一种海上通信电子作战控制系统的软件仿真
2015-12-04李冰
李 冰
(西安航空职业技术学院,陕西 西安710089)
0 引 言
在海上作战体系中,一个响应迅速、稳定安全的通信电子作战控制系统往往是整个战争体系的中枢,成为决定战争成败的关键因素。整个系统不仅需要高性能及高稳定性的硬件平台,系统软件的执行效率、软件接口对外界的反应速度、作战控制系统中各软件模块之间的信息交互以及系统数据的加密解密同样十分重要。
同时,现代化的作战体系不仅需要各个作战单元能够自主地对战场复杂的环境做出自适应的处理及反馈,同时,各作战单元能够相互协作,完成同一目标任务。
本文首先分析海上通信电子作战控制系统的组成结构及关键技术,在此基础上提出了一种基于多智能体Multi-Agent的通信电子作战控制系统,详细阐述了智能体Agent 抽象、智能体Agent 集群概念及各智能体之间的相互通信、整个模型系统的结构、软件设计及仿真平台,为现代战争指挥系统的设计提供了一种新的仿真方法。
1 海上通信电子作战控制系统结构
1.1 系统组成总体结构
海上通信电子作战指挥控制系统主要由信息处理系统和操作控制系统两部分组成。其中信息处理系统包括舰船航行坐标及方向信息、武器火力信息、对方目标侦察跟踪信息及通信信息;操作控制系统包括火力发射控制、战争情景融合控制、舰船航行方向控制及通信系统。其实时处理来自传感器采集的数据,通信系统利用无线通信网进行信息发送与接收,对信息的接收和发送还需通过加密解密系统,其结构模型如图1所示。
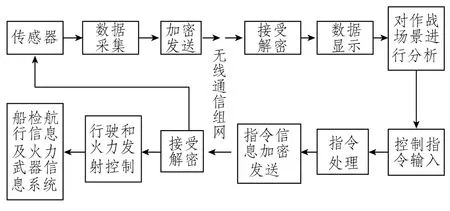
图1 指挥控制系统信息处理流程Fig.1 The information processing diagram of command and control system
在通信电子作战指挥控制系统中,最主要的功能包含以下几个方面:
1)对外界信息的获取。主要包括对对方信息的检测、跟踪及监视等,对我方兄弟单位战况信息的获取,对上级发送信息的快速准确获取等能力。
2)数据处理功能。主要包含对信息的加密解密、综合分析、存储及反馈等功能。
3)战略决策能力,综合各方信息进行分析,最后提供决策任务。
4)功能评估能力,评估整个作战指挥软件的战略决策正确率及实效性。
1.2 Multi-Agent 系统
Agent 技术是一种利用分布式处理结构,在仿真环境中构建虚拟或实体的节点,同时每个节点构建了整个作战环境,利用自身节点的资源和信息处理能力来对外部命令做出相应的处理,与其他的Agent 直接进行信息接收与发送来构建对同一目标的协作,完成整个系统在作战中的共同任务。可以认为一个单独的Agent 智能体具有对复杂作战环境下的自主分析与协调能力。
基于Multi-Agent的作战系统软件仿真技术利用了各自节点的行为与属性关系,通过对战争环境的模拟得到各个作战单元之间的行为模式,同时利用了单独的Agent 节点对整个作战系统信息交互的修正与自反馈来研究整个作战体系对外界的行为规律。同时,这种方式的仿真方法可以模糊对上一级系统的作战行为,而把重点定位在Agent单元这一级,根据这一级的行为模式及运动参数去建立系统的同态结构,比较利于整个系统的稳态性。
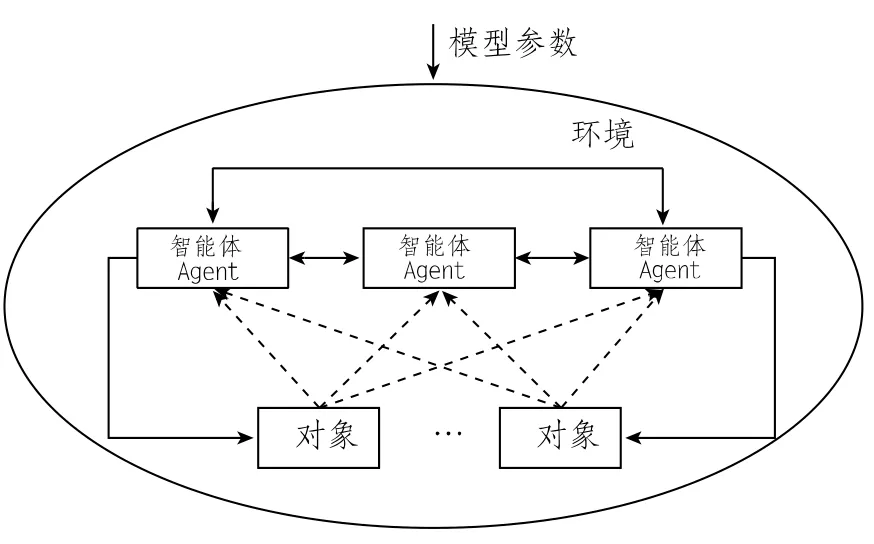
图2 多智能体结构的通信作战控制系统仿真模型图Fig.2 Communication operations control system simulationmodel based onmulti-Agent
对于现有的海上作战电子指挥系统仿真平台,由于环境极其复杂,很难有精准的数学模型来定量分析,通过基于Multi-Agent的软件仿真,可以降低仿真环境的复杂度。
2 Multi-Agent 作战系统软件原理及流程
2.1 通信电子作战控制软件仿真流程
基于Multi-Agent的通信电子作战系统软件对单个作战单元,即1个智能体Agent 可以用4个元素进行描述:智能体Agent 集群、单个智能体Agent控制的对象、所有Agent 集群所处的战争环境以及外界控制的模拟参数。
整个海上通信电子作战指挥系统是一个对整个战争进行作战兵力组织、管理、决策的过程。其利用当前的高频电波对各作战单元信号发送来控制其火力发射过程。基于Multi-Agent的软件仿真模型在复杂的战争环境下可以构建出实时动态变化的组网方式,对Agent 集群内部的单元及对象进行相对独立的控制与反馈,有利于作战单元自身的协调管理及决策,适应战场多变的环境。基于Multi-Agent的通信电子作战系统软件流程如图3所示。
Agent 集群:指海面作战通信指挥系统中所有战争实体集群利用面向对象的思想进行抽象在仿真模型中的行为映射,如单支舰队、空中战机等都可以抽象映射为1个Agent 节点。所有的舰队可以规划为1个Agent 集群,特点是Agent 节点在整个仿真系统中具有自主控制能力。
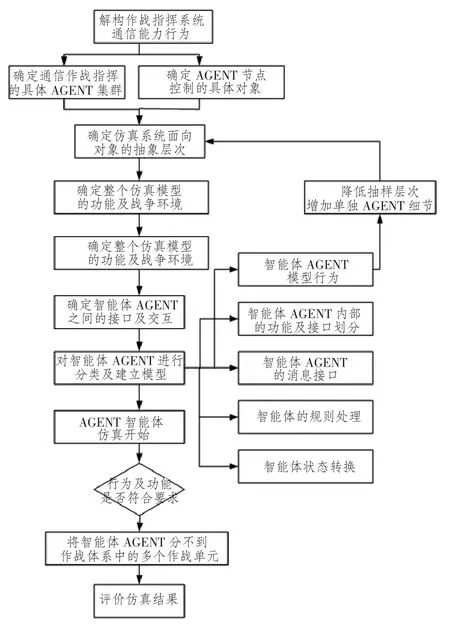
图3 多智能体结构的通信作战控制系统软件流程Fig.3 Communication operations control system software flow chart based onmulti-Agent
Agent 作战单元操作对象:指在作战中被Agent智能体控制,自身不具有行为能力实体的映射,如舰船武器等。
作战环境要素:战场的各种环境因素对Agent作战单元具有指挥决策意义,用来和智能体发送环境决策命令。
控制参数:用来对整个基于Multi-Agent的通信电子作战系统软件进行控制,并对仿真结果进行分析。其包含整个仿真系统的初始参数、中间过程的反馈参数以及运行结束的阀值参数、运行结果的统计分析参数等。
2.2 Multi-Agent的作战系统软件结构
基于Multi-Agent的通信电子作战系统软件仿真是以Agent 节点为自主控制的主要元素,与群内的Agent 智能体以及外部群的智能体的通信作为整个通信作战控制系统的信息传输核心。仿真模型的建立主要考虑以下问题:作战智能体Agent的抽象描述及Agent 群的划分;智能体Agent控制对象的抽象;智能体Agent 之间的通信联络以及整个系统的Agent 智能体及控制对象的约束限制等。
在此,本文构建了Agent 智能体为最小作战单元的多层次描述结构,主要分为标记(AID)、描述(Character)、状态(State)、动作(Action)、控制对象 (Cbject)、 信 息 传 输 (Message) 及 目 标(Target)等7 种。具体作用如下:
1)AID 标记:在整个仿真系统中,智能体Agent 只能有唯一标记符,用以区分其他Agent。
2)Character 描述:用来描述智能体Agent 自身属性,如舰船Agent的航向、坐标,所具备的通信能力以及武器库等。
3)State 状态:描述智能体Agent 状态信息,如是在进攻状态还是在就绪状态、是利用无线网络还是卫星通信网络进行信息交互等,其随着自身的行为感应及外部环境而变化。
4)Action 行为:作战中的具体行为,如向敌方发射武器、为友邻智能体Agent 进行掩护,是作为自身事件或外部事件驱动而做出的反应。
5)Obejct 对象:智能体Agent所能控制驱使的对象,包括兵力部署以及武器等。
6)Message 对象:智能体Agent 与其他Agent进行信息交互的桥梁,在软件中可抽象为具体的数据结构及信息的接收与发送指令函数。
7)Target 目标:智能体Agent 进攻的对象。
在基于Multi-Agent的通信电子作战系统软件编程中,可对智能体和对象进行面向对象的封装,其特征属性如表1所示。

表1 Agent 与对象的抽象元素Tab.1 Abstract element of Agent and object
其用面向对象语言描述如下:

3 基于Multi-Agent 技术展望
在现代战争中,不仅需要战争中各个作战单元能够自主根据各种战场环境做出迅速的反应,及时地进行战略部署。同时,各作战单元之间需要相互协调合作,完成统一的作战任务。特别是在现代战争中,海陆空多维兵力的统一部署。基于Multi-Agent的通信电子作战系统软件,利用各个智能体Agent 之间的相互通信是协作,每一个Agent 都具有高度的自治性。
无线传感网络是实现Agent 获取外部战场信息的基础,通过各种传感器将舰船、飞机、侦察机及地面传感器组成统一的网络,为Agent 快速提供各种情报信息。
这种基于Multi-Agent 指挥控制技术,与现在软件的开放式、模块化以及面向对象抽象化的结构相得益彰,同时与软件无线电技术、信息融合技术等构成了现代化的指挥系统中最重要的关键技术。
4 结 语
在现代化的海军战争指挥系统中,由统一的作战指挥平台对各个作战的单元进行垂直的作战指挥及战略部署已不能满足复杂多变的战争环境。对战场的快速反应已经成为战争成败的关键,不仅需要战争中各个作战单元能够自主根据各种战场环境做出迅速的反应,及时进行战略部署。同时,各作战单元之间需要相互协调合作,完成统一的作战任务。本文提出了一种基于多智能体Multi-Agent的通信电子作战控制系统,详细阐述了系统的模型结构、软件设计及仿真平台,为现代战争指挥系统的设计提供了一种新的方法。
[1]PRASANNA M,HERBERT D.Ad hoc study on human robot interface issues[R].Army Science Board- 2002 Ad Hoc Study,2002:15-16.
[2]PAWLOSKI S J.Modeling tactical level combat using a multi-agent system design paradigm(Gl AGENT)[D].Naval Postgraduate School Monterey,California,2001.
[3]王严辉,李加祥.支持一体化协作指挥决策的统一决策空间[J].舰船科学技术,2012,34(1):121-124.WANG Yan-hui,LI Jia-xiang.Research on unified decisionmaking space for integrative collaborative command[J].Ship Science and Technology,2012,34(1):121-124.
[4]王子明,徐海峰,王宗杰,等.基于战术动作的舰艇作战指挥过程建模[J].舰船科学技术,2012,34(6):91-94.WANG Zi-ming,XU Hai-feng,WANG Zong-jie,et al.Vessel warfare process modeling based on tactics comportment[J].Ship Science and Technology,2012,34(6):91-94.
[5]JACOFF A,ELENA M.Test arenas and performance metrics for urban search and rescue robots [C]//Proceedings of the 2003 IEEE/RSJ International Conference on Intelligent Robots and Systems Las Vegas,NV,2003,10:27-31.