单目视觉无线机器人行走控制的设计与实现
2015-12-08马溪遥戴圣伟
徐 格,马溪遥,戴圣伟
(湖南工业大学 电气与信息工程学院,湖南 株洲 412007)
单目视觉无线机器人行走控制的设计与实现
徐 格,马溪遥,戴圣伟
(湖南工业大学 电气与信息工程学院,湖南 株洲 412007)
针对恶劣工作环境中,机器人操作复杂、视域不清等问题,提出单目视觉无线机器人控制设计方案。运用基于2.4 GHz频段的手持遥控器对机器人的行走进行远距离遥控,机器人通过摄像头对所在环境进行图像采集,采用WiFi技术将图像无线实时地传输到手机APP进行显示;同时,机器人也具有避障和防坠崖功能。实物模型运行结果表明,单目视觉解决方案是可行的,并且是有效的。
单目视觉;WiFi技术;遥控;行走控制;避障
0 引言
随着人类对自然界的探索和认识不断扩大,一些相对比较恶劣的工作环境不可避免地会出现,比如考古作业、火山探险、深海探索、核试验场地作业、化学工厂等,工作人员的人身安全和身心健康面临着巨大的威胁,有时甚至会导致死亡。
随着科技工作者的不断努力和科学技术水平的不断进步,一些性能较为出色的机器人被研发出来。在很多危险的工作环境中无线小型智能机器人已经用来代替人类完成人类无法完成的任务。例如,在2001年美国纽约世贸大厦坍塌的恐怖事件中,由于事发突然,有很多民众被埋在废墟之下。为了营救出更多的无辜市民,美国政府派出移动机器人进入废墟营救被困的受害者[1-2]。
从国外市场成长来看,无线小型智能机器人的应用有着广阔的前景,其中工业应用是其主要的业务范围。虽然对无线小型智能机器人的相关研究正在如火如荼地进行,但是由于技术封闭和成本昂贵、组装调试复杂、操作不易、视域不清等问题,无线小型智能机器人的应用还未得到普及。如果制造成本和运营环节成本得以进一步压缩,市场将会得以进一步拓展,无线小型智能机器人的应用将得以普及,并给开发制造商带来更大的利润。手机端视频显示APP在专业市场上取代已有的电脑图像显示程序是未来的潮流所向,进一步对手机端APP开发和简化,使用户界面更加友好、功能进一步完善,将会有更多的工厂和企业使用无线小型智能机器人。
1 无线智能机器人系统的结构
基于单目视觉的无线智能机器人的框架设计包括STC12C5A60S2主控制器、电机驱动模块、基于2.4 GHz频段的手持遥控器模块、图像采集及无线图像传输模块和避障及防坠崖模块和其外围电路的设计。用户可通过手持遥控器或手机端APP控制电机驱动模块从而控制机器人的行走;图像采集及无线图像传输模块将对机器人所在环境进行图像采集并基于WiFi网络实时传输到手机端APP显示;其携带的避障及防坠崖模块可自动检测前方障碍物,当检测到前方障碍物出现时,无线智能机器人将会强制停止行走并后退至安全距离。其系统整体结构框图如图1所示。
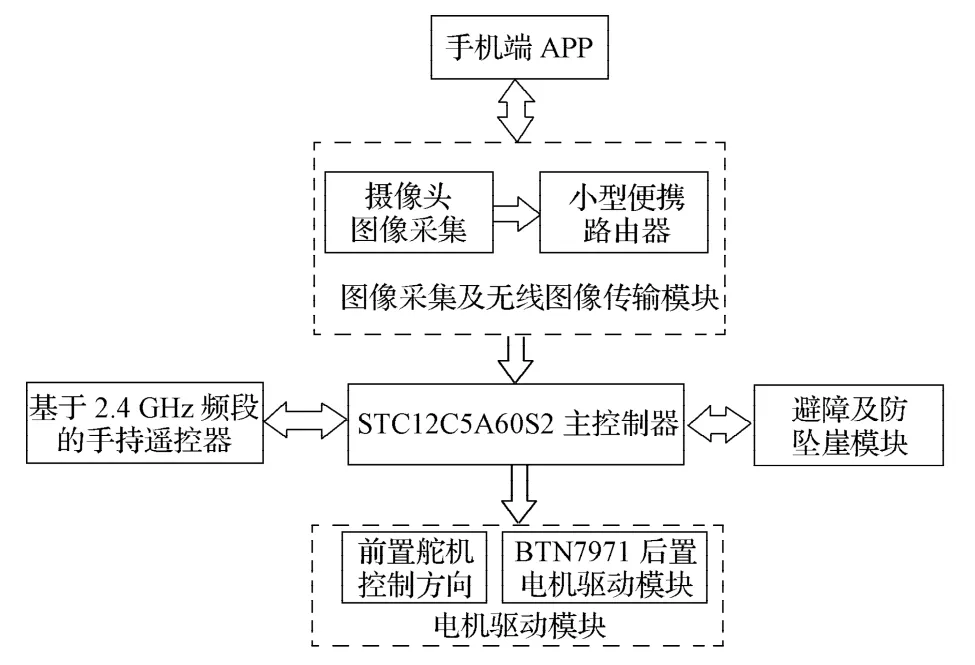
图1 系统整体结构框图Fig. 1 The overall system structure diagram
1.1 STC12C560S2主控制器
基于单目视觉的无线智能机器人选用宏晶科技公司生产的STC12CA5A60S2作为其主控制器,负责系统的整体控制。STC12C5A60S2系列单片机是低功耗、高速、超强抗干扰的新一代8051单片机,其内部集成了MAX810专用复位电路,2路PWM,8路高速10位A/D转换[3]。
1.2 手持遥控器模块
无线智能机器人采用基于2.4 GHz频段的手持遥控器,操作简便,其硬件组成框架如图2所示。手持遥控器包括以下模块:STC12C5A60S2主控制器、电源电路、按键及摇杆电路和NRF24L01无线通信模块。
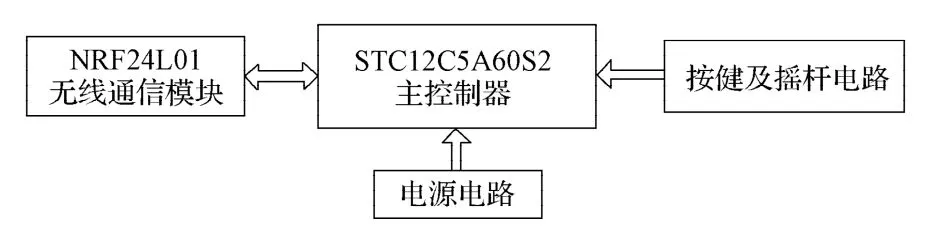
图2 手持遥控器的硬件组成框架图Fig. 2 The hardware frame diagram of the handheld remote controller
1.2.1 电源电路设计
设计的电源电路采用LM1117系列中的5.0 V和3.3 V的2款电源降压芯片[4],手持遥控器使用的是航模专用的电池,电压为7.4 V,工作状态下实际输出电压为8.4 V,需降压到5.0 V供STC12C5A60S2正常工作。此外,由于使用的NRF24L01无线通信模块的工作电压为3.3 V,所以需将5.0 V电压进一步降到3.3 V,其电源电路设计如图3所示,其中,图3a为8.4 V转5.0 V电源电路,图3b为5.0 V转3.3 V电源电路。
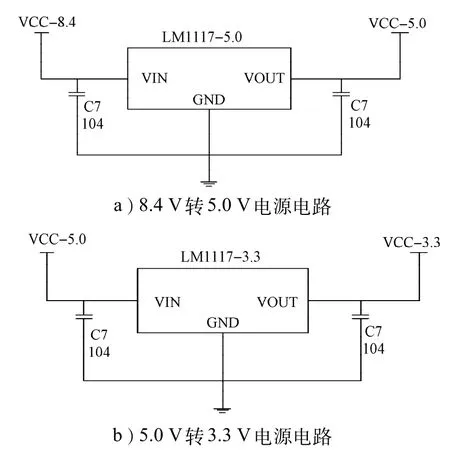
图3 手持遥控器电源电路图Fig. 3 The power circuit diagram of handheld remote controller
1.2.2 NRF24L01无线通信模块
为了实现手持遥控器和无线智能机器人之间的相互通信,选用2块NRF24L01芯片进行无线通信。NRF24L01是Nordic公司生产的一款无线通信芯片。在使用时,只需要为主控制器预留5个I/O口、1个中断输入引脚,就可以很容易地实现无线通信的功能,非常适合用来为小型单片机系统添加无线通信功能[5]。
1.2.3 按键及摇杆电路
手持遥控器上配备有左右8个按键和左右2个摇杆电位器,用来控制小型智能机器人的行走控制及摄像头拍摄角度。8个按键和主控芯片的8个I/O口一一相连;摇杆为一个电位器,当摇杆沿电阻体在某一方向移动时,在电位器的输出端即获得与位移量成一定比例关系的电阻值或电压,单片机通过自带的8路10位A/D转换对摇杆的输出端的模拟电压进行转换,即可得到数字量。具体连接电路如图4,其中,图4a为左按键,图4b为右按键,图4c为左摇杆,图4d为右摇杆。
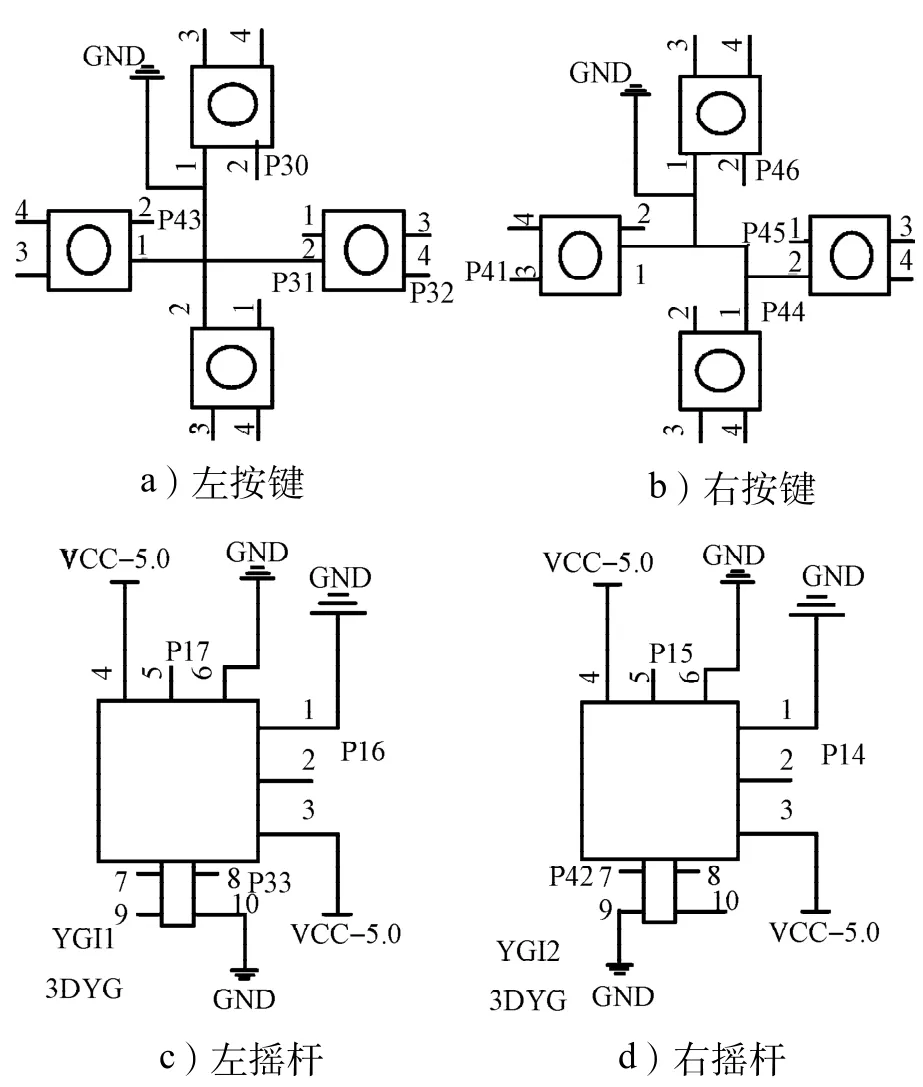
图4 按键及摇杆电位器电路Fig. 4 Button and rocker potentiometer circuit
1.3 图像采集及无线图像传输模块
本设计采用基于WiFi技术的图像采集与无线图像传输的方案[6]。摄像头选用USB摄像头模块,无线路由器选择了一款价格便宜且较稳定的无线小型路由器。通过对路由器进行进一步的软件改造,可以使其满足对无线图像传输的要求。
1.4 电机驱动模块
无线智能机器人选用BTN7971作为电机驱动模块的驱动芯片。BTN7971是一个独立的可通过高电流的半桥电机驱动芯片,它包含一个P沟道的高端MOSFET和一个N沟道的低端MOSFET[6]。
本电机驱动模块采用2块BTN7971芯片构成大电流H桥驱动,2路PWM输入能够实现电机正转反转[7]。此外,采用74LS244作为3态8位缓存器用作总线驱动器,并与单片机5 V隔离,有效地保护单片机。此外,该模块带有2个舵机接口,方便驱动舵机。具体电路设计如图5所示。
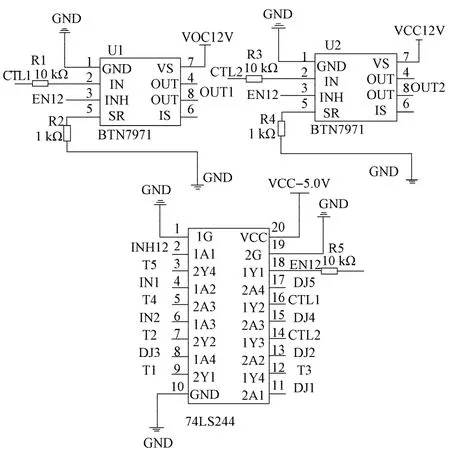
图5 BTN7971电机驱动模块电路Fig. 5 The drive module circuit of BTN7971 motor
1.5 避障模块
1.5.1 红外防坠崖模块
为了防止机器人前进时坠入深坑,机器人需自动检测前方路况,当前方有深坑时,应迅速后退防止坠落。为了实现该功能,本方案采用普通型的2路红外避障模块,由于防坠崖功能与避障功能的工作原理恰好相反且主控制器只能检测下降沿或低电平,所以需要采用一个或非门采集2路信号并输出一路信号送回至主控制器,这里选用四路两输入或非门芯片74HC02,其与两路红外避障模块的连接电路图如图6所示。
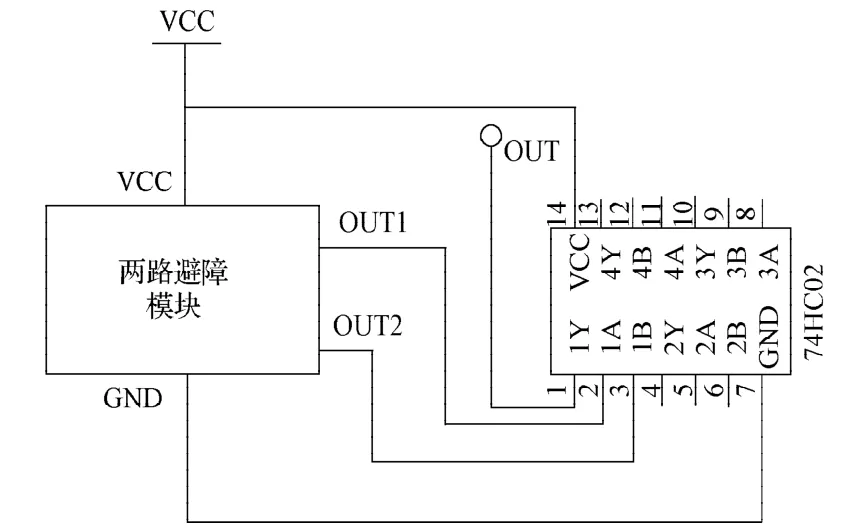
图6 74HC02或非门与两路避障模块连接电路Fig. 6 74HC02 NOR gate and two way obstacle avoidance module connection circuit
1.5.2 红外避障模块
当无线智能机器人前进时,若有障碍物阻挡时,机器人应强制停止并后退到安全距离。为了实现这一功能,采用一路增强型红外避障模块,该增强型红外避障模块可提供调节范围从3~100 cm的非接触式测距功能,测距精度可达高到3 mm[8]。该模块会自动持续地检测前方是否存在障碍物,当前方无障碍物时,该红外避障模块的OUT端输出持续高电平;反之,当前方有障碍物时,模块上的红色LED指示灯会发光,OUT端输出持续低电平。主控制器一旦检测到该低电平,将强制机器人自动后退到安全距离。
2 机器人的行走控制和无线图像传输的软件设计
2.1 机器人行走控制的软件设计
本行走控制程序从上电后开始执行,先初始化主控制器的I/O口、中断、定时器、串口和相关参数,然后初始化2块NRF24L01无线通信模块并尝试互相通信实现匹配,如果不能成功匹配,将重复匹配直到成功。
当系统和手持遥控器匹配成功后,无线智能机器人就按照用户的行走控制指令行走,并且机器人携带的避障模块会自动检测前方障碍物并规避至安全距离外。其行走控制流程图如图7所示。
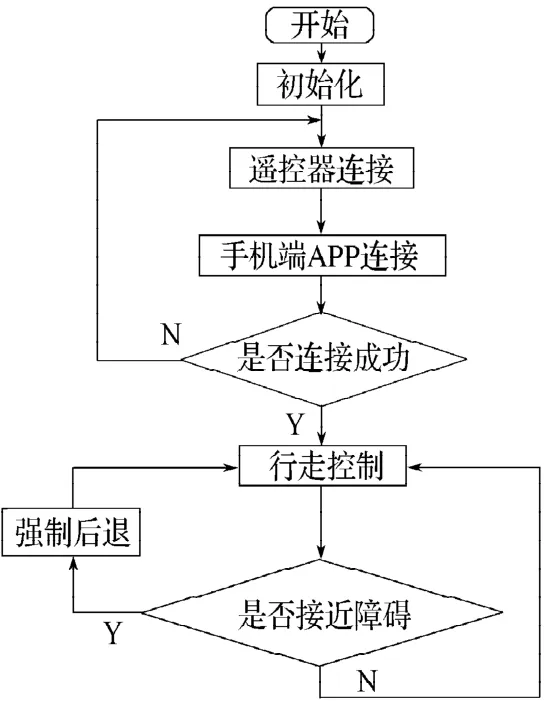
图7 行走控制流程图Fig. 7 Walking control flow diagram
2.2 无线图像传输的软件设计
首先需要将O p e n w r t固件刷写进路由器,Openwrt类似于一个小型的Linux电脑系统,用户可以方便地自定义功能来制作固件,也可以方便地移植实现各类功能的软件到Openwrt固件中。要安装和配置2个功能软件:一个是ser2net软件,它的功能是进行串口通信,是上位机与下位机沟通的桥梁。其安装过程为:使用winscp把ser2net.ipk传到路由目录,然后用putty登陆,执行命令行opkg install ser2net.ipk安装。另一个是mjpg-streamer,这个软件可以把USB摄像头的实时图像进行编码,然后通过WiFi返回给上位机,这样才能在上位机看到视频。其安装命令为opkg install mjpg-streamer,安装完毕后,运行/etc/init.d/mjpg-streamer start就可以启动了,并可以在路由器设置页面设置视频的各项参数。
3 实物模型的功能调试及实现
按照系统设计的整体框架,系统硬件采取模块化设计,可独立调试各个硬件模块要实现的功能;最后将各个模块拼接为整个系统,进行整体调试,使系统功能得到实现。
3.1 机器人行走控制的实现
通过改变PWM的占空比来对后置电机(负责前进和后退)调速以及对舵机进行角度控制进而实现无线智能机器人的行走控制且控制简便。如图8所示,无线智能机器人可以实现前进、后退、左转和右转的行走控制,其中,图8a为前进,图8b为后退,图8c为左转,图8d为右转。
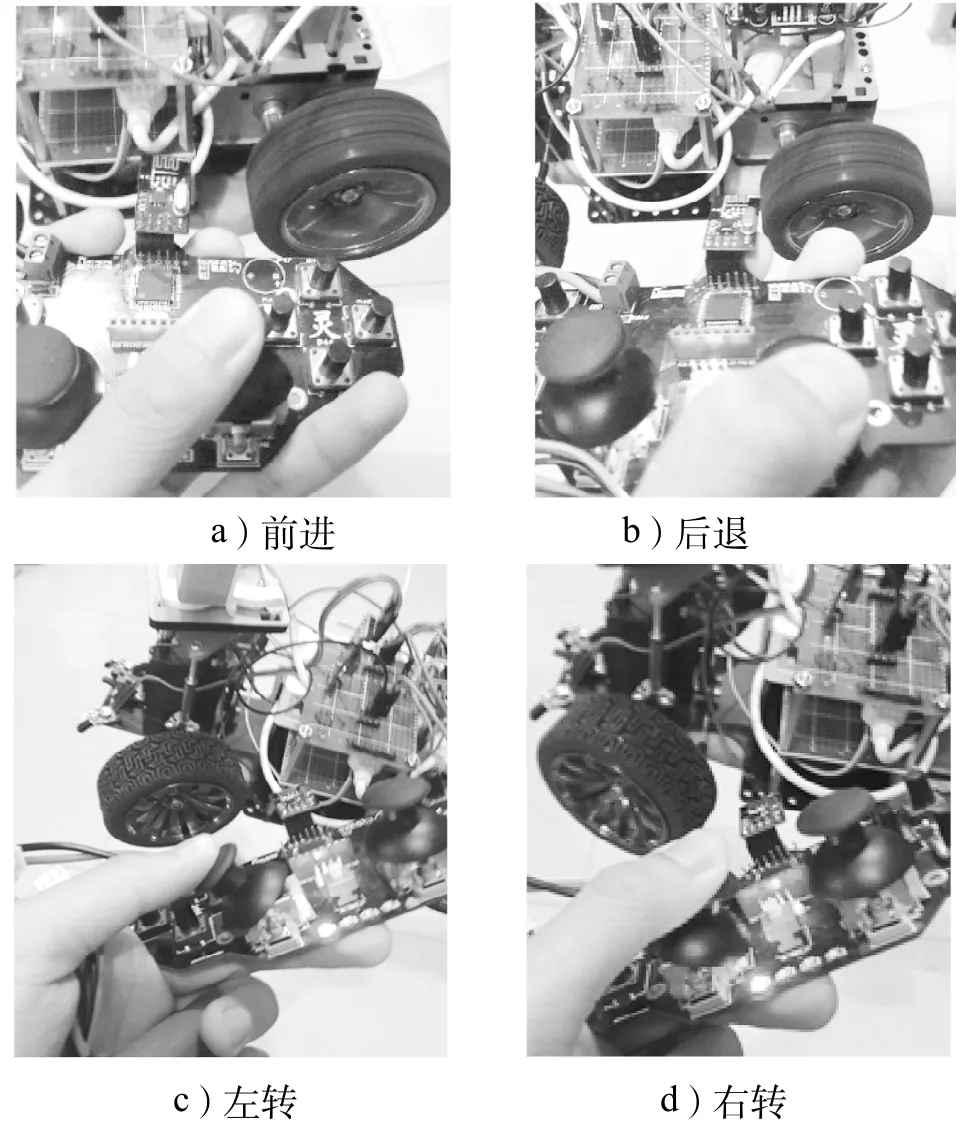
图8 无线智能机器人行走控制的实现Fig.8 The realization of wireless small intelligent robot move control
3.2 红外避障模块功能调试
分别设置增强型红外模块和2路普通型红外模块的检测距离为20 cm和5 cm。当无线智能机器人检测到前方有障碍物,机器人会强制后退至安全距离外,如图9所示。
3.3 图像采集及无线图像传输的实现
机器人通过自身携带的摄像头对周围环境进行图像采集并通过基于无线小型路由器产生的WiFi网络将图像传输回手机端APP进行显示,图像传输速率较快,图像较为清晰,其传输图像的过程如图10所示。
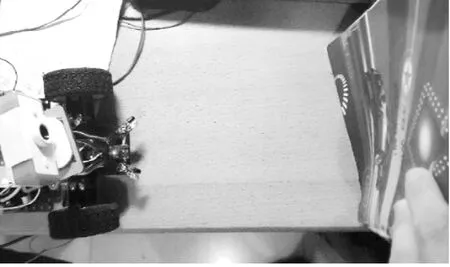
图9 避障功能的实现Fig. 9 The realization of obstacle avoidance function
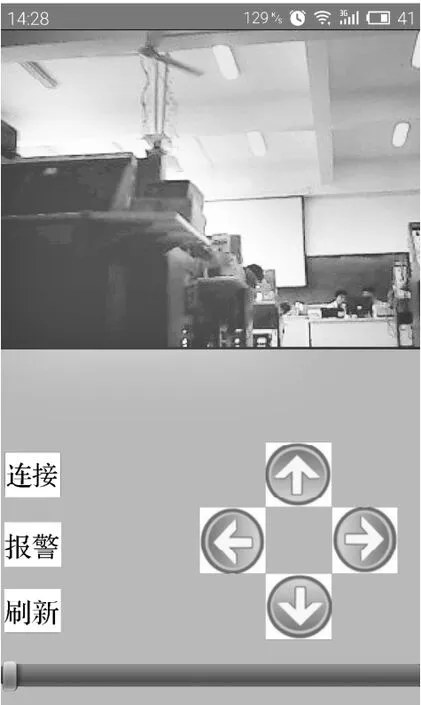
图10 图像采集及无线图像传输的实现Fig. 10 The realization of image acquisition and wireless image transmission
4 结语
针对恶劣工作环境中,机器人操作复杂、视域不清等问题,课题组提出单目视觉无线机器人控制设计方案。该设计方案对中短距离的通信有较强的指导价值,对小型机器人行走控制的改善设计有一定的借鉴意义[9]。
[1]Ye Changlong,Ma Shugen,Li Bin. Development of a Shape-Shifting Mobile Robot for Urban Search and Rescue [J]. Chinese Journal of Mechanical Engineering,2008,21 (2):31-35.
[2]蔡自兴,贺汉跟,陈 虹. 未知环境中移动机器人导航控制研究的若干问题[J]. 控制与决策,2002,17(4): 385-390. Cai Zixing,He Hangen,Chen Hong. Several Issues of Mobile Robot Navigation in Unknown Environment Control Research[J]. Control and Decision,2002,17(4):385-390.
[3]宏晶科技.STC12C5A60S2系列单片机指南[EB/OL]. [2015-03-27]. http://www.stcmcu.com/datasheet/stc/ STC-AD-PDF/STC12C5A60S2.pdf. Hongjing Tech. STC12C5A60S2 Datasheet [EB/OL]. [2015-03-27]. http://www.stcmcu.com/datasheet/stc /STC-ADPDF/STC12C5A60S2.pdf.
[4]董 涛,刘进英,蒋 苏,等. 基于单片机的智能小车的设计与制作[J]. 计算机测量与控制,2009,17(2):380-382. Dong Tao,Liu Jinying,Jiang Su,et al. Design and Realization of Intelligent MiniCar Based on Single Chip Control[J]. Computer Measurement & Control,2009,17 (2) :380-382.
[5]陈华东,周 健,蒋 平. 自主式移动机器人的无线控制实现[J]. 测控技术,2001,20(11):45-47. Chen HuaDong,Zhou Jian,Jiang Ping. Realization of Wireless Control on Autonomous Mobile Robot[J]. Measurement and Control Technology,2001,20(11):45-47.
[6]贾定宏,何智力,韦升俊. 基于单片机的无线遥控小车研制[J]. 硅谷,2010(12):47. Jia Dinghong,He Zhili,Wei Shengjun. Development of Wireless Remote Control Car Based on Single Chip Microcomputer[J]. Silicon Valley,2010(12) :47.
[7]刘 鑫,葛宝明. 基于单片机的双步进电机协调运动控制器设计[J]. 电气应用,2007,26(3):65-68. Liu Xin,Ge Baoming. Design of Two-Dimensional Harmonized Motion Controller Based on Micro Controller for Double Stepper Motors[J]. Electrotechnical Application,2007,26(3) :65-68.
[8]戴圣伟,陈白帆,范绍成. 无线遥控智能车的控制研究[J]. 计算机测量与控制,2011,19(9):2125-2127. Dai Shengwei,Chen Baifan,Fan Shaocheng. Control and Study of Wireless Control System of Intelligent Vehicle[J]. Control and Decision,2011,19(9) :2125-2127.
[9]戴圣伟,胡沁春,周 玉. 深海采矿车行走的专家模糊控制[J]. 控制与决策,2010,25(1):141-144. Dai Shengwei,Hu Qinchun,Zhou Yu. Fuzzy Expert Control Over the Walking of the Deep-Sea Mining Vehicle [J]. Control and Decision,2010,25(1):141-144.
(责任编辑:申 剑)
Design and Implementation of Moving Control of a Wireless Robot Based on Monocular Vision
Xu Ge,Ma Xiyao,Dai Shengwei
(School of Electrical and Information Engineering,Hunan University of Technology,Zhuzhou Hunan 412007,China)
For the problems of complex operation and unclear vision in harsh work environment, proposes a design scheme of wireless small intelligent robot based on monocular vision. Uses a hand-held remote controller based on 2.4 GHz spectrum to control the small intelligent robot moving, the robot acquires environmental images with camera and transmits the images real-time to the phone APP for displaying by WiFi technology. In addition, the robot also has the function of avoiding obstacle and anti falling off cliff. The physical model working results show that the monocular vision solution is feasible and effective.
monocular vision;WiFi technology;remote control;move control;obstacle avoidance.
TP274
A
1673-9833(2015)05-0067-05
10.3969/j.issn.1673-9833.2015.05.014
2015-06-19
国家级大学生创新训练基金资助项目(201411535005),湖南工业大学校级重点教改基金资助项目(2014A05)
徐 格(1995-),女,安徽合肥人,湖南工业大学学生,主要研究方向为电气工程及自动化,E-mail:490890554@qq.com
马溪遥(1993-),男,河南洛阳人,湖南工业大学学生,主要研究方向为电子信息工程,E-mail:495342566@qq.com
