月面机器人探测路线图及典型方案研究
2015-12-08曾令斌邱宝贵邵济明李保江
曾令斌,邱宝贵,肖 杰,邵济明,李保江,叶 亮
(1.上海宇航系统工程研究所,上海201109;2.上海市空间飞行器机构重点实验室,上海201109)
月面机器人探测路线图及典型方案研究
曾令斌1,2,邱宝贵1,2,肖 杰1,2,邵济明1,2,李保江1,2,叶 亮1,2
(1.上海宇航系统工程研究所,上海201109;2.上海市空间飞行器机构重点实验室,上海201109)
月面机器人具有环境适应性好、工作时间长和安全性高等特点,是未来无人/载人月面探测中的重要支持系统。在分析整理国内外月面机器人探测历史与规划的基础上,梳理月面机器人探测任务需求。结合中国探月工程总体规划和技术水平,提出月球南极、中低纬度和月球背面月面机器人探测的路线图,并从科学价值、工程可行性等方面对各阶段着陆地点进行初选;详细阐述以水冰探测和生物学实验为主要目标的月球南极Shackleton山跨明暗界线探测方案,以及以人机联合探测、大深度地质钻探为特色的中低纬度海陆边界区探测的任务目标和系统方案,可为探月任务的实施提供参考和启示。
月面机器人探测;月球南极;路线图;月球背面;Shackleton撞击坑
1 引言
月面机器人是一种能够在自主、半自主或遥控状态下执行远距离、恶劣环境巡视探测、采样分析、物资搬运、维修维护等科学任务的智能化机器人,具有如下明显特点:①环境适应性好,②工作时间长,③负载能力大,④安全性高,⑤程序化、重复性好等。为控制探月任务风险,在载人登月前,一般将机器人探月作为先导;在载人登月任务中,机器人也是重要的支持系统。
当前月球、火星和小行星探测的主要形式仍然是无人月球车、火星车巡视探测。与此同时,美国[1-5]、日本[6,7]和德国[8,9]已持续开展了数十种新型月面、火表探测机器人的概念研究、演示验证工作。通过对国内外60余种星表机器人的调研分析,梳理月面机器人未来发展的趋势如下:①由单一的机器人探测向多机器人、人机联合探测发展,能够更有效地完成各种探测任务;②由传统的月球车向仿生机器人发展,可以适应复杂地形环境,使科考任务更加灵活、丰富;③由面向平台技术验证向面向探测科学应用发展,适应月球两极、熔洞和永久阴影区环境,以及钻探-取样-分析一体化的机器人是各国研究的重点和方向。
本文基于世界月面机器人探测的历史与规划,梳理月面机器人的任务需求,规划月面机器人探测路线图,设计月球极区和中低纬度月面机器人探测的典型方案。
2 任务需求
在未来月面活动中,为降低航天员作业负荷并提高工作效率,机器人及其团队将广泛深入地参与月面的各项任务。在广泛分析整理国内外月面探测文献基础上将机器人月面任务梳理为如下三类:
1)月面移动:机器人(包括无人巡视机器人、载人月球车、货物运输车等)在平缓月海、崎岖高地、陡峭月坑、曲折熔洞等月面环境,实现从平缓登月地点向月面广大复杂地形区域的持续机动,从而扩大探测的空间范围和地形种类。月面移动类型包括漫游(轮式、履带式和行走)、爬行、水平跳跃、滑行、渡过沙层、翻滚、攀爬及栓系等;
2)月面原位探测:机器人利用其携带的探测工具、科学载荷对各种月面环境现场进行单独/人机联合探测,实现对月面未知信息的获取或已知信息的验证,从而扩展人类对月球的认识。月面原位探测活动包括月面样品采集,样品处理,样品分析,月面探测器安装、调试与维护,月面物理、化学及生物学实验等;
3)月面原位产品生产:机器人利用其携带的工具将月壤、月岩和矿石等月面原位资源加工成适当产品,以降低地球补给的成本和压力。潜在的月面原位生产的产品包括氧、水、混凝土材料、金属(Si,Fe,Al等)、玻璃、陶瓷、挥发气体(CO,He3,N2)等[10]。
根据上述工程需求,将月面机器人任务梳理为远距离巡视探测、采样分析探测、载荷搬运投放、科学实验辅助、设施维修维护、航天员服务支持和设备组装建设等七类。
针对上述任务需求,将月面机器人梳理形成以下三类,如图1。
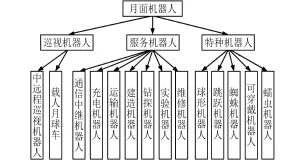
图1 月面机器人分类Fig.1 Classification of lunar surface robots
1)巡视机器人:主要任务是月面环境的巡视勘察,辅以适当的科学考察工作,要求其具有长时间、大范围移动,高精度三维地形成像等功能;
2)服务机器人:主要任务是完成各项科学探测和工程建设工作,其功能可根据任务要求进行配置,主要特点是负载能力强、操作灵活精细等;
3)特种机器人:区别于一般的机器人构型,主要任务是执行极端环境的探测工作,体积小、重量轻,便于携带,配置多样。
3 路线图
3.1 阶段划分
在分析整理世界月球探测历史及未来规划的基础上,考虑中国探月工程的延续性需求和技术发展状况,月面机器人探测计划分为月球极区探测、中低纬度探测与月球背面探测三个阶段,如图2。
第一阶段:2020—2028年,进行月球南极Malapert山和Shanckleton山及其临近永久阴影区的探测,研究极地光照、月壤、月尘、静电与水冰等特性,开展月面原位制氧、制水等试验,并为载人登月准备一定的月面保障条件。月球极区拥有充足的光照时间、特殊的地形条件和地理位置、独特的地体和水冰资源等有利条件。
第二阶段:2028—2036年,进行中低纬度海陆交界区及月面熔洞的探测,研究海陆交界区的地形地质、火山活动、火山熔洞等,开发极端地形机动的特种机器人,实现包括熔洞在内的复杂地形的探测,并为熔洞式月球基地的建设奠定基础。
第三阶段:2036年后,利用月球背面无地球反光、电磁波干扰等优越条件,建立天文观测平台,实现对天全电磁波段的测量。

图2 月面机器人探测路线图Fig.2 Roadmap of robot exploration on lunar surface
3.2 着陆点初选
NASA在已取消的星座计划中确立了月球探测着陆点优选的三条原则[11]:①满足自然科学原理,要求着陆点具有独特的科学研究价值;②存在潜在资源,要求候选着陆点能代表月面可供探索和开发的典型自然资源;③工程操作可行性,要求候选着陆点具备牵牛星及其它月面着陆器能够到达的地形条件。借鉴上述原则,结合我国探月工程的经验积累与技术储备,考虑未来月球基地的远景需求,针对前述的三个探测阶段进行着陆点初选,得到如下五个初选着陆点。
1)Malapert山
月球南极Malapert山,位于南纬85.99°、西经2.93°,距离南极点100余公里[12],海拔5 km。初选理由如下:
(1)科学价值高:位于直径为69 km的 Malapert撞击坑西南段边缘,是研究撞击坑地质的良好地点;山体南面存在局部永久阴影区,便于开展阴影区探测;
(2)光照条件好,一年中89%的时间山顶有全光照,4%有局部光照,便于利用太阳能发电;
(3)通讯条件好,可在山顶建立中继通讯站,提供从月球南极至地球的全天候通信;
(4)山体西侧坡度适宜,存在一条可由轮式车辆翻越、直达峰顶的天然斜坡。
2)Shackleton山
Shackleton山位于月球南极极区,直径21 km,深4.2 km,该环形山西北边缘为南极点,初选理由如下:
(1)科学价值高,Shackleton山西侧边缘A1地点存在相距很近的常年光照区和永久阴影区[13],两者水平距离约为600 m,高程差约为200 m,便于开展跨明暗界线水冰探测[14];
(2)光照条件好,山顶存在多个光照率超过90%的常年光照区;
(3)着陆条件好,A1地点附近存在一条水平宽度约为200 m的狭长地带,适合进行高精度定点登陆;
(4)坑底的永久阴影区常年低温(约40 K),不受地球电磁信号干扰,便于开展高精度天文观测。
3)史密斯海
月球正面史密斯海(北纬1.7°、东经85.5°),处于海陆交界处[15],初选理由如下:
(1)科学价值高:附近分布有大量年轻火山熔岩(年龄10~20亿年),且存在重力异常(质量瘤),便于开展大深度地质钻探研究;
(2)海陆交界处地貌、地质类型丰富,地层时代跨度较大,可进行多样化的采样探测;
(3)着陆条件好,周边存在多处平坦区域;
(4)资源丰富,月壤富铁,便于开展原位资源利用。
4)Marius丘陵
Marius丘陵(北纬14°、西经55°),位于月球正面赤道附近,附近存在“月面熔洞”[16],初选理由如下:
(1)科学价值高:月球熔洞是月面下熔岩流在特定条件下气化挥发后的管状洞穴,人类尚未对其开展过近距离探测;
(2)熔洞内温度恒定(约-20℃),无沙尘,可有效地防止微陨星雨、各种辐射危害,是未来载人月球基地的优选地址之一;
(3)熔洞内空间大,日本的“月亮女神”号月球探测器拍摄的图片显示[17],该熔洞可以容纳整座白宫;
(4)着陆条件好,附近局部地形较平坦。
5)代达罗斯坑
代达罗斯坑,位于月球背面中心区域,直径100 km[18],初选理由如下:
(1)月球背面可以有效避开来自地球的干扰信号,便于开展射电、甚低频天文观测和特殊科学实验;
(2)代达罗斯坑周边存在高耸山脊,可以有效阻隔来自月球轨道卫星的干扰噪声,未来可在此利用环形山地形建立一个口径达到100 km的固定碗形望远镜,开展对宇宙深处的高精度探测。
4 典型方案
在上述5个初选着陆点中,月球背面探测及天文观测平台建立因工程巨大可作为远期规划,月球极地Shackleton山跨明暗界线探测和中低纬度海陆边界区探测因相对较高的科学价值和工程可实现性而成为优先选择。接下来详细阐述以水冰探测和生物学实验为主要目标的月球南极Shackleton山跨明暗界线探测方案,以及以人机联合探测、大深度地质钻探为特色的中低纬度海陆边界区探测的任务目标和系统方案。
4.1 南极Shackleton山探测
优选Shackleton山西侧边缘为着陆地点,探测任务主要包括:
(1)建立跨明暗界线光能传输系统,在Shanckleton撞击坑永久阴影区中光斑区域建立温暖、低辐射环境(18~26℃)[13];
(2)在永久阴影区温暖、低辐射环境,进行小型密闭的生物实验;
(3)探测Shanckleton撞击坑永久阴影区水冰;
(4)开展常年光照区至永久阴影区巡视探测;
(5)开展原位月壤制氧实验;
(6)开展原位制造月面建筑材料的试验;
(7)建立月球南极太阳能电站,为后续的探测提供能源保障。
典型探测方案如图3,左上方为常年光照区,其中设有可沿竖直轴360°旋转的太阳能发电装置和光能反射装置,太阳能发电装置安装在静止的着陆器上,光能反射装置安装在一个具有一定移动能力的平台上,可以进行小范围机动而选取最优的反光地点,将光能传输至永久阴影区的预定位置;右下方为永久阴影区中被照亮的光斑区域,其中设有安装在移动平台上的科学实验室,可用于水冰钻探取样与原位分析,以及月面生物学实验。系统配置如下:
(1)一个跨明暗界线光能传输装置:将常年光照区的太阳能定向传输至永久阴影区的目标区域,同时为永久阴影区的设施提供通讯中继;应用二块可绕水平轴和竖直轴偏转的反光镜将来自不同方位的太阳光经过二次反射而传输至同一个目标区域;

图3 月球南极跨明暗界线的探测方案Fig.3 Lunar pole exploration between HIR and PSR
(2)一座太阳能发电站:通过电缆向水冰探测机器人供电,可为先期建成,或由本次任务的着陆器兼任;
(3)一个水冰探测机器人:要求具有较强的爬坡越障及脱困能力,携带钻取机械臂与原位分析实验包等有效载荷,可进行原位水冰钻探、采样和原位分析;在连接太阳能发电站的承力电缆的辅助下水冰探侧机器人携带科学实验室自行移动至永久阴影区,承力电缆具有传输电能和约束牵引水冰探测机器人双重功能;
(5)一个生物科学实验包:其中包含低等植物(如藻类)、种子、微生物及小动物(如跳蚤)等生物的密闭自循环微型生态系统,由水冰探侧机器人携带至永久阴影区中由光能传输装置照亮的光斑区域,验证生物在改造后永久阴影区温暖、低辐射环境中(18~26℃)的适应性。
4.2 中低纬海陆交接处探测
优选史密斯海(北纬1.7°、东经85.5°)为着陆地点,探测任务主要包括:
(1)实现月面人机协同行走、探测;
(2)开展大深度地质钻探,获取火山熔岩或质量瘤区域深层的岩芯样本;
(3)投放、安装月震仪、无线电信标、热流探针和激光反射器等仪器;
(4)航天员驾驶载人车实现十公里量级的月面机动;
(5)利用小型跳跃机器人探测极端地形区域。
人机联合探测系统配置如表1所示。

表1 人机联合探测系统配置Table 1 System configuration of human-robot exploration
人机联合探测过程如图4所示,典型步骤如下:
1)随车搜索阶段
为寻找理想的探测/采样点,在较平坦的待探测月面将两台机器人放下,机器人和月球车以特定的队形分别从不同方向进行搜索,机器人将所得视频及其它数据实时传输至载人月球车供航天员分析,以提高搜索效率。

图4 月面人机联合探测全过程主要探测模式及任务Fig.4 Main tasks and exploration modes of human-robot exploration’s process
2)人机联合行走阶段
在月面复杂地形环境下,机器人自主导航移动速度很慢而难以跟上航天员的步伐,需要充分借助航天员的灵敏视觉和高级思维进行现场路径规划,根据具体实施方案不同产生如下两种工作模式:
(1)跟随模式:航天员实时规划便于机器人和自身行走的路径并在队伍前方领路,机器人通过识别航天员背部的定位信号而直接解算出跟随路径,因而无需自主分析规划路径而大大提高机器人的行走速度,如图5。
(2)遥控模式:由于局部避障或特殊路段行走需要,航天员通过基于人体手臂神经肌肉特点的可穿戴控制设备近距离控制机器人按指定路径行走;或通过激光笔照射间接指示机器人的行走路径。
3)人机联合探测阶段
在航天员及普通机器人难以进入的月面区域,启动单次跳跃高度可达3~5 m的跳跃机器人,在航天员的现场实时操作下执行跳跃运动抵达较陡的山坡或凹坑,近距离拍摄照片,并通过其携带的小型采样器对具有潜在研究价值的小型样本采样并带回。或者航天员携带蠕虫机器人,钻入月面以下进行采样返回。
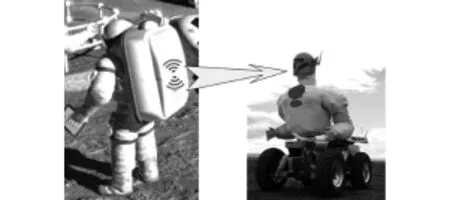
图5 人机联合行走中“跟随模式”示意图[19]Fig.5 Following mode of human-robot walking[19]
4)人机联合钻探阶段
在海陆边界区具有适当地质结构的地点(如质量瘤),为获取深层月壤/岩心样本,进行人机联合钻探。
月球表面的低引力环境导致月面钻探任务变得艰难,为获得尽可能大的竖直向下的钻进力,需要借助各种可用的重物资源,并采用特殊的固定措施,如将钻探机器人通过带地楔的斜拉索固定在月面上,并在航天员的辅助下完成相关钻探机器人的定位、安装和调试,并进行试钻。在航天员离开后,钻探机器人持续工作直至钻达预期深度,并取出、封装样本。
5)危机处置阶段
当航天员在远离月球车的地方意外失去行走能力时,两台机器人进入机器人组合救援模式,如紧急抛弃载荷并连接成一个便于平放航天员的移动平台,在另一名航天员的引导下完成伤员运输任务,如图6所示。

图6 机器人组合救援模式示意图[20]Fig.6 Rescuing mode of human-robot exploration[20]
5 结论
1)梳理了月面移动、月面原位探测、月面原位生产三大类,以及远距离巡视探测、采样分析探测、科学实验辅助、航天员服务支持和设备组装建设等七小类月面机器人探测的任务需求;
2)提出了月球南极、中低纬度和月球背面三阶段月面机器人探测路线图,阐述了各阶段的主要任务,并从科学价值、工程可行性等方面开展了着陆地点初选;
3)设计了以水冰探测和生物学实验为主要目标的月球南极Shackleton山跨明暗界线探测,以及以人机联合探测和大深度地质钻探为特色的中低纬度海陆边界区探测方案。
(
)
[1]Hua H,Mrozinski J,Shelton K,et al.Analyzing lunar mission architectures using an activity planner for optimizing lunar surface human-robot operations[C]//Conference on System Engineering Research,Los Angeles,CA.2008.
[2]Lawrence C.Greer,Michael J.Krasowski,Norman F.Prokop.Cratos:the evolution of a robotic vehicle[R].NASA/TM-2013-216491,2013.
[3]Cham J,Bailey S,Clark J,et al.Fast and robust:Hexahedral robots via shape deposition manufacturing[J].International Journal of Robotics Research,2002,21(10-11):869-882.
[4]Crandall J W,Goodrich M A,Olsen Jr D R,et al.Validating human-robot interaction schemes in multitasking environments[J].Systems,Man and Cybernetics,Part A:Systems and Humans,IEEE Transactions on,2005,35(4):438-449.
[5]Zakrajsek J J,McKissock D B,Woytach J M,et al.Exploration rover concepts and development challenges[C]//1st Space Exploration Conference:Continuing the Voyage of Discovery.2005:1-23.
[6]Aoki T,Murayama Y,Hirose S.Development of a transformable three-wheeled Lunar rover:Tri-Star IV[J].Journal of Field Robotics,2014,31(1):206-223.
[7]Rohmer E,Reina G,Yoshida K.Dynamic simulation-based action planner for a reconfigurable hybrid leg-wheel planetary exploration rover[J].Advanced Robotics,2010,24(8-9):1219-1238.
[8]Cordes F,Ahrns I,Bartsch S,et al.LUNARES:lunar crater exploration with heterogeneous multi robot systems[J].Intelligent Service Robotics,2011,4(1):61-89.
[9]Cordes F,Dettmann A,Kirchner F.Locomotion mode control for a hybrid wheeled-leg planetary rover[C]//Proceedings of the IEEE International Conference on Robotics and Biomemetics(IEEE-Robio 2011),Phuket,Thailand.2011.
[10]Space Technology Roadmaps:The Future Brought To You By NASA[EB/OL].(2013-12-13)[2014-07-01].http://www.nasa.gov/offices/oct/home/roadmaps/index.html.
[11]Frank Sletzen Jr.Home on the Moon[J].Aerospace America,2007,45(7):28-33.
[12]Fincannon H J.Lunar polar illumination for power analysis [C]//AIAA 6th International Energy Conversion Engineering Conference(IECEC),2008.
[13]Bryant S.Lunar pole illumination and communications maps computed from GSSR elevation data[C]//Aerospace conference,2009 IEEE.IEEE,2009:1-19.
[14]Zeng Lingbin,Xiao Jie,Tang Ping,Shao Jiming,et al.Conceptual Design of a Lunar Pole Surface Exploration System between Highly Illuminated Region and Permanently Shadowed Region[C]//65rd International Astronautical Congress,Toronto,Canada,Oct 3-6,2014.
[15]欧阳自远.月球科学概论[M].北京:中国宇航出版社,2005:330.OUYANG Ziyuan.Introduction to Lunar Science[M].Beijing:China Astronautic Publishing House,2005:330.(in Chinese).
[16]欧阳自远.月球科学概论[M].北京:中国宇航出版社,2005:346.OUYANG Ziyuan.Introduction to Lunar Science[M].Beijing:China Astronautic Publishing House,2005:346.(in Chinese).
[17]Junichi Haruyama,Kazuyuki Hioki,MotomaroShirao,et al.Possible lunar lava tube skylight observed by SELENE cameras[J].Geophysical Research Letters,2009,36,(21): 206-211.
[18]Wikipedia:Daedalus(crater)[EB/OL].(2014)[2014].http://en.wikipedia.org/wiki/Daedalus_(crater).
[19]ThangveluM,Bidwell.J.,Cheng,J.,et al.Return to the Moon:Jules Verne Project[C]//AIAA SPACE 2007 Conference&Exposition,18-20 September,2007,Long Beach,California.
[20]Malenkov M,Maurette M,Koutcherenco V,et al.Innovative Mars Exploration Rover Using Inflatable or Unfolding Wheels [C]//Proceedings of the 9th ESA Workshop on Advanced Space Technologies for Robotics and Automation,Noordwijk,The Netherlands,2006:1-8.
Research on the Roadmap and Typical Scenarios of Lunar Surface Robot Exploration
ZENG Lingbin1,2,QIU Baogui1,2,XIAO Jie1,2,SHAO Jiming1,2,LI Baojiang1,2,YE Liang1,2
(1.Shanghai Institute of Aerospace Systems Engineering,Shanghai 201109,China;2.Shanghai Key Laboratory of Spacecraft Mechanism,Shanghai 201109,China)
Compared to expensive manned lunar exploration,robot exploration can carry out more sorts of works safely and consistently,such as roving exploration,in-situ sampling,maintenance,and carrying heavy cargoes,et al.After analyzing foreign countries’histories and future plans of lunar surface robot exploration,three trends are summered up,and seven requirements are classified.Three phases of lunar South Pole exploration,middle-low latitude exploration and lunar far-side exploration are proposed based on our country’s lunar exploration overall planning and aero-space technique level,and landing sites are primarily selected from the views of scientific value and engineering feasibility.At last,requirements analyzing and scenarios designs of Shackleton mountain exploration and middle-low latitude exploration are detailed,which can be used to as proposals for our country’s future lunar surface exploration.
lunar surface robot exploration;lunar South Pole;roadmap;lunar far-side;Shackleton crater
V476.3
A
1674-5825(2015)03-0263-07
2014-7-01;
2014-9-15
曾令斌(1983-),男,博士,工程师,研究方向为月面活动系统、空间结构在轨组装技术。E-mail:zlblb@126.com.
