船用异步电机SVPWM调制技术的研究
2015-12-07陈新亚
陈 震,陈新亚
(1.河南机电高等专科学校 电子通信工程系,河南 新乡453000;2.河南机电高等专科学校 机电工程系,河南 新乡453000)
0 引 言
船舶推进主要依靠推进电动机提供推进动力,带动船舶向前行驶。船舶电动机与普通电动机相比,一般要求具有高可靠性、大容量、较大的低速转矩、较好的可控性、较高的节能效果、较小的震动和噪声等特性。其中异步电动机,又称为感应电动机,具有低速时转矩高,高速时效率高,结构简单,维护方便,小型高可靠性等优点,比较适合应用于船舶推进系统。
在众多的电机调制技术中,SVPWM调制技术,即空间矢量脉宽调制技术,能明显减小电机的谐波损耗,降低脉动转矩,且其控制简单,数字化实现方便,能够满足船舶异步电机调节控制的要求,本文对船用异步电机SVPWM调制技术进行研究。
1 SVPWM的调制原理
SVPWM调制技术是功率管发波方式的一种,它把三相逆变器里的6个开关管的开通状态和关断状态进行排列组合从而产生PWM 波,最终使得逆变电路输出的三相电压尽量地接近于正弦波。首先运用电路传感器采用船舶异步电动机三相定子中的定子电流,从而构成电流控制闭环,然后把所有的基本电压空间矢量进行组合合成需要的任何一个瞬时的非基本电压矢量,最后可以获得一个定子磁链矢量末端的最终轨迹,从而实现对船舶异步电动机的完美控制[1]。
SVPWM的基本思想是运用平均值进行等效,以8个基本空间电压矢量为基本成员,然后合成所有其他的目标空间电压矢量,即在某个调制时间里把某一给定的电压矢量邻近的2个非零的基本空间电压矢量和零矢量的作用时间进行作用,从而使得它们的平均值与所需要合成的目前空间电压矢量相等。其中,非常关键的是,它们的非零基本电压矢量分配的时间不能一次全部供给,而应该分多次供给,实现的具体措施为插入许多的零空间矢量,最终精确地实现对所有的目标矢量的合成,最终使得所要合成的矢量末端进行360°旋转后,轨迹几乎为一个完美的圆形。通过比较器把实际的矢量轨迹曲线与标准的圆形进行比较,从而形成开关器件的脉冲宽度调制信号,最终控制逆变器中功率器件的开关状态实现对电能的变换。
假设来自船舶电网的三相交流电进过整流滤波之后的直流电压为Udc,逆变模块最终输出的三相电压矢量分别是UA(t),UB(t),UC(t),这3个矢量在相位上相差120°。如果每相电压的瞬时量为Um,逆变器输出的三相交流电的频率为f,那么船舶异步电动机中三相定子上的电压方程可表示如下:

其中θ=2πft,将UA(t),UB(t),UC(t)这3个电压进行合成,合成矢量称之为U(t),则有:

本文的船舶异步电机SVPWM调制系统中,一个开关周期内非零电压U1~U6仅可以施加1 次,每相差60°实现1 次换相,改变其工作状态。静止的二维坐标系中8个基本的非零电压矢量在空间上的分布情况如图1所示。整个平面被分成6个区域,依次相差60° ,U0和U7处在原点的位置上。如果每个区域中只供给2 种功率开关器件的工作状态,那么合成之后的电压矢量末端得到的轨迹几乎为1个正六边形。如果要让输出的矢量轨迹形成更接近于1个圆形,在进行船舶异步电动机的开发过程中,就要尽量把功率开关管的工作频率加大[2]。
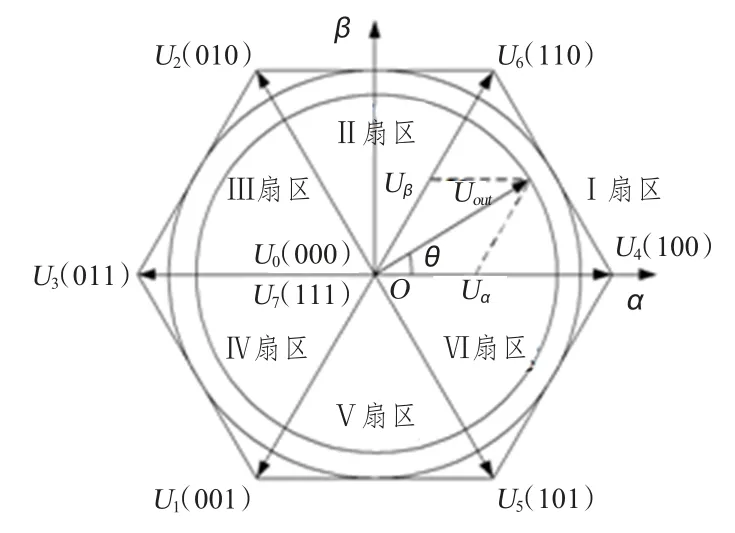
图1 静止的二维坐标系中的基本矢量分布情况Fig.1 Spatial location of eight basic voltage vector in stationary two dimensional coordinate system
2 SVPWM 算法的推导
需要合成的瞬时电压矢量的每一个小的增角为:

其中,ω为所需要合成的空间矢量的旋转角速度;T为船舶异步电动机的空间电压矢量转动一圈要消耗的时间(T = 1/f)。为了更加清楚地介绍矢量合成情况,我们作如下详细分析:
在静止的二维坐标系里(见图1),Uref为目标合成矢量,它处在Ⅰ号区域中,Uref和U4两个矢量之间的角度相差θ,现在我们使用U4,U6,U0和U7等非零空间矢量来合成,获得如下方程式:

利用正弦分解的方法,α 轴可以列出如下方程:

β 轴可以列出如下方程:

零基本空间矢量的作用时间的计算公式为:

零空间电压矢量的巧妙和随机插入使用是极其关键的一个问题,它可以把功率器件的开通和关断的次数降到最大,从而把功率器件的开通能量损失以及关断能量损失最大限度地减少。一旦负载电磁力矩非常大,那么功率器件中通过的电流也会非常大,这个时候绝对不能把功率器件的开关状态进行改变。合成空间矢量跟钟表一样以某一个速度在匀速转动,旋转一圈后就会得到很多电压向量,他们的模值都一样,但每个向量的空间位置不相同[3]。
必须依据实际情况把零矢量进行大量的插入才可以把U1,U2,U4以及U3,U5,U6这3个矢量的模值进行改变,所以如果要让三相逆变模块输出的波形尽量对称,那么在不同区间里功率器件的开关状态的切换顺序就不能一样。当所需要合成的空间电压矢量URE处在Ⅰ号区域中的时候,此时它的相位角范围为0°≤θ ≤60°,接着合成矢量Uref会按照次序到达Ⅱ号、Ⅲ、Ⅵ号区域,然后继续进行下一次的循环。
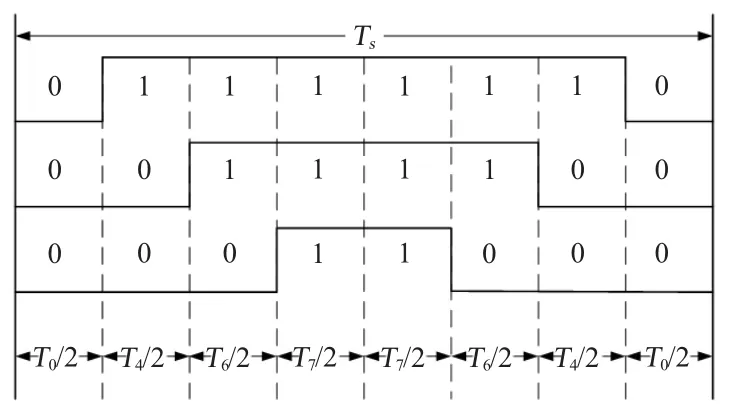
图2 Ⅰ号区域里上桥臂3个功率管的PWM 波形Fig.2 The PWM waveform of the three power tube of in upper arm No.Ⅰregion
合成电压矢量UREF 位于不同的扇区区域时,其功率管的开关状态的切换顺序和上桥臂的3个PWM 波形如图2所示。实际调试结果显示,SVPWM 可以实现对船舶异步电动机的非常理想的控制,它可以产生非常对称的脉冲宽度调制波形,并且含有的谐波分量很少。在每个工作时间内只进行了6 次功率器件的开关切换,能量损失大大降低[4]。
3 SVPWM的实现过程
要实现SVPWM 算法对船用异步电动机的控制,必须确定合成矢量Uref所处于的区域,因为合成Uref根据Uα和Uβ确定,则有:

如果u1>0,则A = 1;如果u2>0,则B = 1;如果u3>0,则C = 1。
最终要合成的空间电压矢量所在的区域的计算公式是:

为了直接计算出非零基本矢量的分配时间,在静止的二维静止坐标系中,通过把Uα和Uβ参与进去就可以把复杂的运算变成简单的过程。同理,可以计算出其他区域中合成矢量Uref的分配时间[5]。
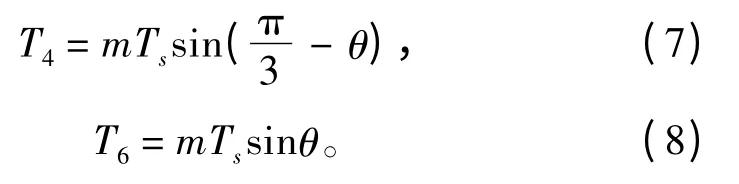
基本矢量T6以及T4的分配时间计算公式为:
零空间电压矢量T0以及T7的分配时间计算公式为:

Uref在Ⅱ号区域里,非零矢量T2和T6的分配时间计算公式为:
Uref在Ⅲ号区域里,非零矢量T2和T3的分配时间计算公式为:

Uref位于Ⅳ号区域里,非零矢量T1和T3的分配时间计算公式为:
Uref在Ⅳ号区域里,非零矢量T1和T5的分配时间计算公式为:
Uref在Ⅵ号区域里,非零矢量T4和T5的分配时间计算公式为:
在实际应用中,船舶异步电动机常以高速的处理器芯片作为承载SVPWM 算法。假设时钟频率为fosc,处理器输出的PWM的频率为fs。那么,计数的初始大小为:

此外,假设脉冲宽度调制的信号系数为Ksvpwm,于是

如果Uref在I 号区域中时,相邻非零基本矢量的分配时间计算公式是:
如果Uref在Ⅱ号区域中时,相邻非零基本矢量的分配时间计算公式是:

如果Uref在Ⅲ号区域中时,相邻非零基本矢量的分配时间计算公式是:

如果Uref在Ⅳ号区域中时,相邻非零基本矢量的分配时间计算公式是:
如果Uref在Ⅴ号区域中时,相邻非零基本矢量的分配时间计算公式是:

如果Uref在Ⅵ号区域中时,相邻非零基本矢量的分配时间计算公式是:
在Uref的区域和对应的基本矢量以及零矢量的分配时间都确定后,接下来就需要确定PWM的发波方式。规定3个比较器的计数初值依次是Ntaon,Ntbon以及Ntcon。如果使用倒转过来的三角,则有:
同理,当使用正的三角,则有:
根据以上分析和计算,基于 Matlab 中的simulink 功能,搭建SVPWM的模型,模型如图3所示。
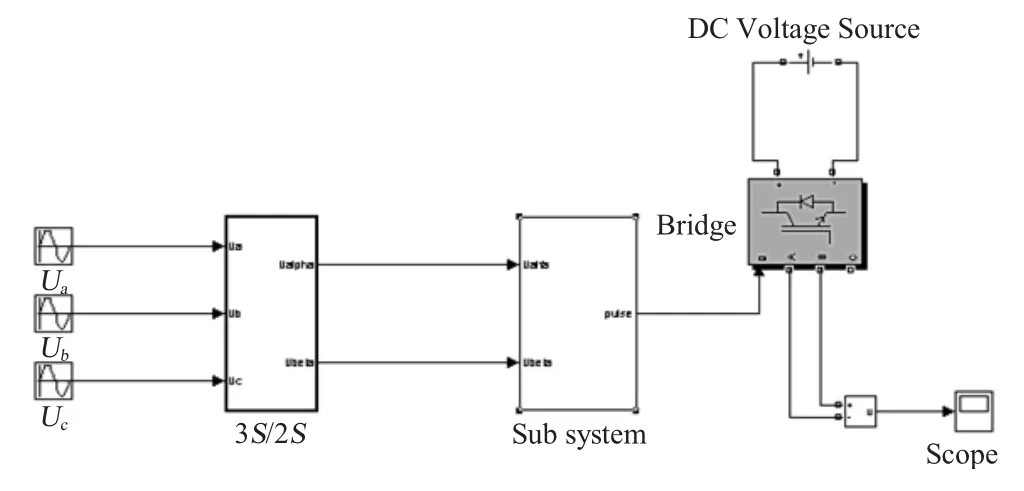
图3 SVPWM的仿真模型Fig.3 Simulation model of SVPWM
4 仿真结果及分析
参数设定情况如下:船舶电网三相交流电压Ua,Ub,Uc频率设定为60π,幅值设定为173 V,3个电压的相位依次相差120°;采样周期和高频载波的周期都设置为0.000 2 s;直流侧的直流电压是300 V。仿真结果如图4所示。
仿真结果表明此算法具有明显的优越性,可大大提高船用异步电动机的性能。
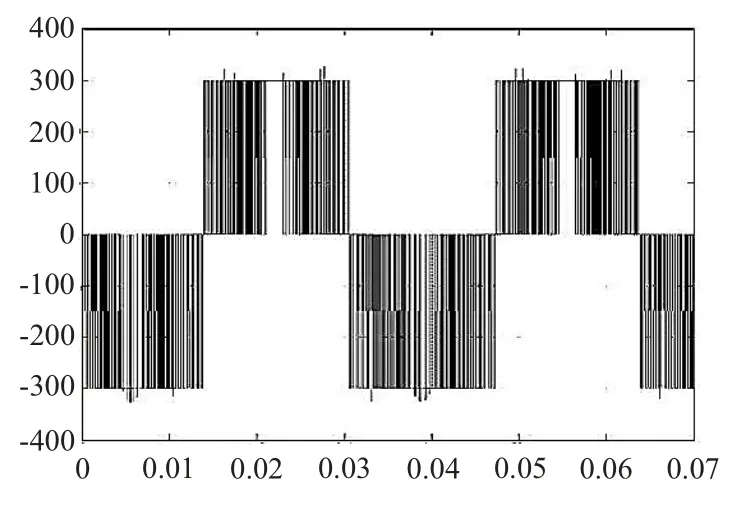
图4 逆变器输出的线电压uabFig.4 Line voltage uab of inverter
5 结 语
为了更好地利用逆变器直流侧的直流电压、提高对船舶电网电能的利用率、实现对船舶异步电动机更好地控制,本文提出了一种用于船舶异步电动机的SVPWM 算法。它的优势包括容易实现,不需要复杂的理论推导,能够输出稳定电磁转矩,脉动比较小。仿真结果表明此算法具有明显的优越性,可大大提高船用异步电动机的性能。
[1]谭斌.基于DSP的异步电机SVPWM 矢量控制系统研究与实现[D].西安:长安大学,2013.
[2]郭宝宁.基于dSPACE的船用异步电机矢量控制研究[J].舰船科学技术,2015,37(2):144-147.GUO Bao-ning.Research of vector control for induction motor of the ship based on Dspace[J].Ship Science and Technology,2015,37(2):144-147.
[3]李夙.异步电动机直接转矩控制[M].北京:机械工业出版社,1999.
[4]闫智辉,李志远.异步电机直接转矩控制技术在随动系统中的应用[J].舰船科学技术,2007,29(S1):50-52.YAN Zhi-hui,LI Zhi-yuan.Application of technique asynchronous electromotor controlled by direct torque in a following-up control system [J].Ship Science and Technology,2007,29(S1):50-52.
[5]方俊初,凌有铸.SVPWM调制异步电机矢量控制系统的原理与仿真[J].电气传动,2006,25(9):54-56.FANG Jun-chu,LING You-zhu.Simulation of the vector control system with SVPWM for asynchronous motors[J].Electrical Drives,2006,25(9):54-56.