EmguCV 耦合视觉引导的图像目标定位与补偿技术研究
2015-12-09王帮元
王帮元
(安徽经济管理学院 信息工程系,安徽 合肥230051)
随着电子行业产业化的推进,机器视觉技术在该领域内得到广泛应用,并且已在很大程度上推动了行业生产力发展[1-3].机器视觉的作用主要有:视觉引导、缺陷检测等[4-6],其中的目标定位是视觉引导的关键,也是前提,尤其是角点定位.在平板电脑自动组装中,电脑零部件背光板的位置经常需要传递给机器人的机械手臂,实现精准抓取.因此,对背光板顶点的准确定位直接影响到产品的质量和效率.对此,已有部分学者设计了相应的角点目标定位算法,并且达到了一定的效果.如利用梯度均方差进行特征分析后提取角点的定位算法[7].还有利用局部图像区域直方图特性定位角点的定位算法. 这些算法的实验结果表明其具有良好的视觉定位效果[8].尽管上述这些角点定位机制能够取得较好的效果;但是当目标存在干扰时,这些算法的定位精度较低,存在明显的定位偏差.
对此,本文提出了一个基于Emgucv 与视觉引导的定位机制.首先打通相机SDK 与C#-Emgucv 平台的数据通道,实现图像采集;然后基于轮廓匹配得到背光板区域,再通过最小矩形框定背光板后查找背光板顶点,实现定位.最后计算出水平、垂直方向偏移和旋转角度,实现基于视觉引导的机构补偿.最后通过实验,验证了本文算法与传统定位算法的定位性能.
1 本文整体定位与引导机制
由于一块反光板上有三个顶点需要定位,因此本文机制采用2 个摄像头分2 次抓取三个顶点所在视野,然后分别定位.考虑到C#在界面、运行效率、通信方面比较有优势,故选用C#语言开发软件系统,且在C#平台上调用Emgucv 也很方便.首先研究相机C#版本的SDK 底层函数,然后用C#进行调取,并且转换为bitmap、Emgucv 图像格式,实现相机取像、实时动态显示功能.
反光板上目标是三个顶点,如图1 所示.通过定位反光板上三个顶点来确定位置信息.取像完成后,首先对采集的目标区域进行轮廓查找,得到目标区域;再通过最小矩形框定得到目标的精确坐标;然后查找目标顶点;最后引入补偿计算模型,实现位移和角度补偿.以上过程采用C#平台与EmguCV 来实现.本文机制整体框架如图2 所示.
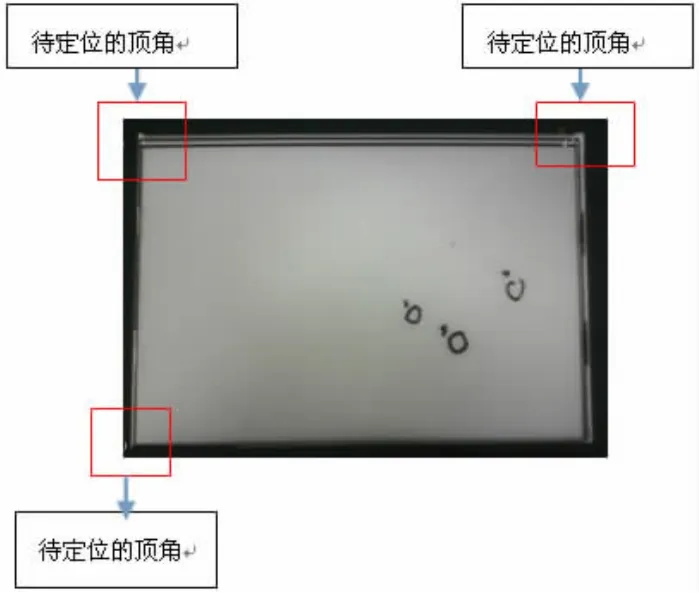
图1 反光板Fig.1 Backlight board
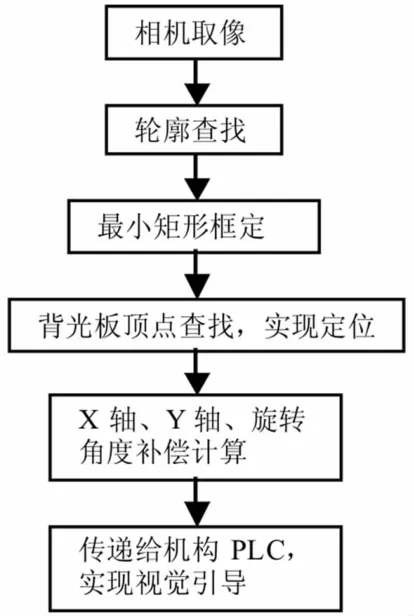
图2 本文定位与引导机制架构Fig.2 Positioning and visual guiding system architecture in this paper
2 基于相机SDK 数据转换的图像采集
首先基于相机C#版本SDK 进行二次开发,用C#语言编程调用SDK 底层相机采集函数,取出相机采集的图像裸数据,即二进制数据.然后,利用字节流转换的方法,将图像裸数据转换至C#支持的Bitmap 格式数据.最后利用索引调色板重构方式,转换到Emgucv 数据格式Image <>.由此得到PC-visual stadio 平台可以处理的数据格式,从而通过C#编程实现两个工业相机的数据采集,为图像处理打下数据基础.实时显示视频如图4 所示.
通过C#调用SDK,将相机采集的图像裸数据,转换为C#可以识别的数据流,继而转换为Bitmap 格式.由于索引图像格式存在伪彩,本研究采用索引表重构[11],转换Emgucv 平台图像数据格式Image,如图3 所示,为后续图像处理、定位打好数据基础.
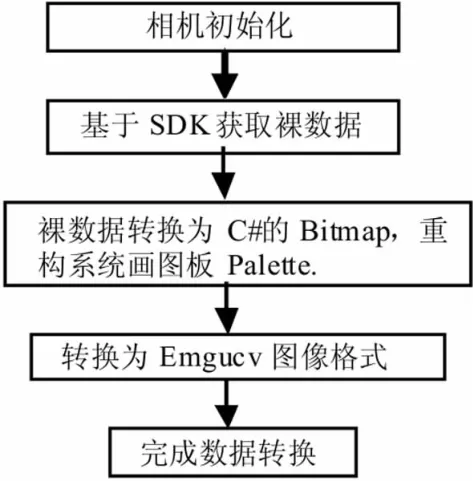
图3 数据采集与转换流程Fig.3 Data acquisition and conversion process
相机初始化部分代码:

相机SDK—C#-Emgucv 平台数据转换部分代码:


图4 本文双目视觉效果图Fig.4 Effect of double vision in this paper
3 基于Emgucv 的顶点目标定位
基于阈值分割和轮廓查找得到可能包含目标点区域,再利用Emgucv 的最小矩形框定函数cvMinAreaRect2,得到可能包含目标点的最小外接矩形区域,再通过查找顶点,得到顶点坐标;随后,与标准坐标相减后得到位置偏移和角度旋转.基于式(1)计算,得到X轴、Y轴补偿和角度补偿,即测量值与标准值得差值表示位移偏差和角度偏差.整体框架如图5 所示.采用轮廓查找,定位出目标.


图5 定位算法Fig.5 The positioning algorithm
式(1)中,x、y为实际坐标,Standard_x、Standard_y为标准坐标,Delt_X、Delt_Y为X、Y轴偏移.Juli为两顶点距离,Jiaodu为旋转角度;Real_distance为两点实际距离,Pixel_distance为两点像素距离,Bili为图像距离到实际距离的转换比例.
以图6 为待定位图像,经本文定位机制处理后,结果见图7.从图7 中可知,本文定位机制精确识别出角点.可见定位标示绿点准确的打在顶点上,代表定位成功.进而计算出水平、垂直、角度补偿,如图8 所示.图8 为软件界面部分截图,是补偿计算显示.

图6 原图Fig.6 The original image
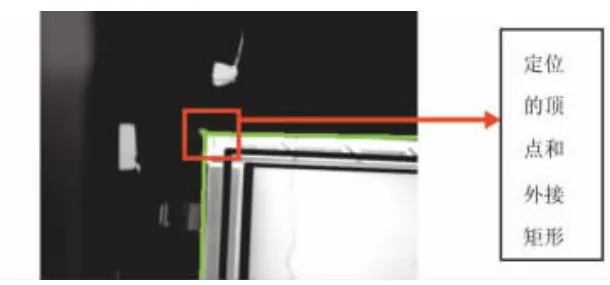
图7 处理效果图Fig.7 Processing result image

图8 补偿计算显示Fig.8 Display of compensation calculation
背光板顶点定位部分代码:


4 基于视觉引导的机构补偿
计算出位移和角度的补偿值后,本文利用PLC 实现位移、角度补偿.视觉软件完成对背光板X轴、Y轴位移偏移、旋转角度,即X轴、Y轴、角度补偿,软件通过串口通信将这些值传递给PLC 机构,PLC 转换为相应的动作.比如X轴偏移-4 mm,PLC 步进电机X轴方向多走4 mm,X轴偏移4 mm,PLC 步进电机X轴方向少走4 mm,Y轴偏移-4 mm,PLC 步进电机Y轴方向多走4 mm,Y轴偏移4 mm,PLC 步进电机Y轴方向少走4 mm,角度偏移-4°,PLC 旋转电机逆时针旋转4°,角度偏移4°,PLC 旋转电机顺时针旋转4°.
PLC 即可编程逻辑控制器,它采用一类可编程的存储器,用于其内部存储程序,执行逻辑运算、顺序控制、定时、计数与算术操作等面向用户的指令,并通过数字或模拟式输入/输出控制各种类型的机械或生产过程.当可编程逻辑控制器投入运行后,其工作过程一般分为三个阶段,即输入采样、用户程序执行和输出刷新三个阶段.完成上述三个阶段称作一个扫描周期.在整个运行期间,可编程逻辑控制器的CPU 以一定的扫描速度重复执行上述三个阶段.
部分PLC 关键代码:
5 实验与讨论
本文定位与引导机制,基于C#、EmguCV 编程完成对目标视野的取像,通过阈值分割、轮廓匹配、最小矩形框定、顶点查找得到目标的精确坐标.经过实验验证,在图像目标特征不明显,准确定位目标位置,如图9~10 所示.传统定位方式是基于静态大差异特征识别定位算法,在图像目标特征不明显,且背景复杂时,往往存在定位不准确,如图11~12 所示.
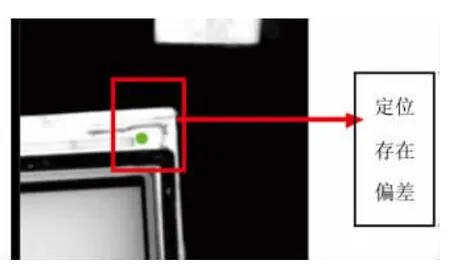
图11 传统算法效果图Fig.11 Effect of the traditional algorithm
随后,对十枚背光板进行检测,先用精密光学距离测量工具测算出实际物理偏移;然后分别用传统算法和本文算法测试,计算出偏移,然后综合取平均值后,结果见表1.从表中可知,本文算法的定位精度比传统技术要高,定位偏移非常小;而传统的角点定位技术产生了较大的偏移.

图12 传统算法效果图Fig.12 Effect of the traditional algorithm
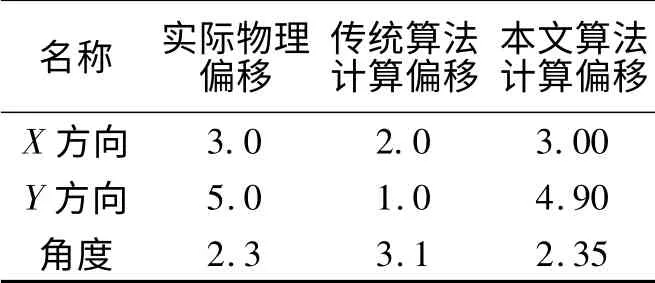
表1 测试数据表Tab.1 Table of data testing
6 结论
为了解决反光板顶点目标的定位问题,本文提出了一个基于EmguCV 与双目视觉的定位与引导机制.首先基于两个Basler 工业相机实现图像采集;然后基于轮廓查找与阈值分割处理得到目标的大致区域,再通过最小矩形框定和顶点查找得到目标的精确坐标.最后引入补偿计算机制,实现机构补偿.最后测试了本文机制性能,结果表明:与普通的图像目标定位算法相比,在图像目标特征背景复杂时,本文机制具有更好的定位与引导效果,准确定位出图像目标的坐标,并完成定位.
[1] 王忠勇.一种并联机械手视觉引导算法[J].计算机测量与控制,2013,13(17):4983-4986.
[2] 李龙.结构光视觉引导的轨迹跟踪系统的标定技术[J].计算机工程与应用,2013,18(11):383-387.
[3] 赵丹阳.火灾视频图像定位中特征点提取和匹配[J].计算机工程与应用,2013,36(4):181-185.
[4] 聂华.基于计算机图像定位的伺服平台研究[J].电子设计工程,2013,21(7):1906-1913.
[5] 李翀伦.复杂背景下红外图像目标的快速定位[J].海军工程大学学报,2013,33(10):2886-2890.
[6] 秦绪佳,桑贤生,程时伟.改进的规范化卷积图像修复算法[J].计算机辅助设计与图形学学报,2011,23(2):371-376.
[7] Noori H,Saryazdi S.A bilateral image inpainting[J].IJST Trans Electr Eng,2011,25(E2):95-108.
[9] 李虹.基于符号理据性的视觉引导系统设计研究[J].统计与管理,2014,18(15):482-4387.
[10] hmann J E,Appas T P,Neuhoff D.Structure texture similarity metrics for image analysis and retrieval[J].IEEE Transactions,2013,22(7):2545-2258.
[11] 龙水军.基于彩色轨迹引导的AGV 视觉导航方案研究[J].工具技术,2014,18(15):42-47.
[12] 王秀平.基于激光视觉引导的焊接机器人系统设计[J].煤炭技术,2013,21(7):906-913.