基于Unity3D的撒肥机三维建模与作业环境仿真平台的搭建
2015-12-08师翊李思莹李媛媛路阳刘桂阳
师翊,李思莹,李媛媛,路阳,刘桂阳
(黑龙江八一农垦大学信息技术学院,大庆 163319)
基于Unity3D的撒肥机三维建模与作业环境仿真平台的搭建
师翊,李思莹,李媛媛,路阳,刘桂阳
(黑龙江八一农垦大学信息技术学院,大庆 163319)
以撒肥机械为例,搭建一个通用的农机仿真平台。使用Pro/E和3DS Max对撒肥机进行三维建模,将建立好的三维模型完整导入到Unity3D软件当中,建立农田、道路、草木等地表环境的虚拟场景。利用软件自带的物理引擎对撒肥机的机械传动原理和工作状态进行虚拟仿真,为建立农机虚拟仿真平台打下基础。
农业机械;三维建模;仿真平台
随着信息技术的发展,农业机械与计算机技术相结合成为现代化农业技术发展的趋势,也逐步成为热点研究课题。
农业机械的研究常常伴随着大量的论证与试验[1-2],以满足在不同的作业环境下机械性能、作业效果等方面的要求。为此,需要建立试验田地,等待必要的农时和营造特定的地块环境(如土质、坡度、地块形状等),同时需要投入大量的仪器设备和人力获取试验信息。近年来,计算机虚拟现实技术为农业机械的研究提供了新的方法。
农机的仿真研究主要分为农机机械结构的三维建模和作业环境的仿真模拟[3]两大部分。采用Pro/E和3DS Max来完成三维建模部分,撒肥机各个部件的数据全部来自于撒肥机电子图纸。将在Pro/E下建立好的整机模型导入到3DS Max中,调整坐标轴,然后将模型导出为.FBX格式以便于后期在Unity3D软件里使用。作业环境仿真模拟部分主要在Unity3D软件里完成,Unity3D软件是一款物理引擎,它真实模拟了现实世界中的物理效果,如碰撞、重力、摩擦、地形起伏等,这些是影响农机工作的主要因素。同时,Unity3D软件提供了丰富的用户接口,为搭建农机研究的虚拟仿真平台提供了极大方便。
1 结构与工作原理
1.1 整体结构
2FL型撒肥机主要由地轮机构、传动机构、机架、
支架、开门机构、肥料箱、搅肥机构、抛洒机构和各部分衔接零件构成,如图1所示。

图1 撒肥机整体结构Fig.1The structure of fertilizer applicator
1.2 主要部件结构
1.2.1 链轮传动装置
如图2所示,此装置主要由主动链轮、从动链轮和传动链条组成。主动链轮30齿,齿轮分度圆直径156 mm,从动链轮13齿,分度圆直径66 mm,链条为滚子链。链轮结构的轴心距为393 mm。

图2 链轮传动装置Fig.2The chain-wheel mechanism
1.2.2 撒肥箱
如图3所示,撒肥箱主要由肥料箱、肥量控制盘和抛洒装置构成。为了使肥料能够平滑地向下滑落,肥料箱设计为倒圆锥形,深度612 mm,上锥圆直径940 mm,下锥圆直径220 mm,抛洒盘直径300 mm,撒肥箱满载肥料容量640 L。
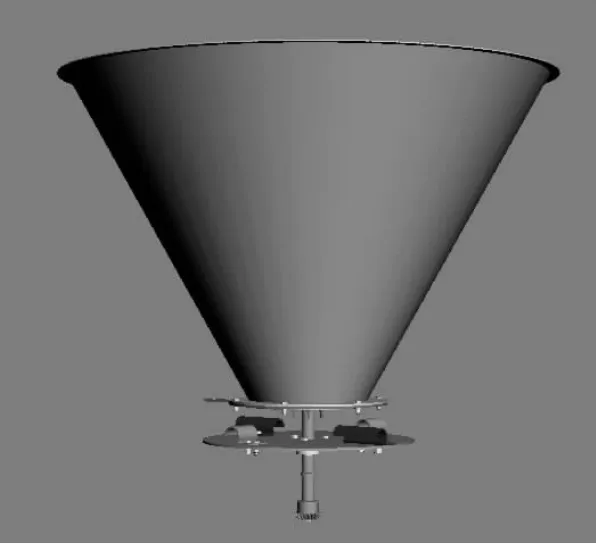
图3 撒肥箱Fig.3The fertilizer box
1.3 动力传递原理
如图4所示,撒肥机为牵引式撒肥机,当机车牵引撒肥机向前运动时,撒肥机地轮带动链轮结构的主动轮转动,主动轮通过链子带动从动轮转动,从动轮带动两个互为90度的齿轮转动,达到转动方向的转化,最后带动撒肥盘的转动。撒肥盘的转动速度决定了撒肥机的工作幅宽,撒肥圆盘如果转速过大,作业时粉状或小颗粒肥料易漂移,造成肥料的损失而且污染环境,本仿真设计中将撒肥圆盘转速确定在8.5×102r·min-1左右,相对应的撒肥机机车行进速度为10 km·h-1,工作幅宽12 m。

图4 传动原理Fig.4The principle of motion transfer
2 三维模型的建立
2.1 主要部件三维建模
撒肥机是一个比较复杂的机械系统,包括地轮、传动链轮、撒肥盘、齿轮箱、抛洒机构、搅肥机构、机架等部件,如果按照实际构造进行建模,工作量非常巨大。因此根据研究目的,在建模时对撒肥机的结构进行适当的抽象、简化。需要注意的是,为保证仿真结果与实际接近,应保证各部件总质量应与撒肥机实际质量接近。这一点可以在Unity3D软件中得到解决,软件中自带的物理引擎很好地模拟了真实世界中重力、质量、摩擦等物理参数。
建模时主要在三维建模平台Pro/E中建立各零件的实体模型,由于整机有非常详细的电子版图,电子版图为我们提供了详细的数据参数,根据电子图纸提供的数据,直接在Pro/E中进行装配,焊接,完成实体模型的建立。
三维建模的具体步骤是,将电子图纸导入到三维软件当中,选择点模式,将距离近的散点焊接到一起,然后选择线模式,转换为可编辑多边形,在线模式下模型会自动封闭,然后使用挤出工具在面模式下根据图纸上的数据挤出相应的高度,使用缩放工具输入模型的截面边长、面积等数据,最后调整模型的坐标轴,一般将坐标轴居中至模型的几何中心,调整完毕后将模型存为FBX格式放入工程文件根目录下。
2.2 坐标和轴的调整
模型坐标[4]的调整主要在3DS Max软件里完成。在Pro/E里面完成的模型不能直接导入到Unity3D软件当中,需要用3DS Max进行格式转化,当模型导入到3DS Max中时,原本的坐标会发生变化,需要在3DS Max中重新对正。并且需要根据实际的运动情况,重新调整模型轴的位置,调整完毕后,保存为FBX格式,最后将完成的模型直接拷贝到Unity3D工程文件根目录下。
3 仿真平台的搭建
3.1 地形信息的获取
地形信息的获取主要通过谷歌地球来实现。需要安装软件谷歌地球和Sketch Up Pro版。首先通过谷歌地球定位农场的位置,将高度拉到500 m,接着打开Sketch Up软件,选择工具:谷歌地球:获取当前视图,然后选择工具:谷歌地球:绑定地形。此时可以获得一些地形的网格模型,但是模型重叠在一起,需要重新校对位置。返回谷歌地球,选择文件:保存:保存图片,保存下来的图片用来后期的贴图使用。将获取到的三维网格地形保存为3ds格式,导入到3DS Max里将分散的网格一一组合,绘制出完整地形。将前面保存的贴图文件用Photoshop打开,将重叠的部分分开,最终合并为一张大图。将调整好的地形三维模型导入到Unity3D软件当中,在地形上加上mesh collider(网格碰撞),在脚本编辑窗口下运行terrainData.GetHeights和terrainData.SetHeights方法,获取和设置地形的起伏,最后将材质赋给地形,将材质的大小和地形的解析度设为一致即可。
3.2 物理引擎内具体参数的设置
在本仿真设计中,影响仿真结果的主要因素是零件的尺寸、质量和摩擦力,零件的尺寸主要依靠图纸中的数据来约束,质量和摩擦需要依靠Unity3D软件里的自带的物理引擎[5]来实现。将建立好的撒肥机模型导入到软件当中,给所有零件附加刚体属性,如图5,Mass是指物体的质量,单位为KG,每个零件具体的重量需要查阅图纸获得。Drag是动摩擦因数,此参数实现摩擦力效果,一般设为0.1。Angular Drag是指转角阻力[6],用来模拟空气阻力,默认设为0.05即可。
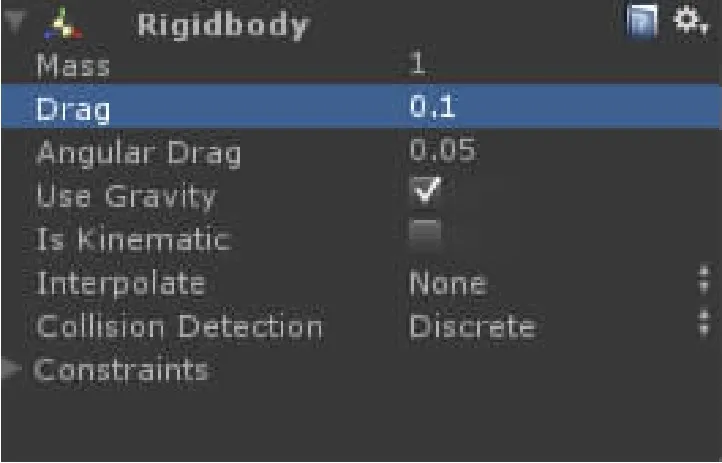
图5 刚体属性Fig.5The rigidbody attribute
将上述设置完成后,影响仿真结果的主要参数设置完毕。
4 结论
研究主要介绍了虚拟现实技术在农机仿真中的应用,把用到的主要技术和需要设置的参数做了扼要说明。通过计算机技术和农机学科相结合的方法,将农机研究信息化,极大推动了农机的发展,同时运用主流的三维软件和物理引擎[7],搭建出一个仿真平台,用平台自带的物理效果和脚本编辑功能实现对机械的动态控制,使仿真结果更加接近实际情况,为搭建交互式集成化农机仿真平台奠定了基础。
[1]谢秋菊,刘桂阳,马铁民,等.基于Eon的发动机机构运动虚拟仿真研究[J].黑龙江八一农垦大学学报,2009,21(3):84-86.
[2]阎楚良,杨方飞,张书明.数字化设计技术及其在农业机械设计中的应用[J].农业机械学报,2004,35(6):211-214.
[3]藏宇,朱忠祥,宋正河,等.农业装备虚拟试验系统平台的建立[J].农业机械学报,2010,41(9):70-74.[4]李杰,阎楚良,杨方飞.基于虚拟样机技术的联合收割机切割机构的仿真[J].农业机械学报,2006,37(10):74-76.
[5]王乘,周均清,刘利军.Creator可视化仿真建模技术[M].武汉:华中科技大学出版社,2006.
[6]李佳,闫清东,王一拙.基于ADAMS和Vega的地面机动武器仿真系统的研究[J].计算机仿真,2006,23(2):236.
[7]刘金明,刘桂阳.基于GPU光线投射算法的心脏体数据可视化[J].黑龙江八一农垦大学学报,2013,25(6):78-81.
Implementation of Agricultural Machine 3D Modeling and Simulation Platform Based on Unity3D
Shi Yi,Li Siying,Li Yuanyuan,Lu Yang,Liu Guiyang
(College of Information and Technology,Heilongjiang Bayi Agricultural University,Daqing 163319)
The fertilizer distributor was selected as the example to built a common agricultural simulation platform.Pro/E and 3DS Max were used to complete 3D models,which imported the models into Unity3D and built virtual scene such as road,grass and trees. The physics engine software was used to complete the virtual simulation of mechanical transmission principle and the work state,which provided the foundation for the establishment of agricultural virtual simulation platform.
agricultural machine;3D modeling;simulation platform
TP391.9
A
1002-2090(2015)02-0097-03
10.3969/j.issn.1002-2090.2015.02.022
2014-06-28
黑龙江省自然科学基金面上项目(F201428);黑龙江八一农垦大学研究生创新科研项目(2014);黑龙江省高等教育教学改革项目(黑教高函2013-351号文件项目号365)。
师翊(1990-),男,黑龙江八一农垦大学信息技术学院2012级硕士研究生。
刘桂阳,男,教授,硕士研究生导师,E-mail:guiyangliu@126.com。
