小型船舶直流无刷推进器控制系统
2015-12-04韩俊青
韩俊青
(德州职业技术学院,山东 德州253000)
0 引 言
近几年,随着我国海洋开发的深入,政府对海洋环境的关注也越来越多。2011年3月出台的国家环境保护“十二五”规划中,多次强调了对海洋环境的保护。同年5月11日我国发布了首个国家海洋发展报告,以2009年为例,详细介绍了我国近岸海域总体污染的情况。5月24日,国家海洋局又宣布将新建5个国家级海洋特别保护区,这些都表明我国对海洋环境保护的重视。
现有小型交通船大多采用柴油机作为动力,而柴油机在运行中由于机械部件不断振动会产生巨大的噪声,同时由于柴油燃烧不充分会产生大量的废气,这些都对海洋环境造成污染。而电力推进船舶不能进入民用市场的真正原因是由于造价高,亟需性能可靠但价格低廉的推进电机系统,无刷直流推进电机正好能够满足现实要求[1]。
1 推进电机控制系统硬件设计
电机驱动模块是电力推进船舶的核心部分,其主要作用是接受来自驾驶室操纵人员的控制信号。主要功能包括:
1)电机驱动模块根据控制信号调整推进电机的实时工作状态,十分高效地将高能蓄电池所储存的电能转化为推进电机输出的机械能。
2)实时监测推进电机和自身的工作状态。当工作不正常时,报警模块和显示模块会做出对应的显示和提醒。其硬件整体框架如图1所示,其主要包含DSP 主控电路模块、主功率逆变桥电路模块和外围接口电路模块。
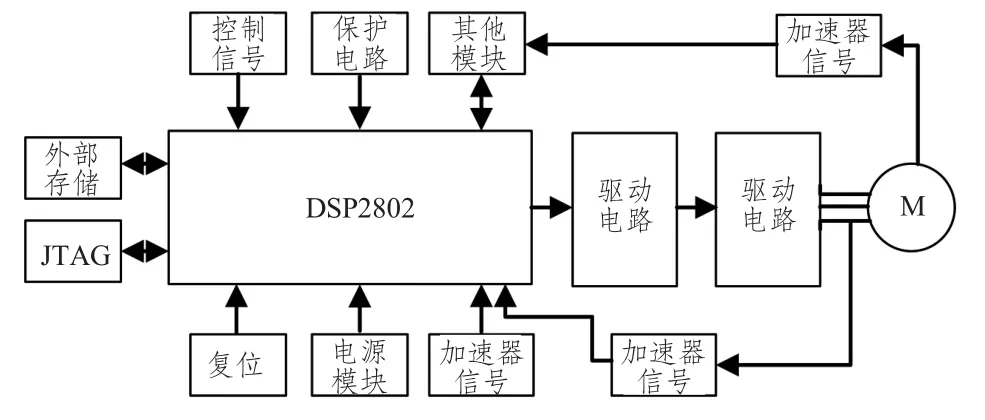
图1 硬件整体框架Fig.1 Hardware overall framework
主控器选择TI 公司的高速芯片DSP,基本的外围接口电路用于实现信号的输入和输出,此外还包括通讯接口。控制芯片DSP 对采集的模拟信号进行处理后输出相应的控制信号,控制信号通过输出接口对功率器件进行PWM控制,可以实现最优化控制[2]。
2 电源电路设计
电源电路是直流无刷推进电机控制系统直接影响到整个控制系统的性能,因此将进行充分讨论。推进系统的能量来源是动力蓄电池。本方案的供电模块采用隔离多副边高频变压器DC/DC 变换,将高压转换为低压5 V,12 V,15 V 输出给系统供电,以减少主功率变换回路的电磁干扰和缓冲一些高电压、大电流的能量冲击,此模块采用兼容性比较好的电源芯片UC2842B 来实现。此外,为了最大限度地降低动力电源对低压控制系统的影响甚至损坏,需要将控制系统的电源部分与动力电源进行有效隔开,功率回路的监控信号和测量信号则通过耦合电路进行信号隔离后再传输[3]。
本控制系统中包含有许多数字信号和模拟信号,为减小模拟线路和数字线路之间的干扰,不仅数字部分和模拟部分应分别供电,而且控制系统中的数字地和模拟地也应分开,最后再通过单点连接的形式把模拟地和数字地汇总到一起。
TMS320F2802 主控电路及其外围接口电路分别都需要多种电源输入,12 V的直流电源给外围接口电路和一些传感器供电,5 V的直流电压给主控模块供电。DSP 正常工作时既需要给片上资源3.3 V 直流电源,也需要给内核供电的1.8 V 直流电源。方案中选用REG1117 型号的电源芯片,最大输出电流为800 mA,该芯片在瞬态响应速度和输出电压质量都比同类电源芯片要好。电源部分的电路如图2所示。
其中电源芯片REG1117-3.3 是为TMS320F2802的片上资源提供能量,REG1117-1.8 是为TMS320F2802的内核提供能量。还需要在输出端都串有电感,电感量的取值在0.1 uH 左右,以降低互相的干扰,电源的输出应在模拟地和数字地之间用一个小电感相连,以降低模拟信号和数字信号之间的干扰。尽可能地保证主控芯片DSP 能够输出稳定、快速、准确的控制信号。
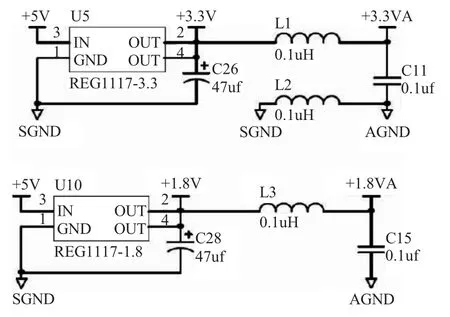
图2 电源电路Fig.2 Power circuit
3 元器件的布局设计
控制电路板上元器件的布局设计非常重要。在进行元器件布局时,需要将功率层和控制层布在不同的层面上,可以按照2 层结构进行PCB 设计,这样做可以确保各个层之间不会产生干扰和控制器在正常工作时能够具有良好的抗震性能。上层主要放置有加速踏板输入模块、通讯接口模块,DSP 芯片、采集外部开关量信号模块、功率管驱动模块、输入电源模块、所有的电容器件、传感器输入模块等。下层主要放置功率器件,并以导热硅胶耦合的方式与散热器进行散热。
此外,当电机启动时,瞬间的电流值会非常大,会超过蓄电池的最大放电电流,因此需要在瞬间启动过程中,在中间层上面并联许多大电容,让这些电容参与放电以弥补蓄电池的缺陷。根据控制器所需要的供电直流电压为72 V,选用标称容量值为330 uF,耐压值为100 V 为电容。底层功率逆变桥上的功率管都选择表贴式封装,这样便可以贴在PCB 上,由于功率管上走的电流很大,因此PCB的厚度要保持一定的余量,方案中的厚度为5 盎司。为了便于MOS 管散热,通过PCB 与铝基板之间设计导热绝缘层把热量传递给铝基板,铝基板用导热硅胶与外部散热片耦合,产生的热量最终通过散热片进行散热。
图3 元器件的布局Fig.3 Layout of components
元器件采用这种布局方式不仅结构看上去很清晰,而且非常便于进行PCB 测试和排查故障。整体分局分为2 层,当其中一层损坏时,可以根据兼容的模块直接更换,十分方便。
4 软件设计
小型船舶直流无刷电机控制器的智能化程度比起硬件来更取决于软件的设计合理性,船舶在正常航行时会遇到各种复杂多变的恶劣环境。要当操纵人员发出指令信号后,控制器根据船舶的环境状态对船舶所有部件发送控制信号,还要对功率逆变桥模块发送控制信号以优化电机性能。通过检测操纵人员发出的控制信号和加速踏板的控制信号,并采集定子电流信号、转子位置信号以及一些外部信号等。利用DSP 处理数据的高效性能处理这些信号后输出供电电流,从而对电机转矩进行实时控制。软件的设计应力求高效,以缩短处理的时间。
为了便于调试,在进行软件设计时,采用模块化方法。整个软件主要包括主程序和中断子程序。主程序里主要包括系统的初始化程序、外部信号的检测程序、产生PWM 程序等。中断子程序主要负责对中断事件进行响应,并及时处理中断事件以达到控制满足控制系统的实时性。
图4 为软件设计流程图,系统启动后首先进行初始化处理。初始化程序包括通过各个传感器采集当前的工作参数和内部系统的检测程序,它能够保证信号采集工作的正常进行。中断服务子程序包含情况如下:
1)采集推进电机的转子位置信号,为功率器件的换相时间提供依据;
2)采集船舶的方向信号,为船舶的航行方向提供依据;
3)采集加速踏板的控制信号,为电机转速的输出提供依据。
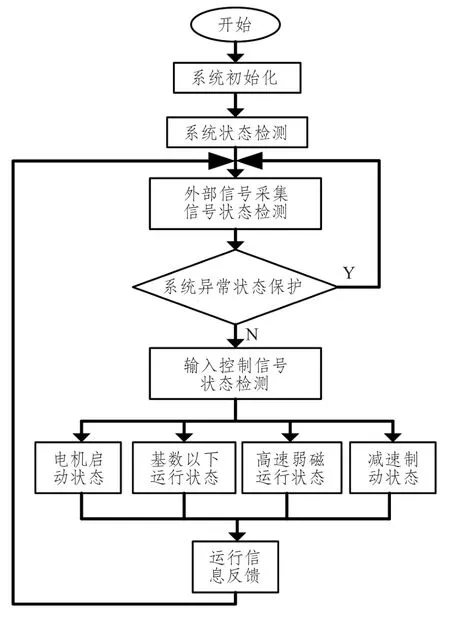
图4 软件设计流程图Fig.4 Flow chart of software design
船舶在正常航行时,采用某一控制策略,控制器对操控员输入指令进行处理后,输出电机的控制信号[4]。
5 实验结果分析
系统测试的目的是调试各种参数使其满足船舶电力推进的要求,使其能够长时间地在海洋中各种复杂多变的环境中稳定可靠地运行。因此,超负荷工作测试和海上实船试航是船舶推进系统测试中至关重要的2 道流程。
测试硬件系统如图5所示。硬件系统包括控制器、直流屏、输出电压为72 V、容量为140 A的蓄电池组、功率为7.5 kW的无刷直流电机、热温枪、钳形表等。
其中直流屏信息为:供电电压380 V,输入电流0~150 A,输出电压为12~120 V,输出电流0~200 A。蓄电池组信息为:已注水的铅酸蓄电池,采用输出电压为12 V、容量为140 AH 相同参数的6个蓄电池串联而成。

图5 测试硬件系统Fig.5 Test hardware system
图5 中包含有2个控制器,其中一个控制器作为推进电机的驱动,输入直流电源经直流屏连接到此控制器,控制器输出三相电源驱动7.5 kW的无刷直流推进电机;另一个控制器的电源由蓄电池直接供电,控制器的3个接线端子分别和另一个7.5 kW的无刷直流电机的输入相连接,代替推进电机的负载。
5.1 能量回馈实验
电机驱动器控制推进电机高速旋转,带动另一台相当于发电机的电机运转,电机负载控制器只需要开启信号,相当于逆流或制动航行过程。通过测量流进蓄电池的总电流,发现电机转速与电流大小保持递增关系,可以达到能量回馈目的[5]。
5.2 高温实验
温度的升高对控制器性能参数影响很大,可能会破坏其工作的稳定性甚至彻底损坏控制器。控制器需要在高温环境中超负荷工作一段时间,用阻值为0.2 Ω的纯电阻负载代替电机的负载,负载如图5所示。把电阻分别接到U 相和V 相之间以及V 相和W 相之间,然后进行过流测试。在20~25 kW的静态功率下测试功率器件在超过额定功率时的极限实验,检测其是否具有过载能力。测试电力场效应功率管的耐受时间和温升状况,进而推断出控制器在额定功率下的稳定性能。此外,在进行实验时,温度保护功能以及长时间过流过载保护功能等必须关闭,确保实验数据的准确性。
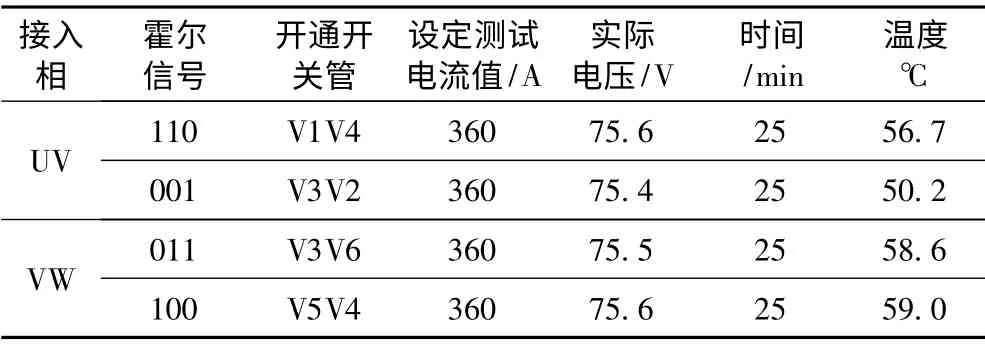
表1 过载实验数据表Tab.1 Overload experimental data table
由表1 可得出,在大电流下进行系统静态实验时,温升和电流都满足电力推进船舶的实际应用需求,具有可靠的热稳定性能。
整个实验的持续时间为60 min,船舱内温度为30℃,控制器中散热器的温度保持在51℃左右。实验结果表明:控制器的散热效果很好,功率开关器件等电子元器件工作正常,没有受到功率器件等大量发热的干扰。控制器的开盖测试是在环境温度为55.4℃的条件下。
5.3 海上试航实验
海上试航实验主要测试电机的定子电流的变化、推进电机的控制器性能以及适应性能,为接下来的多次控制器的优化参数提供依据。实际装船测试的船体为最常见的普通渔船,船体和蓄电池的重量为1.2 t,推进电机为定制的7.5 kW的无刷直流推进电机,最大载重可以达到300 kg,蓄电池的输出电压可达到72 V、容量为280 AH的动力铅酸蓄电池。测试时间在上午,测试环境为风平浪静的海面,船舱外的测试温度在20℃左右。
动态实验结果表面:当扳动前进挡位并踩下油门进行启动时,无刷直流推进电机的过载能力非常好。当进行连续加速并达到最大速度79 km/h,响应时间只有20.8 s。当载3个成人时,可以以1.5 km/h的速度前行,航行距离达到4 km 时才进行温度报警。当把蓄电池组充满电时,在装载20个人并进行变速航行的条件下进行测试,续航的总距离可以达到200 km。在进行推进电机的堵转实验时,拉起刹车,电机停止转动,此时打开总电源,扳动前进挡位,踩下脚踏板进行缓慢加速,电机处于堵转状态。接着扳动档位至后退挡,踩下脚踏板进行缓慢加速,电机处于堵转状态。两次测量的的堵转电流都在360 A 左右,持续20 min 后,测量控制器的散热铝基板温度约为48℃。再运行5 min 后,控制器开始温度报警。经过在实验室的静态测试和海上试航试验,各项性能指标都可以满足电力推进船舶的需求,可以进行推广应用。
6 结 语
本设计以德州仪器公司型号为TMS320F2802的DSP控制器为主控制器,以大功率场效应管为功率器件组成逆变器,完成了小型船舶直流无刷推进控制系统的设计开发。其中,DSP 芯片的选择至关重要,利用它高效的数据处理性能,才使得电机的控制性能保持良好。最后,关于大功率的无刷直流推进电机控制器还需要进行性能改进,例如电磁兼容性的设计、控制算法的优化以及无位置传感器、整体的PCB 布局及散热处理等都值得科研人员在今后进行更深入地研究。
[1]沈龙.集成电机推进器控制系统的研究与设计[D].哈尔滨:哈尔滨工程大学,2012.
[2]汤建华,赵乌恩,杨子龙.船舶综合电力推进技术发展思路研究[J].舰船科学技术,2010,32(5):133-138.TANG Jian-hua,ZHAO Wu-en,YANG Zi-long.Research on ship' integrated power system development notion[J].Ship Science and Technology,2010,32(5):133-138.
[3]云峻峰,黄仁和,赵建华.现代舰船电力推进设计走向[J].舰船科学技术,2003,25(1):3-8,18.YUN Jun-feng,HUANG Ren-he,ZHAO Jian-hua.Trend to marine electric propulsion design[J].Ship Science and Technology,2003,25(1):3-8,18.
[4]郭燚,郑华耀.船舶电力推进电机驱动技术研究[J].舰船科学技术,2005,27(4):22-26.GUO Yi,GUO Hua-yao.Research on vessel electric propulsionmotor drives technology[J].Ship Science and Technology,2005,27(4):22-26.
[5]钱金娣,林德辉.燃料电池用于电力推进的方案探讨[J].舰船科学技术,1979(5):1-8.
