轧机自动位置控制停车系统ADRC控制器设计
2015-12-05张瑞成陈陆曦
张瑞成,陈陆曦
(1.河北联合大学 电气工程学院,河北 唐山 063009;2.北京航空航天大学 机械工程及自动化学院,北京 100191)
轧机自动位置控制停车系统ADRC控制器设计
张瑞成1,陈陆曦2
(1.河北联合大学 电气工程学院,河北 唐山 063009;2.北京航空航天大学 机械工程及自动化学院,北京 100191)
在考虑轧辊与轧件间的阻尼力、弹性力和轧辊偏心力的基础上,建立了一个轧机自动位置控制(APC)停车系统的非线性模型,对其动力学特性分析表明该系统具有混沌特性。针对此系统具有非线性、变参数的特点,采用自抗扰控制(ADRC)方法设计二阶ADRC控制器,并在不确定性环境下进行仿真研究。结果表明:ADRC控制器对于系统出现的混沌和大负载干扰具有理想的鲁棒能力,其控制过程快速、平滑,稳态精度高。
自动位置控制(APC);自抗扰控制(ADRC);轧机;设计
0 引言
自动位置控制(Automatic Position Control,简称APC)是现代轧机中最重要的技术之一,依靠APC对辊缝进行精确定位,能极大地提高钢板的轧制精度。但是对于同一套轧机,生产的钢板规格相同,外部条件基本一致,APC控制方法相同,有时APC控制后的钢板不能准确停车,会产生负阻尼的现象,由于负阻尼的作用,在一定条件下,系统运动会变得异常复杂,出现混沌现象[1]。由于在钢板的轧制过程中,存在的未知负载扰动和系统参数变化等都会对轧机自动位置控制停车系统产生影响,传统的PID、自适应等方法往往难以满足其控制要求。因此,针对轧机APC停车系统这种非线性、变参数的特点,设计一种能适应多种工况变化且具有较强鲁棒性的轧机APC停车控制系统是非常必要的。
自抗扰控制技术(Active Disturbance Rejection Controller,ADRC)[2]是由中国科学院韩京清研究员提出的一种不依赖于系统模型的新型控制技术,它能实时估计并补偿系统运行时受到的各种外扰和内扰的综合作用,并结合特殊的非线性反馈结构实现良好的控制品质,具有超调小、响应快、精度高、抗干扰能力强、算法简单等特点,并且适于数字化实现。
目前人们对自抗扰控制在电厂、机器人、电机调速、卫星姿态控制等领域的应用均取得了一定的研究成果[3-6]。本文针对轧机APC停车系统混沌控制问题,使用ADRC方法设计了轧机APC停车系统控制器,进行了仿真研究,获得了良好的控制效果。
1 轧机自动位置控制停车系统数学模型
文献[1]分析APC系统综合受力情况,得到了APC系统停车后的运动方程为:

(1)
其中:x为钢板相对于中心线的位移;k1为摩擦因数;k2、k3分别为与弹性形变相关的系数;F、ω为轧辊偏心力的幅值和角频率;m为钢板的质量。


(2)

针对上述系统,本文提出自抗扰控制策略。
2 自抗扰控制系统设计

(3)

这样,ADRC控制器可以采用如图2所示的标准结构。图2中w为外界扰动,z1、z2、z3为状态变量,ESO为扩张状态观测器。
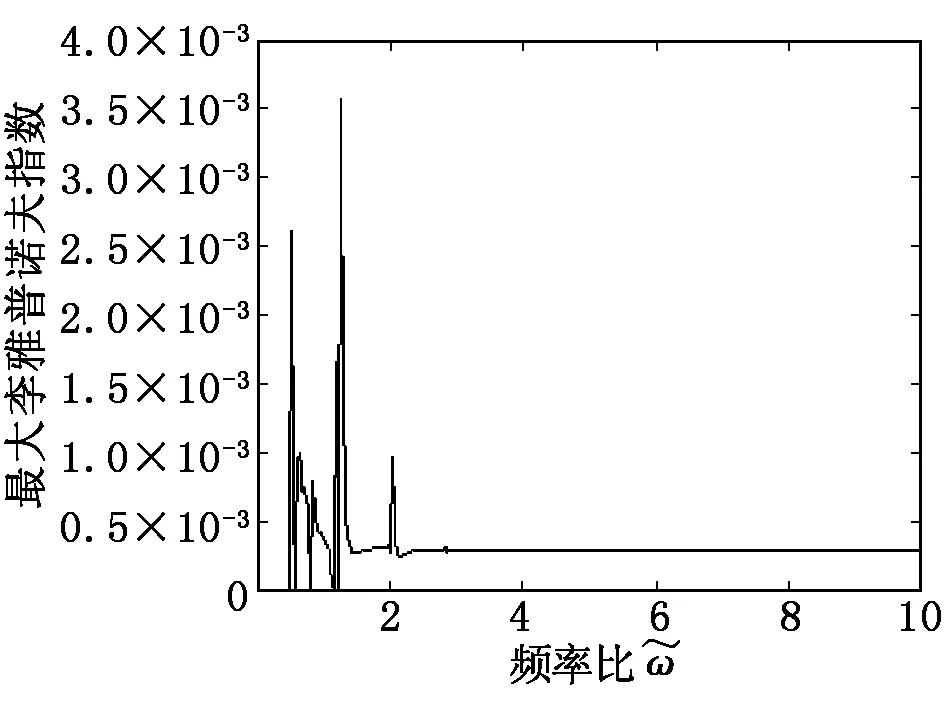
图1 最大Lyapunov指数图

图2 二阶对象ADRC控制器的结构
ADRC由3部分组成:非线性跟踪—微分器、扩张状态观测器和非线性反馈控制律[7-10]。
2.1 跟踪微分器
图2中,跟踪微分器TD安排给定信号的过渡过程,对它给定一个输入信号v0(t),v1(t)跟踪v0(t),v2(t)为过渡过程v1(t)的微分信号。其离散实现为:

(4)
其中:T为采样周期;u(k)为第k个采样时刻的控制信号;r为跟踪参数;h为输入信号被噪声污染时决定滤波效果的参数,可先取h=T,即等于采样时间,然后再根据需要成倍调整;fst(r,h)为最速综合函数,用下面一组关系表达:

(5)
2.2 扩张状态观测器
图2中,扩张状态观测器的离散实现为:
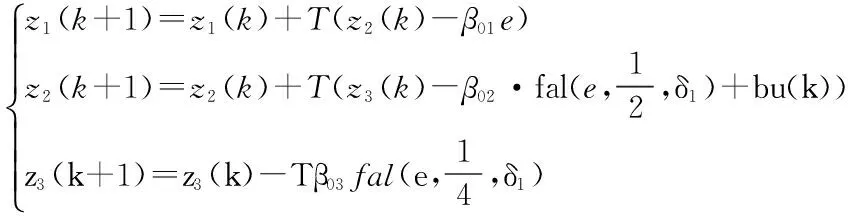
(6)


其中:α′、δ1为控制参数。
2.3 非线性反馈控制律
非线性反馈控制律的离散实现为:

(7)
其中:e1、e2分别为位移和位移的微分误差项;β1、β2为PI的增益系数;α1、α2为fal函数中非线性因子,α1≤α2;u0为非线性控制律;控制量u中的-z3/b项对综合扰动和未建模动态特性进行补偿。
3 仿真实验研究
3.1 阶跃响应实验
根据实际情况,ADRC参数选取如下:r=10,h=0.01,T=0.01,α1∈[0.75,1.25],α2∈[0.75,1.25],b=1,δ1=0.001,β01=100,β02=65,β03=80,β1=100,β2=10。



图3 周期运动时阶跃响应曲线

图4 混沌运动时阶跃响应曲线
3.2 抗干扰实验


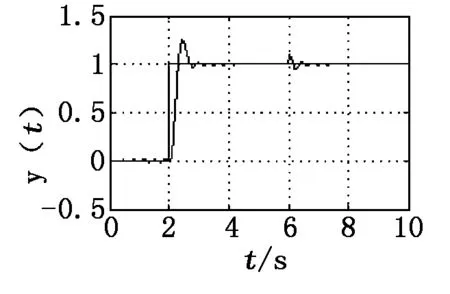
图5 周期运动时的扰动响应曲线

图6 混沌运动时的扰动响应曲线
由图5、图6可见,系统能很快克服较大的干扰,说明抗干扰性能良好。
4 结论
混沌是一种具有非周期无穷统计自相似的有序过程的新现象、新规律,驾驭这种新现象、新规律才能更好地认识自然。由于轧制过程混沌现象的存在,使得现有的APC控制理论与方法都有一定的局限性,为了改善APC系统的控制性能,对这一混沌现象(一种新规律)一定要加以控制、利用。本文利用自抗扰控制方法对轧机APC停车系统中存在的混沌现象进行了控制,仿真实验表明,采用自抗扰控制策略的周期和混沌控制,都具有良好的快速性、精确性和鲁棒性,可以方便地控制全工况运行,具有较高的应用价值。
[1] 张瑞成,柳晓东,陈至坤.轧机自动位置控制系统混沌特性研究[J].控制工程,2011,18(1):54-57.
[2] 韩京清.从PID技术到“自抗扰控制”技术[J].控制工程,2002,3(4):13-18.
[3]Sira-RamírezH,López-UribeC,Velasco-VillaM.Linearobserver-basedactivedisturbancerejectioncontroloftheomnidirectionalmobilerobot[J].AsianJournalofControl,2013,15(1):51-63.
[4]ChenShihe,LuoJia,WuLe,etal.ActivedisturbancerejectioncontrolofshellgasifierinIGCCpowerplants[J].InternationalJournalofControl&Automation,2014,7(6):285-296.
[5] 杨依楠,徐进学,王向东.基于扩张状态观测器的PMSLM自抗扰控制[J].机电工程,2008,25(4):87-90.
[6]WuD,ChenK.Designandanalysisofprecisionactivedisturbancerejectioncontrolfornoncircularturningprocess[J].IEEETransactionsonIndustrialElectronics,2009,56(7):2746-2753.
[7] 韩京清.非线性状态误差反馈控制率[J].控制与决策,1995,10(3):221-225.
[8]ZhongHua,KulkamiVishwesh,PaoLucy.Adaptivecontrolforrejectingdisturbanceswithtime-varyingfrequenciesintapesystems[C]∥2005AmericanControlConference.Portland,OR,USA:IEEE,2005:533-538.
[9] 于希宁,朱丽玲.自抗扰控制器的动态参数整定及其应用[J].华北电力大学学报,2005,32(6):9-13.
[10]王清,宋年年,王佳庆,等.优化自抗扰控制器在主汽温控制系统中的应用[G]∥第二十七届中国控制会议论文集.北京:北京航空航天大学出版社,2008:763-767.
Design of ADRC for Automatic Position Control Stopping System of Rolling Mill
ZHANG Rui-cheng1, CHEN Lu-xi2
(1. College of Electrical Engineering, Hebei United University, Tangshan 063009, China; 2. School of Mechanical Engineering and Automation, Beihang University, Beijing 100191, China)
Based on analyzing the damping force, the elastic force and the roll eccentricity force between the roll and the strip, a non-linear model of the automatic position control (APC) stopping system of rolling mill is derived. The dynamic analysis shows the APC stopping system has the chaotic characteristics. Based on the characteristics of the APC stopping system,such as nonlinear and variable parameters, a two-order active disturbance rejection controller (ADRC) for the automatic position control stopping system is designed, and the simulation is done within uncertainty environment. The simulation results show that the controller has ideal robustness to the system chaos and the large load disturbance, and rapid and smooth control process and high steady precise performances can be implemented.
automatic position control(APC); active disturbance rejection controller(ADRC); rolling mill; design
1672- 6413(2015)06- 0026- 03
河北省自然科学基金资助项目(F2014209192);河北省教育厅重点资助项目(ZD20131011);河北联合大学杰出青年基金资助项目(JP201301)
2015- 02- 04;
2015- 08- 20
张瑞成(1975-),男,河北丰润人,教授,博士,主要从事轧钢自动化方面的研究工作。
TP273∶TG333.11
A
