基于79F9211单片机的无刷直流电机控制器设计
2015-12-02赵国树周黎英
赵国树+周黎英

摘 要: 随着无刷直流电机的广泛使用,其控制器市场竞争愈发激烈,优良的性能和低成本之间的矛盾日益突出。硬件部分采用了较高性价比79F9211单片机为控制器,设计了IGBT驱动电路及其他辅助电路,完成了一种三相无刷直流电机控制系统。在双闭环调速环节,采用改进的积分分离PI算法,优化了电流采集的数字滤波算法,满足了无刷直流电机控制的动态和静态性能要求,降低了控制成本。最后通过实验验证了系统的可行性。
关键词: 无刷直流电机; 79F9211单片机; 双闭环控制; 改进的积分分离PI算法; 消抖递推滤波算法
中图分类号: TN710?34; TP391.4 文献标识码: A 文章编号: 1004?373X(2015)22?0142?05
无刷直流电机(Brushless DC Motors,BLDCM)具有高效率、大转矩、小体积等特点,目前已经广泛应用于电动汽车、航空航天、家用电器及工业控制领域。随着技术的进步,BLDCM越来越向小型化、控制器全数字化、结构新型化和控制先进化方向发展[2]。当前市场日益竞争日益激烈,除了期望控制器有较好的静态、动态性能,还对控制成本提出了更高的要求。
早期的控制器多采用专用处理器,不利于拓展和二次开发。随着电子技术的发展,DSP及集成功率芯片的出现,为运动控制提供了良好的平台,但随之成本也相应提高。针对上述问题,采用了可靠的低成本方案实现了全数字无刷直流电机系统。
1 系统结构及单斩PWM控制
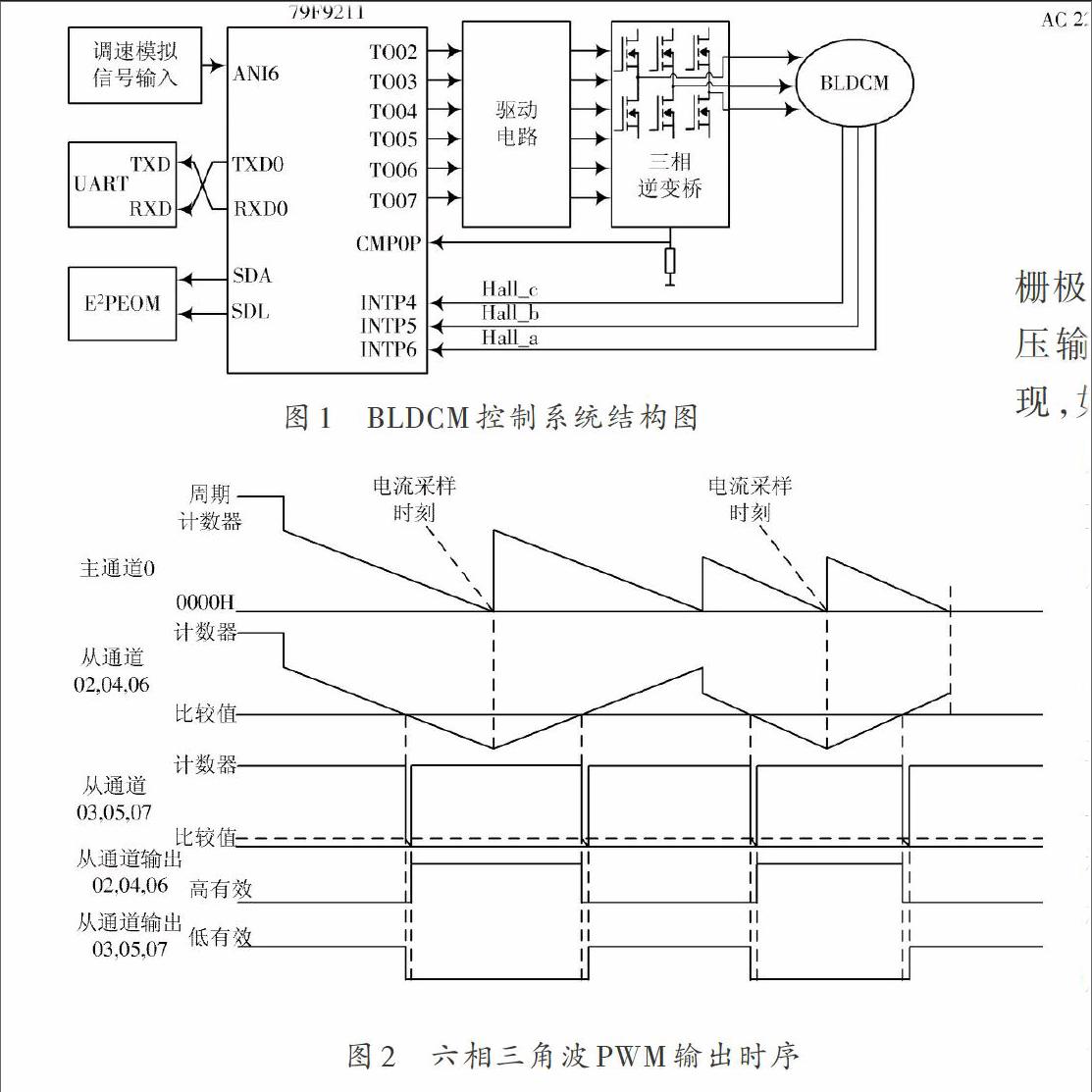
BLDCM控制系统硬件部分由微处理器、功率驱动电路、电流检测电路、霍尔信号输入电路、调速电路等组成。如图1所示,外部调速信号经A/D转换,给控制系统提供速度给定,控制系统根据控制策略完成电子换相并改变PWM占空比,功率驱动电路完成对IGBT的调制,通过改变电机的定子绕组电压改变转速。双闭环调速系统所需的电流和速度值通过采样电机母线电流和霍尔信号得到。
μPD79F9211是瑞萨推出的16位的单片微控制器,性能很高且非常适合BLDCM控制,其成本比最普通的8位单片机还略低。μPD79F9211的多功能定时器阵列单元(TAUS)在40 MHz的最大分辨率下可提供带死区时间的6路 PWM 输出;有多种硬件触发A/D转换方式,可准确地避开电机换相时刻,提高采样电流的精度;内置的运放电路简化了电路设计,提高了抗干扰能力;内置乘/除法器提高了运算性能,此外,多功能定时器配备了双通道比较器用于自动故障检测及过电流保护。
μPD79F9211的7个通道组合输出产生6路三角波PWM信号。如图2所示,通道0是主通道,由周期值开始向下计数,其两个周期构成一个50 μs的PWM载波周期。其他为从通道,其中通道2,4,6运行在上下计数模式并调制占空比;通道3,5,7工作在单次向下计数模式,控制死区时间。实际控制时,为减小开关损耗,仅调制上半桥臂进行PWM斩波,另一路下桥臂采用电平控制。
外部中断设为上、下沿触发方式,当霍尔信号到来时进入外部中断,在中断服务程序中,Timer09记录相邻两次霍尔事件之间的计数脉冲值,通过计算可得到间隔时间;并根据当前的霍尔序列查表产生如图3所示的对应的输出序列。其中下桥臂为高电平关断,低电平导通。
2 控制系统硬件设计
2.1 电源电路设计
BLDCM控制器电源分3部分:
(1) 310 V母线电压源。如图4所示,压敏电阻R1对电路起防过压保护作用,两组LC低通滤波器用来抑制EMI信号,经整流后,由继电器和电阻构成的软起动电路对滤波电容充电,抑制浪涌电流。
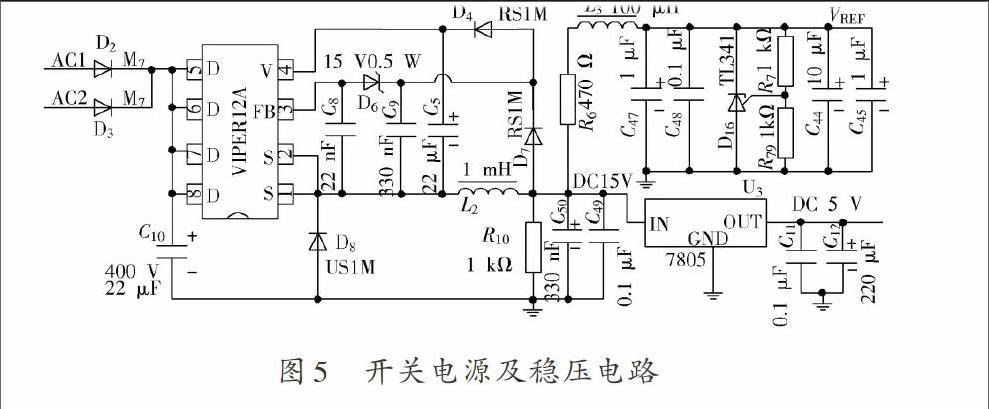
(2) IGBT驱动电压。IGBT是电压控制型器件,其栅极驱动电压一般为15 V左右,由85~265 VAC的宽电压输入的开关电源芯片VIPer12A构成稳压电源来实现,如图5所示。输出电压经15 V稳压管D6后的差值反馈到FB端,与内部基准电压进行比较,改变VIPer12A内部开关时间,从而控制输出电压,实现稳压目的。
(3) 单片机、霍尔电路、调速电路等需要的5 V电源可由15 V电压经三端稳压芯片稳压后产生。无刷电机的母线电流、调速模拟信号都需要经过A/D转换,其参考电压精度很大程度上决定了采样精度,因此除了将模拟地和数字地分开只在一点用磁珠相连,还应该设置精准的A/D基准源。如图5所示,基准电压集成芯片TL431的参考端电位为2.5 V,精密电阻R7,R79阻值1 kΩ,则VREF= 2.5[R7+R77R7]=5 V。
2.2 霍尔信号输入电路
BLDCM产生的霍尔信号首先由上拉电阻提高输出电平,一方面,若断开霍尔接口,输入将为错误霍尔序列111,作故障报警提示;另一方面可提高噪声容限,降低由干扰源造成的影响。该信号经低通滤波电路滤除高频干扰后,经斯密特触发器U5整形,送入外部中断引脚INT4~6。如图6所示。为实时获取霍尔脉冲跳变,应设置中断优先级为高,且设置中断方式为上升、下降边沿均使能。
2.3 IGBT驱动电路设计
目前在市场上有很多成熟的集成功率驱动芯片可供选择,但价格成本较高。图7所示设计了一种可行的IGBT驱动方案。采用基于N型衬底的非穿通技术的IGBT ——GIB10B60KD1,额定电压为600 V,额定电流为10 A,可承受瞬间脉冲电流32 A,具有10 μs的导通能力。
当UH,UL均为低电平时,高频小功率管Q10关断,R14中无电流,Q4因失去偏置电压而关断,随之二极管D12也立即截止,栅极电压将Q7导通,上桥臂因栅极电荷迅速释放而快速关断;同时UL为低电平,Q22截止,Q19导通,R26的端电压使Q13饱和导通,驱动电压经栅极电阻R29后使下桥臂导通。驱动电阻R29限制了IGBT的[didt]或[dudt],以保护IGBT。下桥臂导通,U被下拉至地,15 V经自举二极管D11对自举电容C18充电;反之,当UH、UL均为高电平时,Q10导通,R14上的压降使Q4导通,D12和R11上的压降使Q7发射结反偏,处于关断状态,IGBT的放电通道被阻断。由于Q4导通,驱动电压经D12和R11使上桥臂IGBT导通,U端出现高电位,D11阴极电位上浮,致使D11截止,自举电容接替15 V完成栅极驱动。同时UL为高电平时,由于Q19基极电压也为5 V,Q19关断,R26无电流通过,Q13因无偏置电压而关断,下桥IGBT驱动电压被断开。同时Q22导通,在下桥IGBT栅极和地之间建立的放电通道而迅速关断。因此上桥臂导通,下桥臂截止。得出表1的对应关系,其他两相与此类似。
2.4 电流检测电路
图7中R8,R9等值功率精密电阻构成母线电流检测回路,等效阻值50 mΩ。母线电流由R4和C7构成的低通滤波电路滤除高频干扰后,连接到片内可编程增益模拟输入端CMP0P,通过对OAM寄存器编程设置6倍的放大系数,输出信号作为A/D转换器和内置比较器正端的模拟输入,比较结果可作为过流保护,可关断所有调制信号。为防止小信号造成失调和噪声干扰,在输入信号上叠加直流偏置信号,根据电压叠加定理,得CMP0P引脚上的电压为:
[VCMPOP=R5R4+R5×Vsam+R4R4+R5×5 V≈0.98Vsam+98 mV ≈0.98×Isam(A)×50 mΩ+98 mV]
3 系统软件设计
3.1 BLDCM控制策略
传统PID控制算法,结构简单,容易实现,但由于微分存在高频干扰信号同时放大的缺点[5],在电机控制中常用PI控制器构成双闭环系统[3?4]。相对位置式PI算法,增量式PI算法误动作小,调节时,只在原来控制量上叠加调节量且方便通过加权处理优化控制,增量式PI控制表达式为:
[Δu(k)=KP[e(k)-e(k-1)]+KIe(k)] (1)
式中:[Δu(k)]为增量式PI调节输出;e(k)为偏差,即给定值与测量值之差;e(k-1)为前一次的偏差。
在双闭环调速系统中,电流环在加、减速时动态响应快,并能改善母线电压波动带来的影响,采用经典的PI基本能满足要求;若要速度稳定,则主要是靠转速环完成。然而单一的PI参数无法同时满足动态响应和稳态性能的要求,原因是:电机起动时偏差e(k)很大,速度环输出饱和,即电流环的给定不变,速度环实际上相当于开环,系统成为恒流控制下的电流调节系统[5];为了加快响应速度,需要较大的KP,同时为防止积分饱和又需要较小的KI甚至为0;为了提高稳态精度,避免振荡,又期望KP,KI都较大。为此,速度环采用了改进的积分分离的PI算法,如图8所示。
取偏差阈值B,M,S,VS,即对应偏差大、中、小、很小。C为电机最大允许输出电流A/D值。速度环输出:
[u(k)=uk-1+Δuk] (2)
[Δu(k)=KP[e(k)-e(k-1)]+λKIe(k)] (3)
[k=C, ek>Bλ=0, M 当[ek>B],偏差大,[Δu(k)=C],电流给定不变,单闭环恒流调节,允许电机以最大允许电流输出转矩,加速起动过程;当[M 为方便PI参数调整,单片机串口外接了蓝牙模块,通过该模块与PC端的蓝牙通信,通过调试软件可进行参数的修改,加速整定过程。 3.2 中断信号的处理 BLDCM控制能否取得较好的效果,一是取决于算法本身,另一个则在于测量参数的准确度。在BLDCM控制中,转速、电流、调速信号是闭环控制的三大影响因素。若测量误差很大,势必影响控制精度。调速模拟信号在低通滤波、A/D转换后,经中位值法滤波就可以达到较好的效果,下面主要讨论转速和电流测量。 (1) 转速测量。在霍尔信号中断中,根据三路霍尔序列查表输出控制相序的同时进行测速是最常使用的方法,但由于霍尔元件位置安装精度问题,在转子高速转动时,产生的测速误差很大。实验所用BLDCM极对数3,转子每转过20°就产生1个霍尔信号,每转1周产生18个霍尔信号。对同一电机,提高测速精度可从两个角度考虑:一是提高计数脉冲频率,频率越高,相邻霍尔序列之间计数越多,误差越小;二是采用适当的软件滤波算法,单纯的平均值滤波影响转速的实时性,采用递推平均值滤波算法是比较好的选择。 (2) 电流检测。电机的电流采样信号中伴随很多噪声信号,换相时的IGBT开关噪声、电路的电磁噪声等对电流检测带来很大困扰。除了硬件电路上做好布线、接地、采用独立的参考电压基准源及进行低通滤波外,软件处理也很重要。首先是采样点的选择。由于采用上桥PWM调制,在一个PWM周期中,如上桥WH调制,下桥UL恒通。当上桥WH关断时,续流将沿UL和WL的反并联二极管流动,此时母线电流无输出。可见,要避开IGBT开关噪声,母线电流采样点不能选在PWM周期中关断的时间段内,那最好的选择就是时刻定在PWM导通阶段的中点[1]。在图2所示PWM输出时序图中,主通道0决定了从通道上升和下降状态,在下降状态的匹配中断触发电流采样正好对应PWM导通阶段的中点。通过实验发现,该方法可有效地减小电流值的离散度,再结合数字滤波可达到较好的效果。 数字滤波方法有很多,如中值法、平均值法、消抖滤波法、递推滤波法等。考虑到干扰的随机性,改进了递推滤波法,加入了消抖措施,并保留了递推滤波原本的抗周期性干扰的作用,提高了抗干扰能力。消抖递推滤波法如图9所示。 设置采样值的振荡范围δ,由于干扰的随机性,快速正向超出和反向超出,计数器Count向相反方向计数,使其“内耗”而难以溢出,以消除过大的随机数据。而对真实的定向变化趋势,count很快溢出,将该数据纳入数组替代最早的元素,数组的平均值即为当前电流采样值。与其他算法相比,该方法结构巧妙、运算量小、响应快,提高了采样值的平滑性。 3.3 主程序设计 主程序中,双闭环调节周期应大于霍尔测速周期,若调节周期未到则仅作电流环调节,如图10所示。在调节周期中,若堵转标志置位,控制器禁止所有调制。正常运行时,首先读取滤波后的转速给定和当前转速,根据偏差e,转速环给出相应的控制策略:偏差大,则进行开环恒流调节;偏差中等则引入比例调节;偏差很小时,则进行分段PI调节。速度环的输出作为电流的给定,通过TDR02、TDR04和TDR06中的比较值改变上桥臂的占空比,从而改变定子绕组电流,实现调速。 4 实验结果 实验所用的BLDCM参数:极对数3,额定电压220 V,额定功率400 W,额定转速3 000 r/min,对电机施加1.5 N·m负载转矩。图11为起动、运行及制动时的电流波形;图12、图13分别是给定转速200 r/min和2 500 r/min时的转速曲线图。 5 结 语 以79F9211单片机为核心,设计了针对额定电压220 V,额定功率400 W的BLDCM控制系统,对无刷直流电机控制采用了双闭环控制策略,在转速环采用了改进的积分分离的PI算法并完成对PI参数整定,分析了测量参数对系统的影响,并采用了优化的消抖递推滤波法。实验表明该系统具有良好的静态精度和动态响应,与传统的DSP控制系统相比,该系统不仅实现了良好的控制效果,而且成本也大大降低。经长期测试,该方案系统结构简单、工作稳定。 参考文献 [1] 宋超,王刚,栾宁.双闭环无刷直流电机驱动电路的设计与实现[J].现代电子技术,2013,36(4):107?110. [2] 肖儿良,翟万利,倪珍珍.一种新型的无刷直流电动机换相控制算法[J].电子技术应用,2013,39(7):50?53. [3] 钟晓伟,宋蛰存,许刚.电动自行车用无刷直流电机控制系统设计[J].电机与控制应用,2011,38(1):20?24. [4] 黄海波,兰建平,张凯.基于LPC1769芯片的无刷直流电机智能控制[J].电机与控制应用,2013,40(9):22?26. [5] 周华伟,温旭辉,赵峰,等. 一种具有预测功能的抗积分饱和PI速度控制器[J].电机与控制学报,2012,16(3):15?20. [6] 雷金莉.无刷直流电机模糊PI控制系统建模与仿真[J].现代电子技术,2012,35(6):161?163.
