Identification Method for Exciting Force Source Inside Underwater Structure Based on PSO_GA
2015-12-12XIAOYanSHANGDejiang
XIAO Yan,SHANG De-jiang
(a.Acoustic Science and Technology Laboratory;b.College of Underwater Acoustic Engineering,Harbin Engineering University,Harbin 150001,China)
0 Introduction
In the underwater acoustic domain,there are many noise source identification methods,such as method based on the multiple input/output model[1-2],adaptive noise cancellation method[3],power flow analysis[4],system identification method based on state space[5],and blind signal processing technology[6-8].In addition,sound intensity measurement method[9]and acoustic holography technology[10-12]are also widely applied to underwater structure noise source identification.The two methods are valid to identify the underwater sound noise.But the measurement requirements are relatively high,and the effects of the sound field boundary condition on the identification accuracy and stability are very huge[12].Most important is that these two noise source identification technologies are only based on the surface source strength of the structure but not the internal exciting force sources inside the structure.Other identification methods for the exciting force sources are most based on measurement results of the force sources signals which are hardly to be obtained accurately.In view of the identification method for underwater elastic structure exciting force source,a new matched field processing(MFP)method is proposed.
As an acoustic signal processing method,MFP technology is always the research hotspot.In recent years,the MFP technology is widely used in underwater target detection,passive positioning,the marine environment acoustic parameter inversion and other application aspects[13].When MFP technology is used for underwater structure noise source identification,the actual sound field measurement results and the model predicted results are matched processing.And the predict result which is closest to the actual result is regarded as the estimated value of the actual sound field.Then,the location,contribution and other information are obtained to identify the exciting force sources inside the underwater structure.Comparing with the NAH technology or the sound intensity measurement method,the selection for measurement points is more flexible.The design and the manufacture of the measuring array are more easily.And more,the purpose of this MFP identification method for exciting force source is to sort the contribution for the sound field of each exciting force sources inside the structure,but not the surface source strength of the structure.
1 The basic principle of exciting force source identification by MFP
In the MFP identification for underwater elastic structure exciting force source,the underwater structure and acoustic field are considered as a‘channel’,the spectrum characteristics of the exciting force source are seemed as‘input’.The surface vibration characteristics or the sound radiation characteristics of the underwater structure can be seemed as‘output’[14].The identification process can be mainly divided into two parts:the generalized copy field prediction and matched search.The sound pressures,vibrations,sound radiation power,or the acoustic radiation efficiency can be used as the quantities to be matched.They are collectively referred to generalized copy field.The generalized copy field is established by the numerical calculated result of the transfer function.Taken the sound pressure copy field as example,the specific identification method is as follows:
Step1:Building the structure numerical model
According to the actual underwater elastic structure,a finite element model is built.It is assumed that there are n exciting force sources inside the model,and there are m(m≥n)measurement points in the sound field.The unit frequency response function of i-th exciting force source is marked as Fi(1≤i≤n),the sound pressure of j-th(1≤j≤m)measurement point is marked as Pj,and the sound pressure transfer function from i-th unit exciting force source to j-th measurement point is marked as Hij.So Pjcould be calculated by the following equation:

where Δiis the source strength of the i-th exciting force source.
Step 2:Calculating the copy field of sound pressure transfer function
The sound pressure transfer function Hijis numerical calculated,and then the total sound pressure transfer function at the j-th measurement point Hican be expressed as follows:

where δiis the source strength proportion coefficient of the i-th source,0≤δi≤1.
From equation(1)and equation(2),it can be seen that the relationship of δiand Δiis as follows:

The copy field is constituted by all the total transfer functions:

Step 3:Constructing the objective function
When the copy field is matched with sound pressure measurement result,the measurement result and copy field are nearly in phase.Thus,the objective function for matching processing is constructed as follows:

Step 4:Searching for the optimal source strength
The optimal total sound pressure transfer function Hjis determined by optimal searching result ofwhich makes the corresponding FPjis most closed to zero.Then the source strength Δiis calculated by equation(3).Both the working condition and the source strength of each source can be determined.
The flow chart of the matched processing is shown in Fig.1.

Fig.1 The flowchart of exciting force source identification by MFP
2 The principle of the particle swarm optimization_genetic algorithm
Particle swarm optimization algorithm(PSO)was put forward by Dr.Eberhart and Dr.Kennedy.The algorithm is an evolutionary computation technique based on the swarm intelligence method[15].The system is initialized to a group of random solutions,and then the optimal value is searched by iterative method.The searching is simply following the optimal particles in the solution space.The advantage of the algorithm is that it can be easily implemented and with an intelligence background.Therefore,the algorithm is suitable for scientific research and especially for engineering application.
PSO algorithm is a well global optimization algorithm.It is mainly used for optimizing complex nonlinear functions,and can also be used to solve combinatorial optimization problems.Searching the extreme value of the objective function as formula(5)is actually an extreme value optimization problem for nonlinear function.Thus,the PSO algorithm is used to match searching the exciting force source strengths.In the optimization process,as the particle swarm is closer to the optimal particle,its speed is smaller.So the particle swarm has a strong homoplasy,and it is easily fallen into local minimum point[16].In order to enhance the global search ability,the PSO algorithm is combined with the genetic algorithm in this paper[17-19].
The matching search process is as follows:
①Take the weights of the response function δ1,δ2,…,δnas particles,so the dimension of each particle is as same as the number of the exciting force sources.The variables are defined as follows:
x:the current positions of the particles;ϑx:the particles fitness at the current positions;xbest:the optimum positions of the particles in current iteration process;ϑxbest:the particles fitness at the optimum positions in current iteration process;gbest:the global optimum positions of the particles;ϑgbest:the particles fitness at the global optimum positions.
②Initialize the positions of the particles x0,and then calculate the fitness ϑx0.The fitness of each particleis calculated by the following formula:

where M is the number of the particles in the particle swarm.FPjis as formula(5).
④Update the particles velocities and the positions by the equations as follows:

where k=1,2,…,N,N is the total iteration numbers.is the d-th dimension position component of particles i in k-th iteration process.is the d-th dimension velocity component of particles i in k-th iteration process.η1and η2are two random numbers inc1is the self acceleration constant of the particles,and c2is the global acceleration constant of the particles.is the d-th dimension component of the optimum positions in the k-1-th iteration process.is the d-th dimension component of the global optimum positions.w is the inertia weight,the coefficient to maintain the original particle velocity.Because the linear adjusting strategy for the inertia weight is simple and intuitive,the inertia weight is calculated by the linear gradient strategy:

where max w is the maximum value of inertia weight,min w is the minimum value of inertia weight.
⑥Estimate that whether the algorithm is fell into the local extreme value,the judgment formula is as follows:

If the algorithm is fell into the local extreme value,choose a positionwhich fitness sort is in front,two optional positionsandAnd then the crossover mutation is operated as the following formula:

After the variation,repeat step(5)until that the algorithm is not fell into local extreme value.
⑦Estimate that whether the algorithm could achieve the specified number of iterations or achieved the specified fitness value.If yes,the search process is over,the optimal positions and the corresponding fitness value are output.Otherwise,return to step④until achieve the maximum iteration number,or meet the requirements of fitness value.
3 Simulation analysis results
In order to verify the effectiveness of the PSO_GA for structure exciting force source identification,the algorithm is simulated in different conditions.A multi-excitation underwater single cylinder shell is established as the physical model.The finite element method(FEM)and boundary element method(BEM)are used in this paper to forecast acoustic radiation in the sound field and establish the generalized copy field of sound pressure transfer function.The interior medium of the structure is air and exterior medium is the infinite water.
The length of the shell is 1 m,the radius is 0.08 m,the thickness is 3mm,and the thickness of both end covers are 12 mm.The material parameters:Young’s modulus E=2.06×1011N/m2,Poisson’s ratio σ=0.3,density ρ=7 800 kg/m3.The fluid density ρ0=1 000 kg/m3,sound velocity v=1 500 m/s.
Take the model geometric center as the origin of coordinate,and the length direction as z axis.Calculate the sound pressure transfer functions from the exciting force source to the sound field point in the case that the source strength is 1 N and the force direction is radial outward.The research field points are distributed on a cylindrical surface which geometric center is consistent with the model.The radius of the cylindrical surface is 0.3 m,and the length of the cylindrical surface is 1.5 m.The copy field{}H for exciting force source matching analysis is consisted of the transfer functions at all the chosen research points.
Marked the algorithm threshold value as tc,so the algorithm terminates condition is:

The simulation conditions are as follows:
tc=0.000 1°,M=10,N=800,c1=1.49,c2=1.49,maxw=0.94,minw=0.4,fk=1.2,ζ=50%,and R=1.
It is supposed that there are four exciting force sources in the shell.The source strengths are separately marked as Δ1,Δ2,Δ3,and Δ4.The locations of the four sources areThe matched searching for the source strengths is carried out in different exciting force combination conditions.The number of the particles in one swarm M is 10,the number of iterations N is 800.The simulation results in different SNR(noise is additive)conditions are shown in Tab.1.

Tab.1 Simulation results of matched processing for the exciting force source

Continue Tab.1
As seen from Tab.1,the proportion coefficient of each exciting force source can be accurately searched by PSO_GA.The errors of source strength identification results are much less than 1%.As the SNR increasing,the accuracy is improving.When the SNR is larger than 40 dB,the search results are almost consistent with the default theoretical values.
The searing accuracy and times are analyzed in different threshold value conditions.The SNR is set as 40 dB.The default theoretical source strengths are Δ1=0.15,Δ2=0.25,Δ3=0.30,and Δ4=0.30.The algorithm threshold value tcis from 0.1°×10-2to 0.1°×10-5.The mean errors of the repeated 5 times simulations are shown in Fig.2,and the searing times are shown in Fig.3.

Fig.2 The searching accuracy in different threshold value conditions

Fig.3 The searching times in different threshold value conditions
As shown in the figures,the searching accuracy of the algorithm is improving and the searching time of the algorithm is increasing as the algorithm threshold value tcdecreasing.When tc<0.1°×10-3,the search results are almost consistent with the default theoretical values,and the searching times are tended to be stable.Therefore,the algorithm threshold value tcshould be considered with the actual problem.
4 The experiment results analysis
In order to verify the efficiency of the identification technology by MFP,the radiation sound pressures of a cylinder shell have been measured in an anechoic tank.The parameters of the measurement model are as the same as the numerical simulation model.The length of the elastic cylinder shell is 1 m,and the diameter is 0.08 m.There are two composite longitudinal vibrators inside the shell used for exciting force sources.The locations of the sources are as follows:

Fig.4 The scheme of the exciting force sources inside the shell
The shell is installed on the slewing arrangement in the anechoic tank,vertically put into the water.The geometric center of the shell is located at 2 m subsurface.The hydrophone array is vertically put into the water too.The array is composed of 12 hydrophones,the length of the array is 1.65 m,and the distance between the adjacent hydrophones is 0.15 m.The sound absorption materials could not be placed on the water surface above the shell and the hydrophone array,so the influence of the surface interference could not be ignored.
In order to ensure that difference of the direct sound pressure and the surface reflect sound pressure are more than 15 dB,the path difference of the direct sound and the reflect sound is approximately 6.Therefore,the distance form the array to the shell geometric center is 0.5 m,and the distance between the top hydrophone and the water surface is 1.25 m.
Using the two signal channels of the signal generation system to control the exciting force sources respectively,the two signals are switched in two power amplifiers in same type.The enlargement factors of the two power amplifiers are consistent during the measurement process.And it is must be sure that the SNR is more than 30 dB.The shell is rotated 15°every time,and the number of the times is 24.Then the sound pressures on a cylindrical surface whose radius is 0.5 m are measured.The sound pressure transfer function copy field is consisted of the measurement results when the two force sources are exciting separately.
The source strengths are searched by PSO_GA.The number of particles in one swarm M=10,and the max iteration number N=500.The algorithm terminates threshold value tc=0.01.The other conditions are as the same as the simulation condition.
The measurement results are matched processing with the copy field to obtain the source strength proportion coefficient.Then,the sound field is forecasted by the matched searching resultsThe partial searched results are shown in Tab.2.
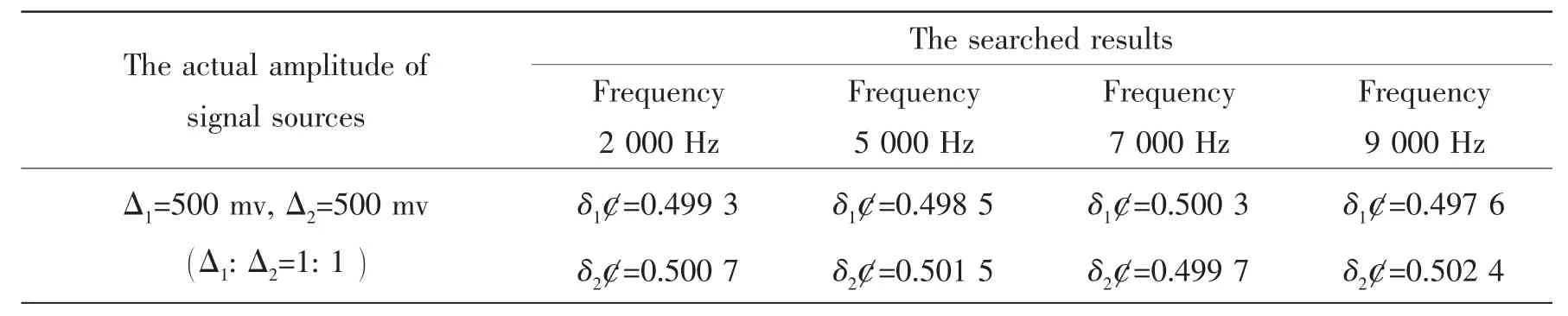
Tab.2 Searched results of the source strength proportion coefficient

Continue Tab.2
The measurement points on the circles at different depths parallel to xoy plane are taken as the research points.The radiation sound pressures forecasted results at frequency 7 000 Hz are compared with the measurement results as Fig.5.

Fig.5 The comparison results at the condition that f=7 000 Hz
As it can be seen from Fig.5,the forecasted results are close to the measurement results,but there are still prediction errors which can not be ignored.Therefore,the radiation sound power of the model is analyzed,the results is as follows.
From the Fig.6,the radiation sound power measurement results are almost the same with the forecasted results.Therefore,this method is very effective to identify and analyze the exciting force source strength inside the underwater structure.

Fig.6 The comparison results of the sound power
However,it must be clear that,the copy field used in the matched searching process is actually the radiation sound field measurement results when each exciting force source is working separately.If the copy field is consisted of the numerical simulation results,the higher numerical forecasting accuracy of the structure vibration and the radiation sound field are required.
5 Conclusions
The particle swarm optimization algorithm based on the mutation law of genetic algorithm is applied for searching the optimization force source strengths.The simulation analysis is taken in different conditions.And more,the feasibility of this algorithm is verified by the analysis results of measurement data.Both the simulation results and the experiment results show that:if both SNR and the algorithm terminate conditions are meet the requirements,the accuracy and efficiency are very high.And the sound field can be well forecasted by the matched searching results.Because the measurement requirements are not very strictly,this identification technology proposed in this paper will have very good prospects.
[1]Zhang Baocheng,Xu Xuexian.Method of analysis for quantitative estimation of contribution of submarine noise sources[J].Journal of Ship Mechanic,1997,1(1):57-66.
[2]Chakravorty P k.Identification of self noise sources in a ship[J].Naval Engineers Journal,1990,102:67-69.
[3]Jiang Guojian,Ren Keming,Ma Jie,Wang Huaiying.Estimating and rejecting the main self-noise of sonar-position by noise canceling method[J].ACTA ACUSTICA,1996,21:289-296.
[4]Li Tianyun,Liu Li,Liu Shiguang.Energy flow analysis method of identification of structure borne sound source[J].Chinese Journal of Mechanical Engineering,1999,35:29-33.
[5]Cho Yongman.Noise source and transmission path identification via state-space system identification[J].Control Eng.Practice,1997,5:1243-1251.
[6]Briolle F,Wan Chunru,Chee Hongtat,et a1.Blind separation of underwater sources in shallow water[J].Underwater Defence Technology Proceeding,1997,24:186-190.
[7]Peter WT Yuen.Enhancement of detection efficiency for minute signals embedded in large background using non-stantionarity[C].Underwater Defence Technology Proceeding,05-00-UDT-150,2000.
[8]Fay J,Menhta S K,Kirsteins I P.Application of principle component based face recognition methods to classify underwater signals[C].Underwater Defence Technology Proceeding.05-00-UDT-163,2000.
[9]Shi Shengguo,Yang Desen.An underwater sound intensity measurement system and its application to radiation noise measurement of underwater structure in the near-field[J].Journal of Test and Measurement Technology,2002,16:475-480.
[10]Williams E G.Continuation of acoustic near-fields[J].JASA,2003,113:1273-1281.
[11]Shang D,Liu Y.The investigation on sound source identification in semi-space by NAH[M].Acoustic 08 Paris.2008:749-754.
[12]Yang Diange,Zheng Sifa,Li Bing,Li Keqiang,Lian Xianmin.Video visualization for moving sound sources based on binoculars stereo and acoustical holography[J].ACTA ACUSTICA,2010,35:20-25.
[13]Baggeroer A B,Kuperman W A.An overview of matched field methods in ocean acoustics[J].IEEE Journal of Oceanic Enigeeing,1993,18:425-427.
[14]Dong Shumin,Liu Hongbo,Zhao bo,Liang Guolong.Study on method of parallel computing in match field localization[J].Application Research of Computers,2012,29(2):514-517.
[15]Kennedy J,Eberhart R C.Particle Swarm Optimization[C]//IEEE International Conference on Neural Networks.Piscataway,New Jersey,1995:1942-1948.
[16]Greengard L,Vladimir R.A fast algorithm for particle simulations[J].Journal of Computational Physics,1987,73(2):325-348.
[17]Shi Y,Eberhar t R.Fuzzy adaptive particle swarm optimization[C]//IEEE World Congress on Evolutionary Computation.Seoul,2001:101-106.
[18]Liu Chengyang,Yan Changqi,Wang Jianjun,Liu Zhenhai.Particle swarm genetic algorithm and its application[J].Nuclear Power Engineering,2012,33(4):29-33.
[19]Wang Xuemei,Wang Yihe.The combination of simulated annealing and genetic algorithms[J].Chinese J Computers,1997,20(4):381-384.
杂志排行

船舶力学的其它文章
- CFD Computation of Added Resistance for KVLCC2 Model in Head Short Waves
- Stress Field Analysis of 135-degree Sharp Corners Based on Notch Stress Strength Theory
- Review on Advances in Research of Ice Loads on Ice-going Ships
- Vibration Response Analysis of an Underwater Submersible
- Research on Numerical Simulation of Ship-ice Collision Based on MD Nastran
- Design of Energy Harvesting Efficiency of‘Haiyuan 1’Wave Power Generating Platform’s Buoy Testing System based on LabVIEW