FNF表示被错误检测为阴影像素点的前景像素点数量.表1给出本文提出的算法和其它算法在标准测试集[6]上的比较.
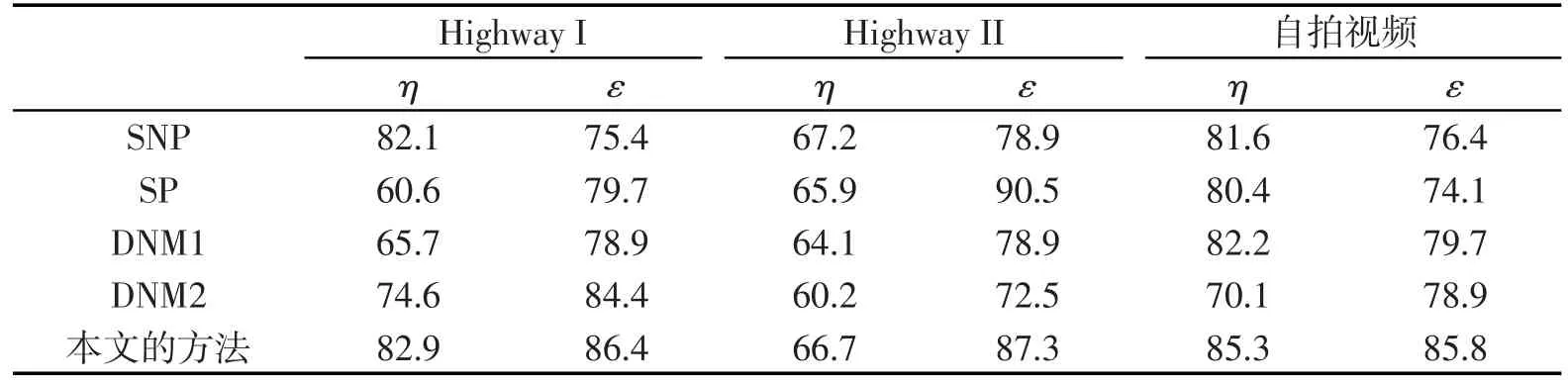
表1 经典实验结果对比 %
为了定性的评价算法效果,本文选取了2段经典高速视频和1段作者自拍的视频进行分析,如图2-4所示.实验表明,本文所提出的阴影检测与去除方法能够准确的检测阴影区域,精确分割出运动目标.为后续的跟踪与识别打下良好的基础.
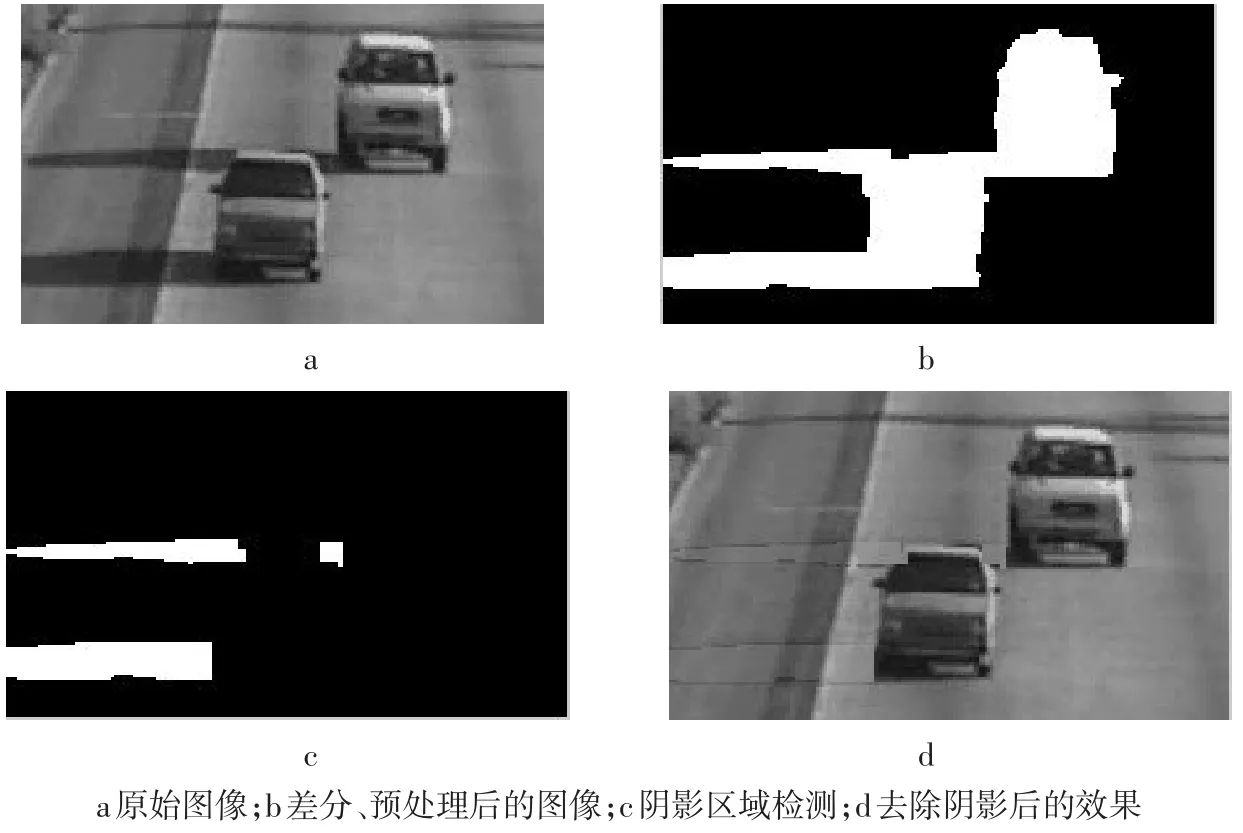
图2 存在遮挡的情况
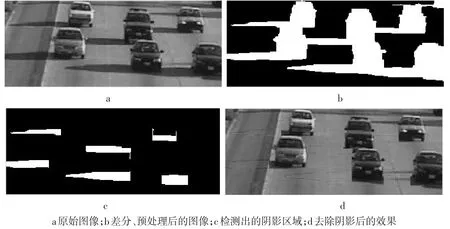
图3 多个车辆阴影情况
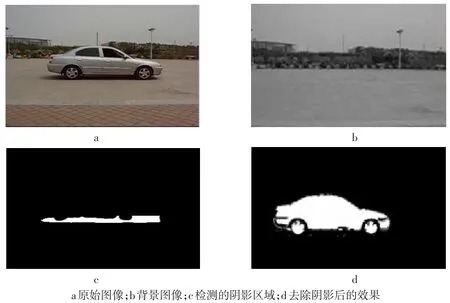
图4 单车辆阴影检测
3 结论
本文提出一种基于倒频谱分析方法和局部灰度梯度算子的阴影检测方法,首先通过算法判断阴影是否存在,为下一步是否使用阴影检测方法做出判断.其次基于区域块的Lab颜色空间L通道的倒频谱特性确定候选阴影块,最后对于候选阴影块的每一个像素灰度梯度算子的纹理特性获得阴影区域和背景区域的优化分割.结果表明,本算法鲁棒性强,时间复杂度低,具有很好的实际应用价值.
[1]董蓉,李勃,陈启美.路况视频中HSV彩色不变量阴影检测法研究与改进[J].中国图象图形学报,2009,14(12):2483-2488.
[2]李晗,武奇生.结合颜色相关性和纹理差异的阴影检测方法[J].计算机工程,2011,37(15):146-148.
[3]CHEN W,WANG F.Moving shadow detection in video surveillance based on multi-feature analysis[D].CMSP,2012,346: 224-231.
[4]RUI Q,SHENG G,ZHEN L.Moving cast shadow removal based on local descriptors[C]∥2010 International Conference on Pattern Recognition,2011:1377-1380.
[5]WANG J M,CHUNG Y C,CHANG C L,et al.Shadow detection and removal for traffic images[C]∥Proceedings of the 2004 IEEE International Conference on Networking,Sensing and Control,Piscataway,United States,2004,1:649-654.
[6]PRATI A,MIKIC C,TRIVEDI M M,et al.Detecting moving shadows:algorithms and evaluation[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,2003,25(7):918-923.
Shadow Dectection Based on Cepstrum and Local Gray Gradient Operator
ZHENG Ying,XIAO Su,ZHOU Ying
(School of Computer Science and Technology,Huaibei Normal University,235000,Huaibei,Anhui,China)
In order to solve the difficulties of extracting the wrong traffic parameters caused by the accuracy of shadow detecting methods in traditional intelligence traffic system,a method of shadow detection is pro⁃posed based on cepstrum and local gray gradient operator.Firstly,decide whether there are shadows present in an image.Secondly,cepstrum analysis of the intensity characteristics of Lab color space is used to obtain the shadow blocks.Finally,gray gradient operator is used to decide if the pixel is a shadow pixel or object pix⁃el.Experiments on different scenes suggest that effective detection rate of proposed method is over 85.3 per⁃cent,and can satisfy the requirement of real-time processing,and set a good foundation for the extracting of traffic parameters.
cepstrum;local gradient operator;direction cosine
TP 391.4
A
2095-0691(2015)04-0020-05
2015-03-12
安徽省高校自然科学研究一般项目(KJ2014B24);淮北师范大学校级青年项目(2012xq31)
郑 颖(1982- ),女,安徽宿州人,硕士,讲师,主要研究方向:模式识别与图像处理.
