基于ADAMS的人体步态运动仿真
2015-12-05戴士杰
杨 楠,戴士杰,2
基于ADAMS的人体步态运动仿真
杨 楠1,戴士杰1,2
(1.河北工业大学 机械工程学院,天津 300130;2.哈尔滨工业大学 机器人与系统国家重点实验室,黑龙江 哈尔滨 150080)
通过对人体结构和运动的分析,使用SolidWorks建立人体的模型。将模型导入到ADAMS软件后,实现步态的运动学和动力学的仿真,得到人体大腿、小腿质心的运动轨迹曲线以及足底压力的变化曲线,为研究步态识别和仿人科学提供理论基础。
人体模型;ADAMS;步态;仿真
0 引言
步态是人最基本的运动形式之一,对人体进行建模和步态仿真在机器人、康复工程、步态识别等学科领域具有重要的意义[1]。国内外很多研究机构都以人为研究对象,并对其进行建模和仿真,这一研究的深入程度关系到仿人机器人的设计效果。本文在人体解剖学的基础上建立人体的三维模型,分析人步态行走的特点,设定关节角度变化的函数和各部件的受力使其在地面上行走,得到腿部的运动轨迹和足部与地面接触力的变化曲线。
1 人体的结构分析
根据人体解剖学的研究,人体主要由骨骼、关节以及肌肉组成。其中骨骼起到支撑身体的作用,关节和肌肉能够使人体做各种运动。在人体步态运动中,主要是下肢在起作用,包括大腿、小腿、足部等[2]。
在建模过程中需要对肩关节、肘关节、髋关节、膝关节、踝关节进行研究。肩关节用来连接上臂和上躯干,在步态运动中起到保持人体平衡的作用。肘关节是上肢活动中较为重要的关节,起到连接手臂的作用,对于下肢的运动也有一定的影响。髋关节的自由度较多,能够做内旋、屈伸等多种运动,运动的角度比肩关节小,但是稳定性比较好,所以能够连接好上下躯干。膝关节在人体下肢运动中起到非常重要的作用,其承受着人体的大部分重量,而且起到带动小腿运动的作用;在人体的步态运动中,膝关节主要做屈伸运动,具有少量的翻转运动。踝关节用于连接小腿和足部,踝关节在步态中的主要运动是屈伸,也有小幅度的旋转运动。
2 人体模型的建立
建立人体模型需要考虑人体的形状结构特点、连接关系及其物理性质。人体模型的参数包括:人体各部件的尺寸参数、质量、转动惯量、密度等。采用SolidWorks建立人体三维模型,通过数据转换导入到ADAMS中。人体建模的过程有:
(1) 确定人体各部件的尺寸外形、关节的约束等。
(2) 得到人体模型的空间位置、几何和运动参数。
(3) 确定坐标系,将各部件进行简化,以便分析和计算。
(4) 对模型进行校核并限定关节的运动范围。
(5) 添加人体模型的约束。
2.1 模型数据的获取
人体模型中的主要参数有身高和体重,不同地区、种族的人的身高体重有一定差别。本课题研究的主要对象是中国人的步态,根据王继先等[3]做的调查,我们得到了成年男性的身高大约是170 cm,体重大约是60 kg,选取这一身高体重作为一参考值,具有一定的代表性。对人体结构按照解剖学的结构比例进行建模[4]。
ADAMS提供了一些建模的模块,对于人体比较复杂的部分,ADAMS的建模功能不如一些专用的建模软件。在步态运动中,人的活动主要体现在四肢的摆动上,所以本文将人体分成多个刚体[5],将人体的骨骼肌肉等认为是刚体。
利用SolidWorks按照人体的尺寸建立各部分的三维模型,然后将其中若干部分组成装配体,人体的三维模型如图1所示。
图1 人体三维模型
2.2 在ADAMS中建立地面模型
由SolidWorks建立的模型数据格式需要转化成Parasolid格式,这样转化效率高而且可实现模型的完整转换。在ADAMS中,虚拟的三维尺寸应能够反映真实环境中相应的三维尺寸与位置关系,由于ADAMS的建模功能并不是十分强大,故只建立一个简单的地面模型,如图2所示。

图2 地面模型
3 步态仿真研究
人体的步态运动是一个较为复杂的过程,需要有较为合理的坐标系才能对其进行分析。坐标系有圆柱坐标系、球坐标系、笛卡尔坐标系[6],为了能更准确地描述方位,选用笛卡尔坐标系。
步态的仿真是对人体模型进行动力学和运动学分析,动力学分析法分为正向动力学和逆向动力学[7]。正向动力学分析是指直接在各部件上施加驱动力,然后求刚体的运动轨迹。逆向动力学是指先指定其运动,然后分析刚体上的驱动力。人体模型的结构相对复杂,构件上的力也较为复杂,因此采用逆向动力学分析的方法更为准确。
3.1 人体模型各部分参数的设定
将模型导入到ADAMS后,设定各部分的名称和参数。人体模型各部件的参数如表1所示。
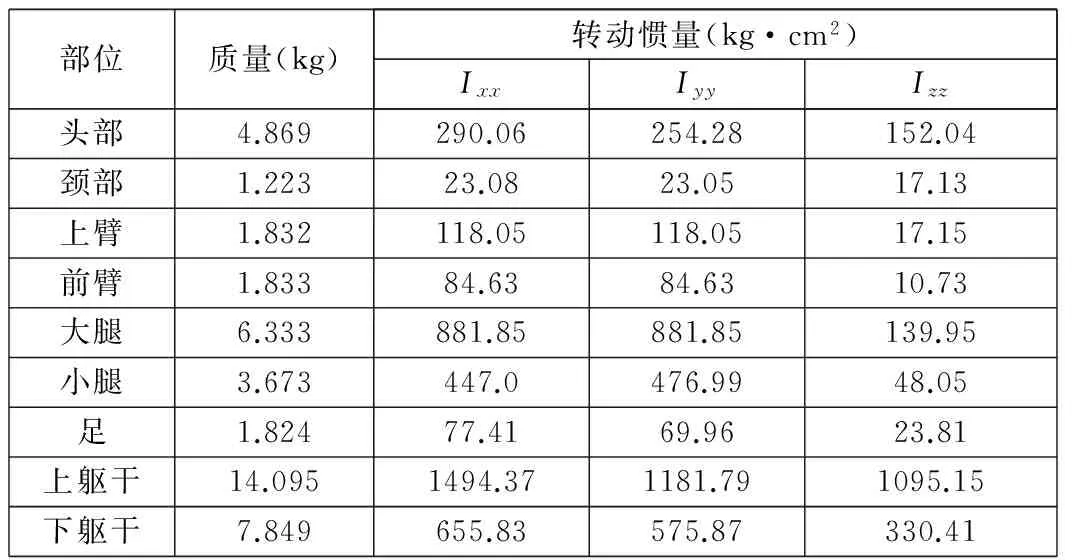
表1 人体模型各部分参数
3.2 创建约束
首先将头部、颈部、躯干合成一个整体,肩关节建立铰接,肘部关节加入球铰接副,髋部关节为球副,膝关节建立铰接副,踝关节建立球副。地面设置一个固定副。
仿真人体步态行走,对各关节进行运动的规划以及平衡的控制,在研究人体动力学的基础上,加载驱动器,足部和地面应设置接触并且使足部在地面上方,设置为碰撞,并设置碰撞的刚度、阻尼等参数,然后施加重力,创建出符合实际条件下的步态运动模型。图3为添加了约束后的模型。

图3 加入约束的人体模型
3.3 关节角度变化控制函数设计
使用STEP函数对角度进行控制,它的基本形式为:STEP(x,x0,h0,x1,h1)。其中:x为自变量,可以是时间或任一函数;x0为自变量的开始值;x1为自变量的结束值;h0为STEP函数的初始值;h1为STEP函数的最终值。
使用STEP函数来模拟肢体角度的变化,x、x0、h0、x1、h1分别用来表示时间、初始时间、初始转动角度、结束时间、终止转动角度。
人的行走是一个一个周期活动,一个步态周期是指从脚跟着地到脚跟再次着地的时间。步态周期分为支撑相和摆动相,支撑相是指脚跟着地到脚离地,每只脚的支撑相分为首次触地、支撑初期、支撑中期、支撑末期4个部分,占整个步态周期的60%左右。摆动相是脚尖离地到脚跟着地,分为摆动早期、摆动中期、摆动末期,大约占整个步态周期40%。人体行走步态周期见图4。

图4 人体行走步态周期
3.4 人体模型运动仿真
设置仿真时间为2.5 s,步长为100步,图5为模型的运动仿真。图6为大腿、小腿质心在水平方向上的运动轨迹。图7和图8分别为大腿质心和小腿质心在竖直方向上的运动轨迹。图9为足底压力曲线。为了验证数据的准确性,将测量好的数据和真实数据进行比对。通过对比发现,模型的仿真是合理的,符合生物力学的原理。

图5 模型的运动仿真

图6 腿部质心在水平方向上的运动轨迹
4 结论
人体模型的步态运动仿真能够反映人行走的规律。由于人体的结构是比较复杂的,故本文对于人步态的研究主要从运动学和动力学的角度着手,通过简化人体模型和约束分析,研究腿部运动轨迹和足底压力变化特点,对于步态识别和机器人研究具有一定的价值。
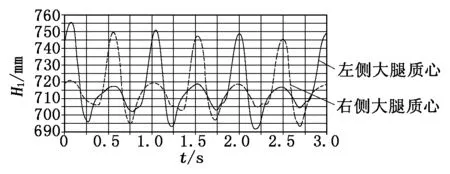
图7 大腿质心在竖直方向上的轨迹
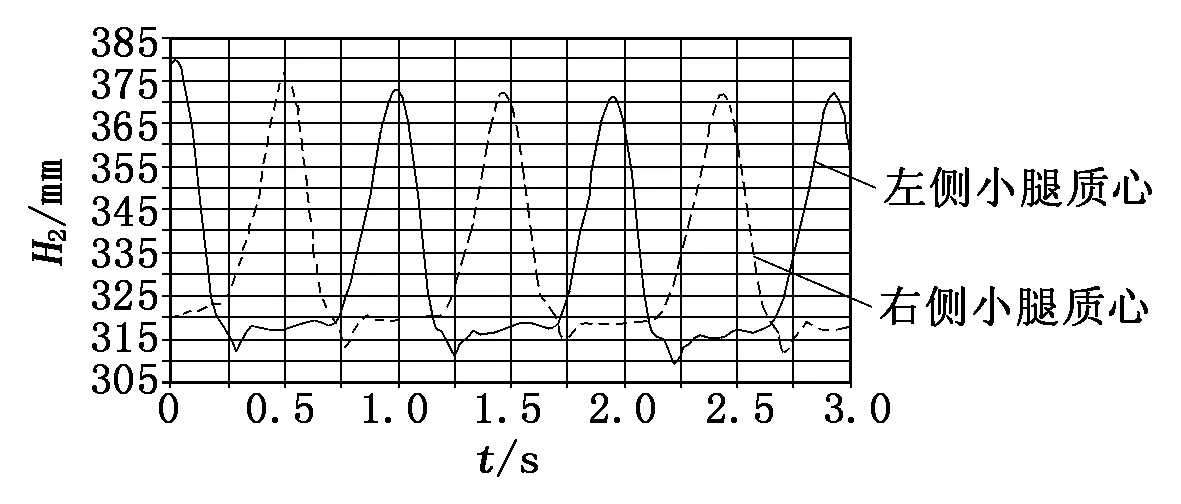
图8 小腿质心在竖直方向上的轨迹
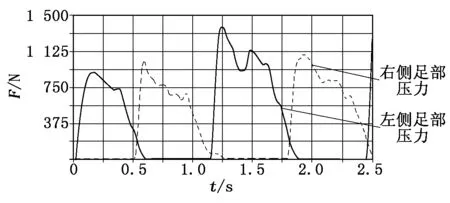
图9 足底压力F的变化曲线
[1] 石俊,姜寿山,张欣,等.人体步态研究与仿真的现状和展望[J].系统仿真学报,2006,18(10):2703-2711.
[2] 罗小美,袁清柯.基于ADAMS人体上肢动力学的建模与仿真研究[J].机电工程技术,2006,35(10):44-46.
[3] 刘健,郑建荣,吴青.基于ADAMS的人体膝关节运动力学研究[J].计算机应用与软件,2012,29(6):202-204.
[4] 纪阳阳,赵辉,张晓利.基于多类特征融合的步态识别算法[J].电气电子教学学报,2009,31(5):67-70.
[5] 郝卫亚.人体运动的生物力学建模与计算机仿真进展[J].医用生物力学,2011,26(2):97-104.
[6] 耿艳利,杨鹏,刘作军,等.下肢运动信息采集与运动仿真[J].医用生物力学,2012,28(1):98-103.
[7] 金德闻,张济川.康复工程与生物机械学[M].北京:清华大学出版社,2011.
Human Body Gait Movement Simulation Based on ADAMS
YANG Nan1, DAI Shi-jie1,2
(1. School of Mechanical Engineering, Hebei University of Technology, Tianjin 300130, China; 2. State Key Laboratory of Robotics and System, Harbin Institute of Technology, Harbin 150080, China)
Based on analysis of human body structure and movement, a model of the human body was established by use of SolidWorks. The model was exported into ADAMS, the kinematical and dynamical simulation of gait was accomplished. The curves of leg centroid motion and plantar pressure were obtained. It provides a theoretical basis for humanoid science and gait recognition.
human model; ADAMS; gait; simulation
1672- 6413(2015)06- 0056- 03
2015- 04- 20;
2015- 08- 20
杨楠(1988-),男,山西太原人,在读硕士研究生,主要研究方向:智能机器人,模式识别。
TP391.7∶TP391.9
A
