基于Simulink的开关磁阻电机直接转矩控制的研究
2015-12-05梅柏衫孟悦然刘东阳
梅柏衫,孟悦然,刘东阳,高 宁
(上海电力学院 电气工程学院,上海 200090)
基于Simulink的开关磁阻电机直接转矩控制的研究
梅柏衫,孟悦然,刘东阳,高 宁
(上海电力学院 电气工程学院,上海 200090)
由于具有特殊的工作原理,开关磁阻电机在常规的控制方式下会产生很大的转矩脉动,限制了其应用范围。针对这一问题,对开关磁阻电机的直接转矩控制进行了研究,并在MATLAB/Simulink环境下搭建了8/6级开关磁阻电机直接转矩系统仿真模型。结果表明:应用直接转矩控制开关磁阻电机,运行时的转矩脉动明显减小,拥有良好的调速性能和转矩动态响应。
开关磁阻电机;直接转矩控制;转矩脉动;Simulink
0 引言
开关磁阻电机具有结构简单、成本低、调速范围广等特点,近年来引起了国内外学者的广泛关注。开关磁阻电机调速系统的发展从20世纪80年代起步,由于其研究历史尚短,又涉及到电力电子、电机学、控制理论等多个学科领域[1],且开关磁阻电机具有复杂的非线性特性,对其深入研究仍具有很大困难。从目前的国内外发展水平来看,无论在理论上还是在应用上都存在不少问题,有待于进一步的研究与完善。
直接转矩控制已经很好地应用于异步电机控制系统当中,体现了简单实用,动态响应快的优点,大大优于传统的控制方法。本文基于Simulink对开关磁阻电机直接转矩控制进行了研究。
1 开关磁阻电机直接转矩控制原理
1.1 开关磁阻电机磁链与转矩特性
电机一相基本电压方程为:

(1)
其中:Ψk为第k相磁链;ik为第k相电流;Rk为第k相电阻。
在开关磁阻电机中,定子电阻很小,则式(1)可简化为:
(2)
由公式(2)看出,通过选择合适的定子电压矢量可以改变定子磁链,使定子磁链幅值恒定[2],达到直接转矩控制的目标。
由开关磁阻电机每相的电压方程及转矩理论可知,在某一时刻,电流视为恒定值,则开关磁阻电机的转矩T可描述为:
(3)
其中:Ψ(θ,i)为定子绕组相磁链;θ为转子位置角。
相绕组是单级性驱动的,所以开关磁阻电机每相电流都是正向电流,转矩的正负主要取决于磁链偏导的符号[3]。由式(3)可以看出,开关磁阻电机在保持定子磁链幅值不变的情况下,当定子磁链超前于θ时,电机转矩增大;定子磁链滞后于θ时,电机转矩减小。
1.2 直接转矩控制原理
直接转矩的控制思想是将转矩作为直接控制的对象,通过实时转矩与给定转矩的比较,输出调整的电压信号,把转矩限定在一个滞环宽度内,从而达到控制电机的目的[4]。
开关磁阻电机的直接转矩控制通常采用软开关的功率变换模式,根据开关管的通断状态,在此模式下开关磁阻电机的任意一相的功率变换电路都具备3种状态[5],如图1所示。

图1 功率变换器开关状态
对于四相的开关磁阻电机,每相绕组电压矢量有3种状态可以选择,那么总共就有34即81种状态,而实际的电压矢量只需8个即可。同时,在电机的实际运行过程中,电压矢量的选择也有一定的约束条件。具体的矢量分布图如图2所示,一共8个电压矢量,位于各个扇区的中心。

图2 四相电压矢量与扇区分布图
图3为磁链矢量位于k区的情况。由图3可知,当定子磁链在区域k中,Uk+1能够使磁链幅值增加并且使转矩增大,Uk-1能够使磁链幅值增加并且使转矩减小。通过Uk+2使转矩增加而不改变磁链幅值[6]。
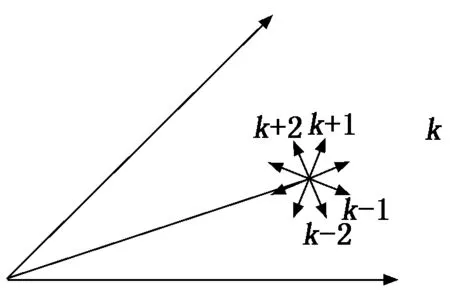
图3 磁链矢量位于k区的情况
综上所述,通过合理选择加在电机定子绕组上的电压空间矢量就可以调节电机的磁链和转矩,将所有扇区中转矩磁链和电压矢量的关系列出来,就得到了直接转矩控制的矢量表,如表1所示。
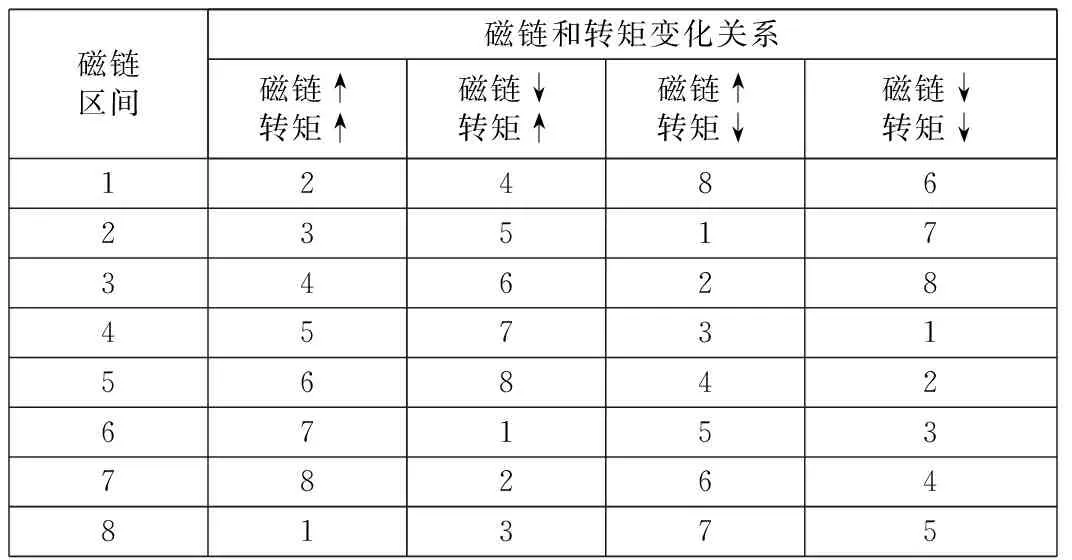
表1 四相开关磁阻电机矢量开关表
2 模型搭建
直接转矩控制结构拓扑图如图4所示,包括变流器模块、磁链计算模块、开关表模块、滞环模型、开关磁阻电机。图4中,T*和Ψ*分别为转矩和磁链的参考值,由转速反馈经过PI调节器计算出。
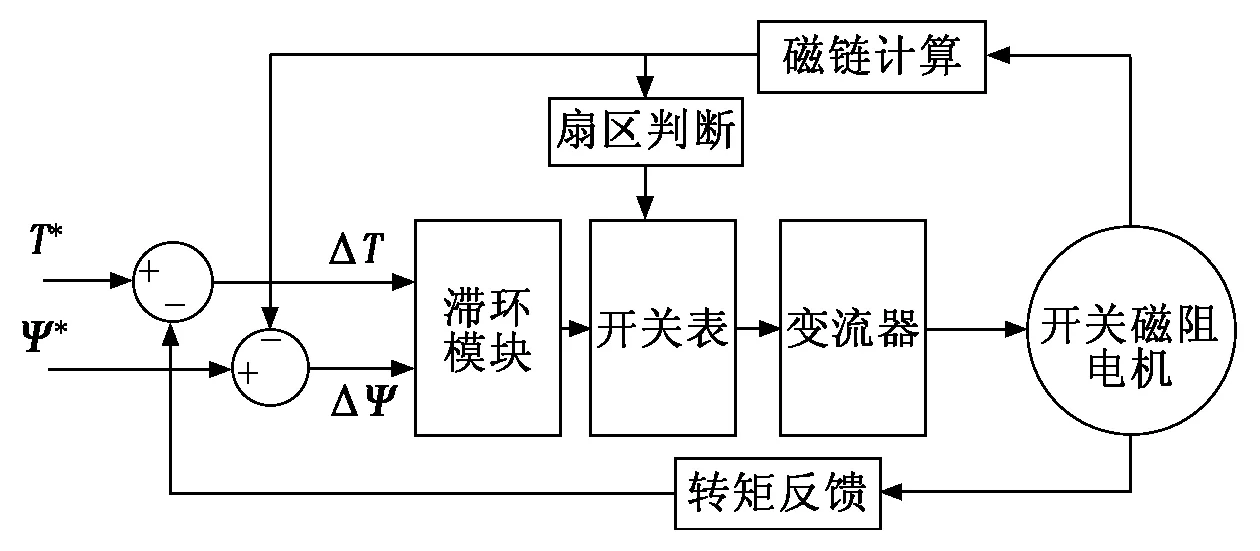
图4 直接转矩控制结构拓扑图
功率变换器是利用Simulink模块中提供的基本开关模块搭建封装,本系统采用不对称半桥回路。磁链计算模块将四相磁链进行坐标变换,变换到静止坐标系α-β上,并计算出磁链的幅值和相角。滞环模块根据转矩和磁链反馈量与参考量的差值,判断出磁链和转矩的变化需求。开关表根据磁链和转矩变化的需要,结合磁链所在的扇区,计算出响应的电压矢量。
3 仿真结果与分析
为验证本文所研究内容,在MATLAB/Simulink环境下搭建了开关磁阻电机直接转矩控制系统,四相开关磁阻电机参数为:定子电阻Rs=0.01 Ω,转动惯量J=0.004 kg·m3,摩擦因数f=0.01,最大磁链0.36 Wb。
(1) 在直接转矩调速系统中,给定负载转矩为T=0 Nm,即空载运行,给定转速为n=1 500 r/min,实验结果如图5所示。稳定之后的转矩响应图如图6所示。两种控制方式的磁链响应图如图7所示。
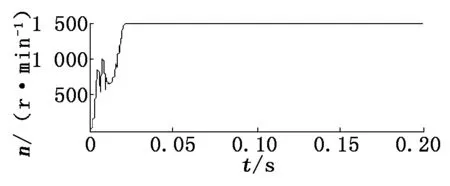
图5 直接转矩控制下转速响应
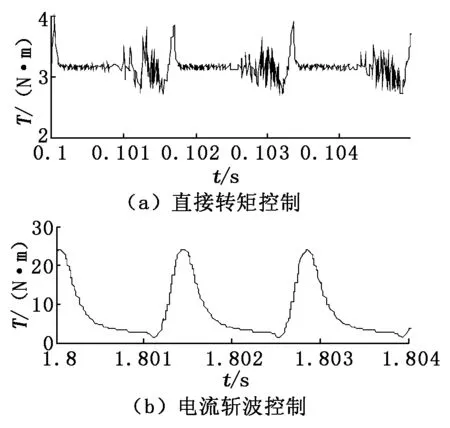
图6 转矩输出比较图

图7 磁链输出比较图
如图5~图7所示:直接转矩控制下的开关磁阻电机,启动到转速到达额定值的时间为0.02 s,启动时间短;启动之后转速基本稳定在给定转速;与电流斩波控制相比,转矩的脉动有明显的减小;相比于电流斩波控制下的输出磁链,直接转矩控制系统输出磁链轨迹为一个圆形,磁链的幅值被限定在滞环宽度内,实现了定子磁链幅值基本恒定。
(2) 其他参数不变的情况下,给定负载转矩在0.2 s时阶跃为20 Nm,在0.4 s时恢复为零。仿真结果如图8、图9所示。
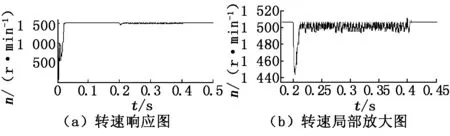
图8 负载突变情况下转速响应图
由图8可以看出,在转矩波动的情况下,转速并未出现剧烈波动,将突变的部位放大可以看出,响应时间约为0.03 s,说明系统在负载突变的情况下,能够快速响应,满足系统对稳定性和快速性的要求。
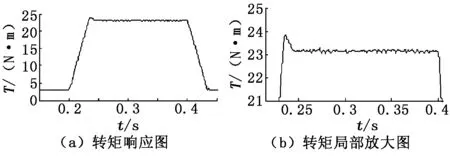
图9 负载突变转矩响应图
4 结论
直接转矩控制思想是通过选择合适的电压矢量将磁链和转矩限制在一个合适的滞环内,相比传统的电流斩波控制和角度位置控制,它具有响应速度快、动态性能好的优点。本文在MATLAB/Simulink环境下搭建了模型对开关磁阻电机直接转矩控制进行了仿真,验证了其有效性和正确性。
[1] 王宏华.开关型磁阻电动机调速控制技术[M].北京:机械工业出版社,1999.
[2] 宋桂英,孙鹤旭,郑易,等.开关磁阻电动机直接转矩控制的研究[J].电气传动,2004,34(5):9-11.
[3] 邓木生,瞿遂春,李华柏.开关磁阻电机基于转矩脉动最小化的直接转矩控制技术[J].现代电子技术,2011,34(16):207-210.
[4] Soares F,Costa Branco P J. Simulation of a 6/4 switched reluctance motor based on Matlab/Simulink environment[J].IEEE Transactions on Aerospace and Electronic Systems,2001,37(3):989-1009.
[5] 吴建华.开关磁阻电机设计与应用[M].北京:机械工业出版社,1999.
[6] 王勉华,梁媛媛,宋景哲,等.直接转矩控制在开关磁阻电机中的应用与研究[J].电机与控制应用,2008,35(2):25-28.
Study on Direct Torque Control of Switched Reluctance Motor Based on Simulink
MEI Bo-shan, MENG Yue-ran, LIU Dong-yang, GAO Ning
(Shanghai University of Electric Power, Shanghai 200090, China)
Due to the special principles of switched reluctance motor(SRM), it will produce large torque ripple when it is controlled by traditional control methods, which limits the applications of SRM. In order to solve this problem, the direct torque control of SRM is studied. The simulation model of the direct torque control system for 8/6 switched reluctance motor is set up is MATLAB/Simulink. The simulation results show that the torque ripple of the switched reluctance motor by direct torque control is significantly reduced, the motor has good speed performance and torque dynamic response.
switch reluctance motor; direct touque control; touque ripple; Simulink
1672- 6413(2015)06- 0158- 03
2015- 07- 27;
2015- 10- 10
梅柏杉(1957-),男,湖南湘潭人,硕士生导师,教授,本科,研究方向:电力传动,智能电网风力储能。
TM352∶TP391.7
A
