Android智能终端遥控的无缆小口径测斜仪
2015-12-11王振国陈键
王振国,陈键
(重庆地质仪器厂,重庆 400033)
0 前言
测斜仪用于测量钻孔的方位角和顶角,按有无传输电缆分为有缆测斜仪和无缆测斜仪。有缆测斜仪需要专用电缆线连接井下探管与地面主机,仪器成本高,系统庞大,不易施工。无缆测斜仪不需要专用电缆,仅需用绳子固定探管便可测量,价格低廉,携带方便。现有无缆测斜仪可通过探管内的LCD读取测量结果,但是这种仪器每次测量,需下井前后拧开设置和读取结果,施工不方便,且反复拆卸易造成探管进水的风险。
为解决以上问题,JDDC-1无缆小口径测斜仪创新性地引入Andriod智能终端作为远端控制平台,进一步提高系统的便携性,更适合应用在西南喀斯特地貌等恶劣地质环境。以低成本的磁阻传感器为基础,以40mm的小口径为目标,以单点或连续多点工作模式独立完成钻孔的顶角和方位角测量。
1 系统介绍
1.1 系统原理
钻孔的方位角β、顶角α、工具面角γ是建立在地理坐标系ONWD和探管坐标系OXYZ的旋转变化的基础上的。探管坐标系OXYZ可由地理坐标系ONWD依次按照方位角β、顶角α、工具面角γ旋转后得到,如图1所示,具体的旋转过程:① 将地理坐标系ONWD绕OD轴顺时针旋转方位角β,得到坐标系OX1Y1D;② 将坐标系OX1Y1Z绕OY1轴顺时针旋转顶角α,得到坐标系OX2Y1Z;③ 将坐标系OX2Y1Z绕OZ轴顺时针旋转工具面角γ,得到探管坐标系OXYZ。
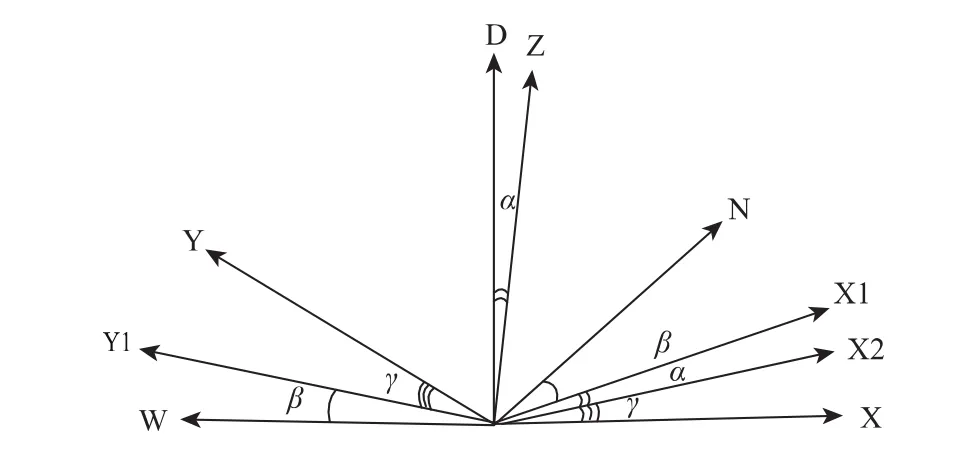
图1 探管坐标系与地理坐标系变换
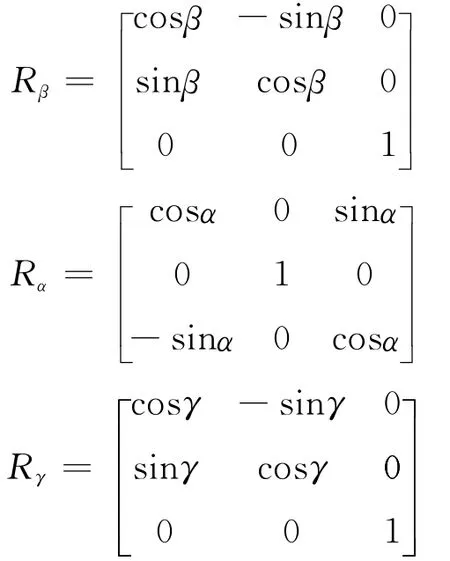
每次旋转意味着一次坐标变换,相应的坐标变换:
探管坐标系与地理坐标系的重力场和地磁场满足以下关系:
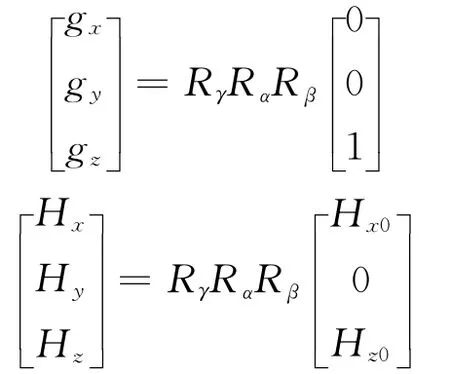
所以:

因此,JDDC-1无缆小口径测斜仪的顶角和方位角本质上是采集gx、gy、Hx、Hy及 Hz五个物理量,再进行失调、灵敏度校正补偿,经坐标变换解算而来。
1.2 系统特点
JDDC-1无缆小口径测斜仪包括探管和Android智能终端,没有绞车和地面主机,野外作业仅需钻井所用的钢丝绳便可下井测量。JDDC-1的主要特点体现在:
(1)JDDC-1采用三维磁阻传感器和两轴加速度传感器作为测量敏感元件,实现低成本、高稳定性的顶角和方位角测量;
(2)内置锂电池提供能量,利用存储器存储测量数据,摆脱测井电缆、绞车的约束,实现无电缆测斜;
(3)Andriod智能终端取(大规模使用的手机或平板)代替笔记本电脑,通过蓝牙实现无线控制和传输,降低系统成本,提高仪器的便携性,仅需用绳子固定探管便可测量。
1.3 仪器主要性能指标
a.顶角测量范围:0~50°,测量误差0.2°;
b.方位角测量范围:0~360°;测量误差3.0°(顶角3~50°);
c.测量方式:单点/连续测试(≤500样点);
d.可测井深:1500m;
e.工作电源:内置锂电池供电,一次充电可连续工作32小时;
f.探管外型:φ40mm×1180mm。
2 系统设计要点
2.1 系统整体设计
JDDC-1无缆测斜仪由探管与Andriod智能终端组成,探管包括测量腔、过渡连接头、电池腔、连接固定头组成,如图2所示。测量腔由倾角传感器、电路板构成。倾角传感器固定在探管的横截面上,通过导线与主电路板相连,三轴磁阻传感器焊接在主电路板上。三轴磁阻传感器的x轴、y轴分别与倾角传感器的x轴、y轴平行。过渡端由高硬度塑料加工而成,无线通讯模块内置过渡端。电池腔内包含四节锂电池,测量腔和电池腔由铜管制成。
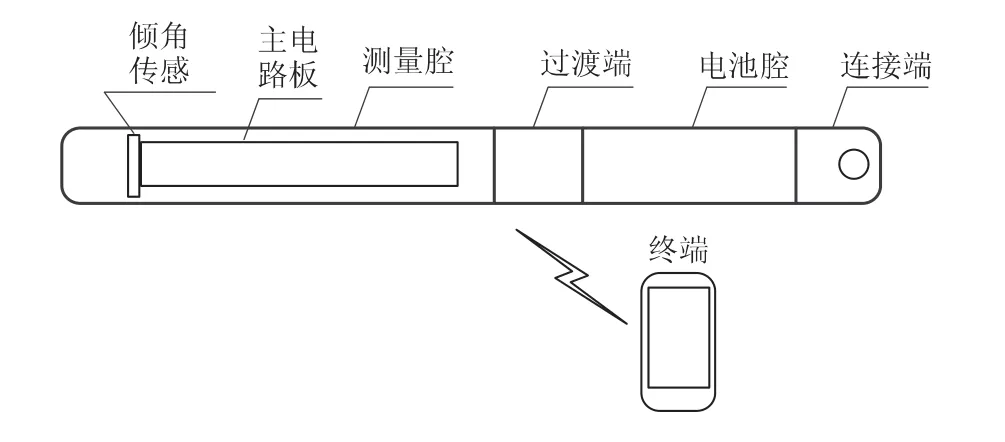
图2 无缆小口径测斜仪结构框图
测量腔由双轴倾角传感器、三轴磁场传感器、模数转换器、微处理器、存储器、电源管理模块、无线通讯模块组成。双轴倾角传感器获取重力加速度gx、gy,三维磁场传感器获取地磁场信号Hx,Hy,Hz。这五个信号经模数转换器量化后,传输给微处理器,微处理器计算出顶角和方位角,把结果存储在存储器内部,待所有点测量结束后,经无线传至Andriod终端。
2.2 核心传感器设计
三轴磁阻传感器是以霍尼韦尔的双轴磁阻传感器和单轴磁传感器为核心,经仪用放大器放大后,送至模数转换芯片。磁阻传感器的测量范围为6Gs,灵敏度为16mV/Gs,1/f噪声为4uGs(RMS)。磁阻传感器的本身的失调电压可通过置位与复位做差算出。
倾角传感器采用MEMS技术的双轴加速度传感器。在5V的直流供电下,其测量范围为±1g,失调误差为0.002g,灵敏度校准误差为±0.5%,正交敏感为4%,噪声为40ug。倾角传感器直接固定在测量腔的横截面上。在焊接、安装过程中,难免会引入安装误差,需要按照1.1所述的坐标旋转的方法,以绝对重锤线为基准,进行校准补偿。
2.3 整机低功耗设计
测斜探管供电以高效率开关电源为主,低噪声线性电源为辅。电源管理实行间歇供电的模式:每个电源模块均加上电源使能功能,在该模块需要工作的时候,则使能对应的供电电源,反之,该模块不需要工作的时候,则不使能该电源。
2.4 无线数传策略
测斜探管按照设定的时间点进行周期性存储式测量,待测量完成后,经过无线蓝牙传输的方式把测量数据上传至终端。微处理器将蓝牙传输模块映射为主从一体的串口通讯设备,当蓝牙设备与智能终端配对成功后,微处理器可直接进行分时双向通讯。
2.5 Andriod软件设计
Android终端应用软件是以Java语言为基础,在Eclipse的集成环境下开发的。Android终端作为蓝牙协议的主设备,搜索并连接周边的已开机的探管,建立起一对一串联通讯服务协议。软件的框架如图3所示,按照功能分为:蓝牙管理、测量计时、数据管理。
3 系统测试
3.1 顶角与方位角测试
图4是JDDC-1无缆小口径测斜仪的实物照片,包括提引环、电池筒、电路筒、重锤以及Andriod终端。
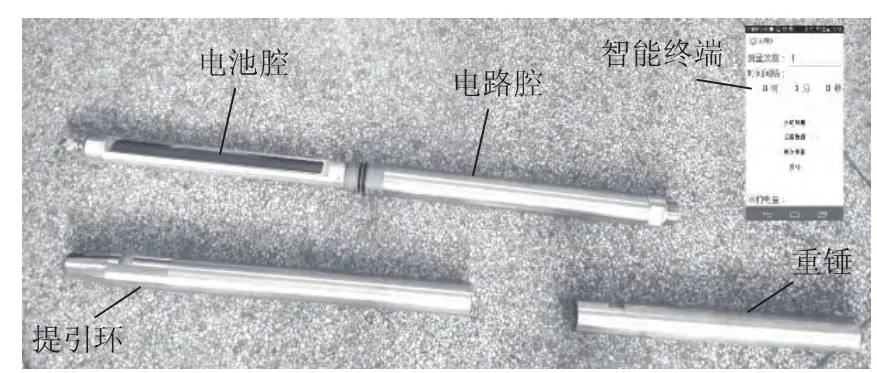
图4 基于Android智能终端的无缆小口径测斜仪
将JDDC-1无缆小口径测斜仪固定在已校平的测斜仪校准台上,保证测斜仪校准台周边无铁磁性物质。按照表格1所列举的顶角、方位角逐个测试,并填入表格。
3.2 误差分析
顶角误差主要是来自加速度传感器的失调误差、非线性误差及安装误差。安装误差虽然通过软件补偿的方法进行了校正,但实际中测斜校准台的0°存在误差,因此即使软件校准了同样存在误差,通过表1可知,样机的倾角误差均在0.1°内,满足设计指标。
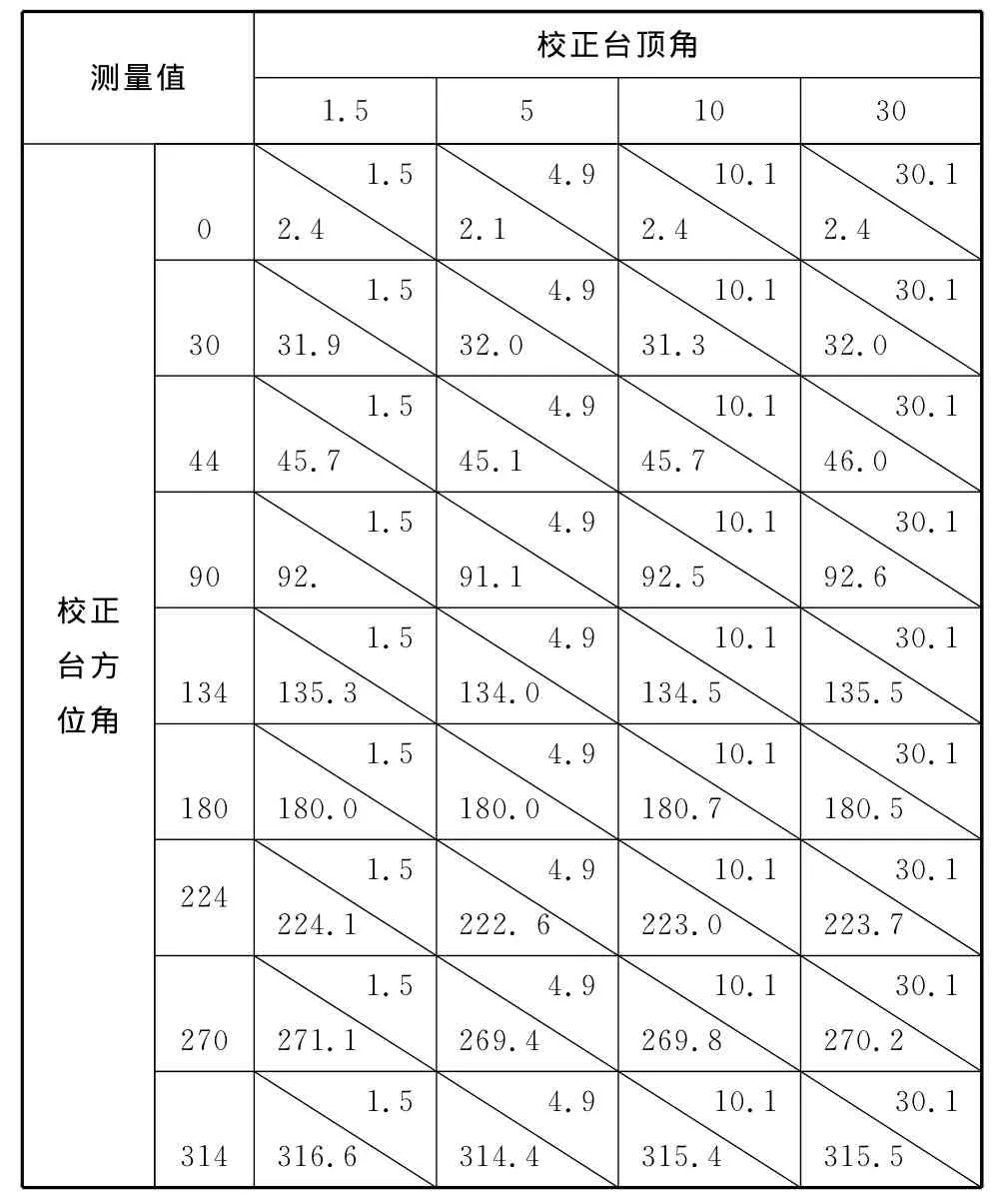
表1 校验台顶角与方位角测试数据 (单位:°)
根据方位角的计算公式,方位角的因素不仅与加速度三分量大小有关,而且还与磁场三分量大小有关,加速度传感器的误差经校准后,几乎可以忽略不计,但是磁传感器安装误差却很大,导致方位角误差相对较大。通过表1可知,样机的方位角误差均在3°内,满足设计指标。
4 结束语
本文详细介绍了Andriod智能终端遥控的存储式无缆小口径测斜仪的设计。在坐标矩阵变换的理论指导下,采用三维磁阻传感器和两轴加速度传感器作为传感部件,结合低功耗微处理器、电源优化管理技术,以蓝牙通讯协议为纽带,实现了低功耗、低成本、可靠性好、操作方便的顶角与方位角测量,更好地适应喀斯特地貌等恶劣的地质环境及土木建设等窄小空间的工程环境。
[1]郭海敏.生产测井原理与资料解释[M].北京:石油工业出版社,2007.
[2]谢川.一种基于磁强计和倾角传感器的钻井测斜仪[J].仪器仪表学报,2010(10).
[3]王岚.存储式随钻测斜仪的研制[J].煤田地质与勘探,2013(03).