小扰动机器人纵向非线性控制电路系统设计
2015-12-02柳智鑫苏波宁
柳智鑫++苏波宁
摘 要: 传统的小扰动机器人纵向非线性控制方法采用传感器通过敏感元件实现驱动器和执行系统联动控制,但控制系统容易出现非线性随机干扰失真。提出基于自校正模型参考自适应的小扰动机器人纵向非线性控制方法,利用改进后的控制算法进行电路系统设计。当小扰动机器人纵向非线性控制系统受到随机干扰作用时,根据自适应多通道加权控制律,机器人非线性控制系统的测量误差按指标随时调整控制器参数权重,给出合适的控制信号,在机器人的执行控制系统中设置一个初始权值,参考模型并联于被控系统,在伺服控制中采用最小方差法确定控制规律,实现机器人的纵向非线性控制,最后进行PCB电路板的设计。实验和调试结果表明,采用该系统能有效实现对机器人的非线性控制,控制品质和精度较高,收敛性和稳定性较好。
关键词: 机器人; 非线性控制; 电路系统; 小扰动
中图分类号: TN710?34; TP391.4 文献标识码: A 文章编号: 1004?373X(2015)22?0122?04
0 引 言
机器人是现代工业与信息化高度发展的产物,其是通过人工智能操作实现自动控制,代替人类进行相应难度的作业操作,而今,机器人在野外作业、极地科考、太空探测和水下探测等领域都有重要的应用价值。机器人由控制单元、驱动装置和传感装置等主要部分组成,按照设定的位置、速度和加速度,进行相关的环境作业和外界信息感知。其中,机器人的控制系统和机器人系统的核心,机器人的作业环境相对较为复杂,需要设计有效的机器人控制方法,提高机器人的行为控制精度。本文研究小扰动机器人的纵向控制问题,小扰动机器人的运动幅度不大但控制精度较高,广泛应用在精密控制环境,对小扰动机器人的纵向运动非线性控制是保证机器人稳定可靠动作的关键,研究小扰动机器人的控制方法具有重要意义[1]。
机器人的控制和运动规划问题是一个具有多种约束的运动规划问题,传统的控制方法采用传感器通过敏感元件实现驱动器和执行系统联动控制,但控制系统容易出现非线性失真[2]。对此,相关的文献进行了机器人控制系统的改进设计,其中,文献[3]提出一种基于神经网络的强化学习的机器人运动轨迹跟踪控制方法,采用DSP芯片进行电路设计,但是该控制系统对机器人的纵向路径规划和自主定位性能不好。文献[4]设计一种具有声电转换和姿态控制的机器人控制执行系统,主要包括基阵、收发转换和功率放大器等部分,通过控制信号将开关接通在发射信号端实现机器人非线性控制,提高系统的稳定性,但该控制系统在进行模拟信号预处理时受到的干扰较大[5]。针对上述问题,本文提出一种基于自校正模型参考自适应控制的小扰动机器人纵向非线性控制算法,在算法改进设计的基础上,进行机器人控制系统设计,控制系统的改进主要体现在控制执行单元设计误差补偿器,使机器人纵向非线性控制系统的稳态误差控制在较小的幅度内,最后通过仿真实验进行了性能验证,展示了本文设计的控制系统在提高小扰动机器人的非线性控制精度和品质方面的优越性,展示了较好的应用价值。
1 系统总体构成及控制算法描述
1.1 小扰动机器人纵向非线性控制系统的总体构成
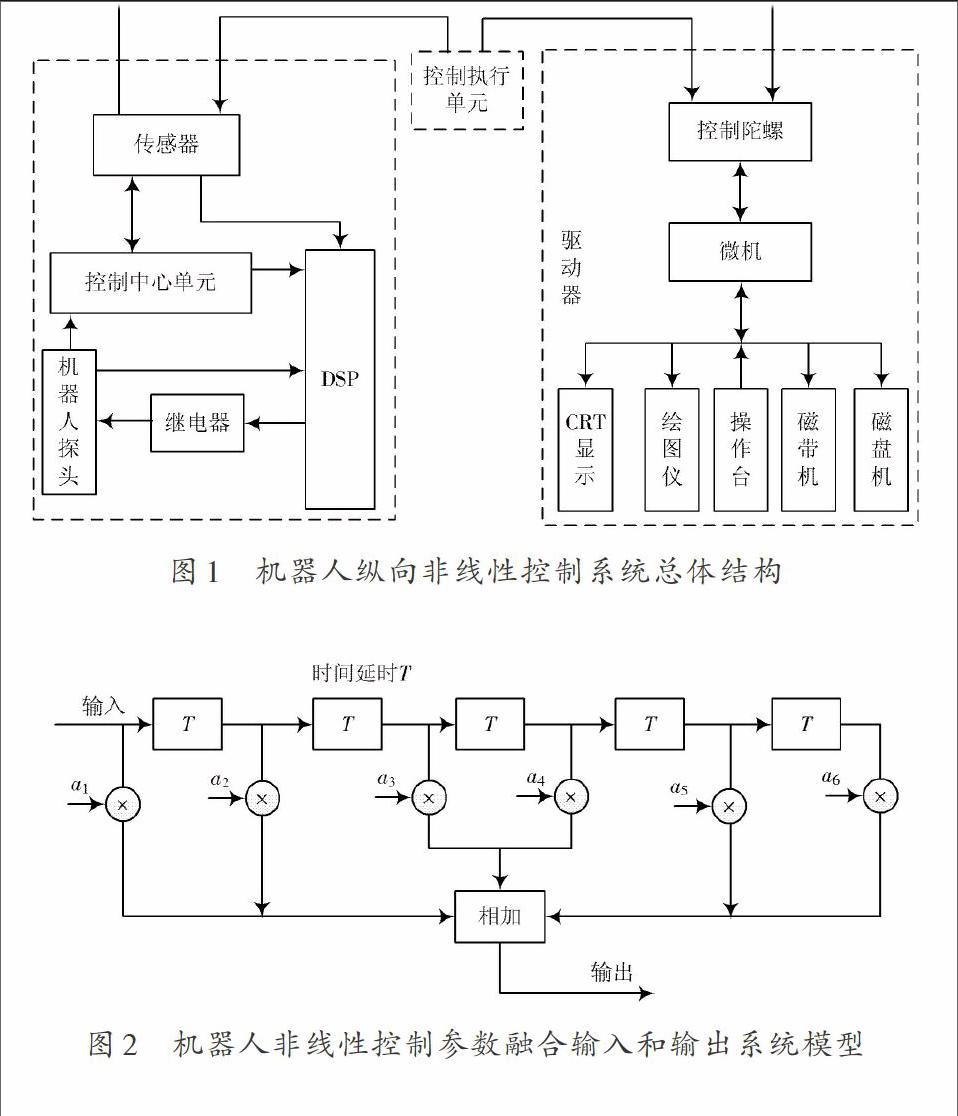
小扰动机器人纵向非线性控制系统主要由感知系统、驱动器和执行器系统、以及控制中心单元等子系统组成。其中,感知系统指由感知原件组成的供小扰动机器人纵向非线性控制系统获取外界信息的感知器件即传感器,通过对外界信息的感知实现有用信息的输入,供中枢神经系统即小扰动机器人纵向非线性控制系统的控制中心单元处理,为控制执行单元提供执行指导。传感器通过敏感元件和换能器实现信号的检测和输入,驱动器和执行系统是小扰动机器人纵向非线性控制系统的输出机构,它由控制陀螺、继电器、电磁阀等组成,小扰动机器人纵向非线性控制系统的控制中心单元是系统的中枢神经,它相当于人的大脑,向控制系统发出控制指令,使得整个机器人控制系统按既定的方案运转[6?7]。中心控制单元处理器有单片机、DSP、ARM等,综上描述,得到机器人纵向非线性控制系统总体结构组成如图1所示。
在上述总体结构描述的基础上,研究小扰动机器人纵向非线性控制原理,机器人纵向非线性控制执行单元通过系统本身与外界的数据传输和通信来改善和调整统自身的姿态信息,非线性控制也就是一种反馈控制,考虑机器人控制系统的非线性特性和不确定性,机器人的跟踪控制问题一般由[n]个决策变量的多信息融合模型构成,自适应小扰动机器人纵向非线性控制的参数融合输入和输出系统模型如图2所示。图中,输入参数为[u(n)],[w*0]…[w*M],输出变量为[y(n)],表示机器人的姿态量化特征。
1.2 控制算法改进设计
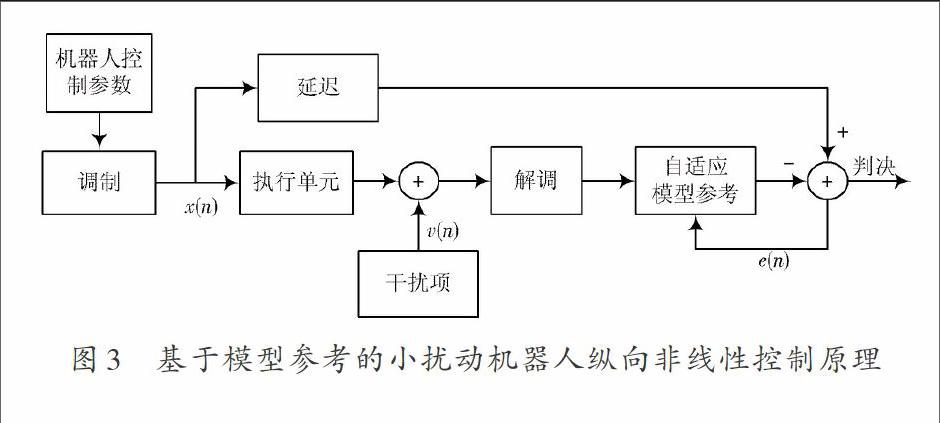
在上述进行机器人控制系统模型总体设计的基础上,需要进行控制算法优化设计。作为整个机器人控制系统的核心软件组成,基于自校正控制原理,本文提出一种基于自校正模型参考自适应控制的小扰动机器人纵向非线性控制算法。算法原理描述为:当小扰动机器人纵向非线性控制系统受到随机干扰作用时,根据自适应多通道加权控制律,机器人非线性控制系统的测量误差按指标随时调整控制器参数权重,给出合适的控制信号,基于控制品质在机器人的执行控制系统中设置一个动态品质良好的初始权值,参考模型并联于被控系统,在伺服控制中采用最小方差法确定控制规律,实现机器人的纵向非线性控制。控制原理如图3所示。
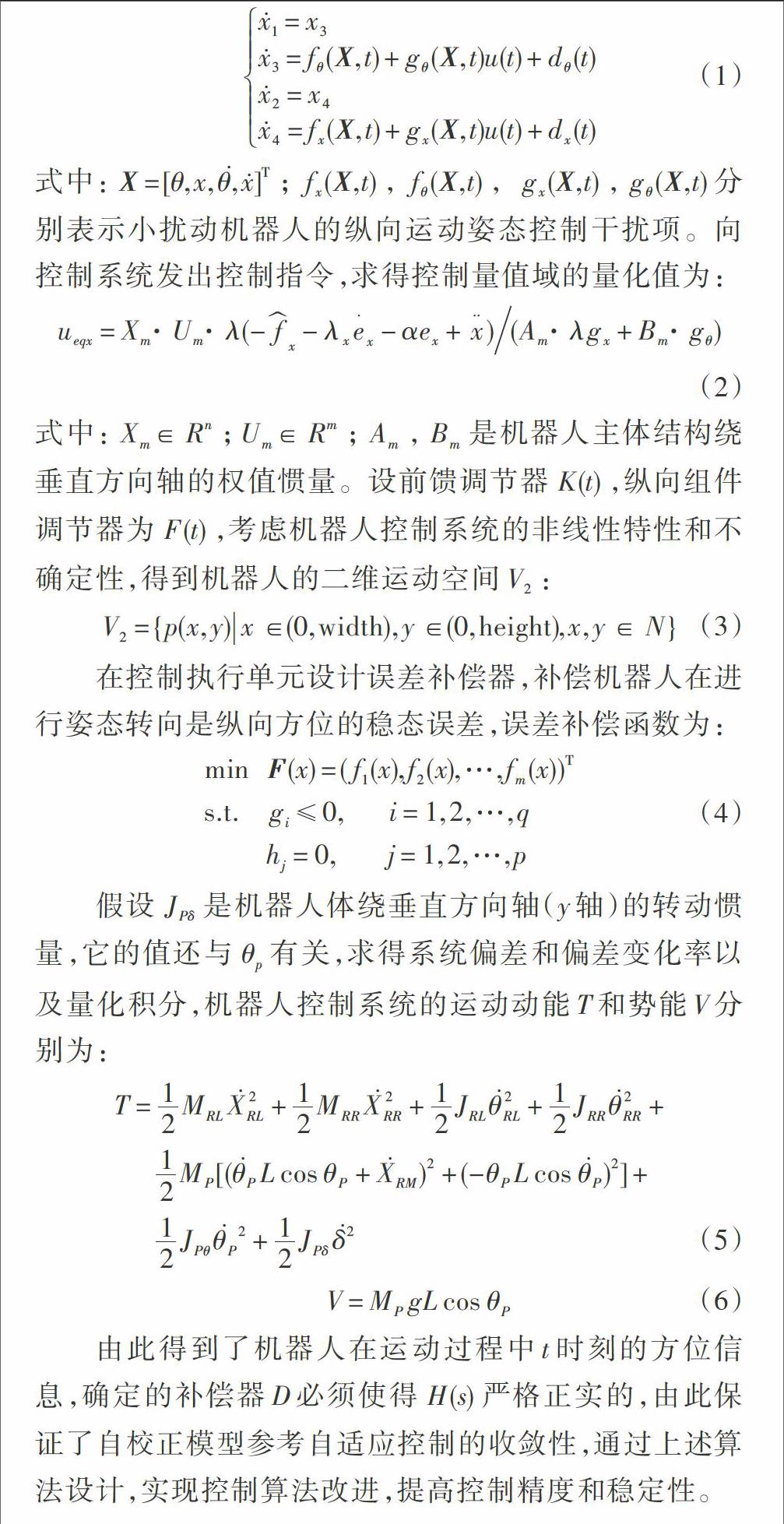
结合图3,机器人的输入控制参数采用一个随机信号发生器,通过对控制信道的调制解调,进行干扰抑制,使得被控制系统的动态特性与模型相一致,设定小扰动机器人控制系统的状态方程为:
2 系统硬件电路设计
在上述控制算法改进设计的基础上,将算法嵌入到DSP芯片中,进行小扰动机器人的控制系统硬件电路设计。硬件电路设计中,根据小扰动机器人控制系统的应用目标确定系统的性能指标、DSP信号处理的要求,通常可用数据流程图、数学运算序列进行总体设计,控制系统的数字信息处理芯片采用TMS320VC5509A DSP芯片,该芯片为低功耗16位定点DSP,运行在200 MHz的主频范围之内,比较适合机器人控制环境的应用需求。系统的A/D模块主要完成输入模拟信号到数字信号的转换,另外包括时钟发生器,将接收到的输入时钟变换为CPU及其外设所需要的工作时钟。小扰动机器人纵向非线性控制系统的DSP板电源电路用外部电源给整个系统供5 V和±12 V的电压,电源芯片选用TPS767HD301,为整个控制系统提供1.5~1.6 V的可调电压和3.3 V的固定电压。DSP时钟可由外部提供,也可由板上的晶振提供。选择EM B380C作为接口芯片,接口电路框图如图4所示。
在非线性控制系统的干扰滤波部分,采用MAX264滤波器,内部有两个独立的二阶滤波器,可通过级联实现高阶滤波器。输入时钟频率可以利用片内时钟外接晶体产生晶振频率进过内部电路进行2分频。对[M0],[M1]两个管脚编程可使芯片工作于模式1~4四种方式,每一种工作方式都能实现滤波输出。经过DC?DC变换为5 V,再由5 V的直流经过DC?DC得到3.3 V和4.2 V电压,实现控制系统的自校正模型参考自适应控制滤波。
图5中,通过开关的关断或接通来控制滤波器模式的选择。滤波器的工作时钟可通过DSP的时钟分频进行小扰动机器人的纵向非线性控制。以此为基础,在控制执行单元设计误差补偿器,使机器人纵向非线性控制系统的稳态误差控制在较小的幅度内。在原理图的设计完成后,则可以进行PCB的设计,最后通过本文的改进设计,得到小扰动机器人纵向非线性控制系统电路PCB图如图6所示。
图6中,包括了控制系统的DSP数字处理芯片的电路PCB板图和控制器数据采集板PCB图,PCB板的制作完成之后,便可进行硬件的装配及调试和系统仿真。
3 系统仿真实验结果分析
在上述进行了小扰动机器人纵向非线性控制系统电路设计的基础上,进行系统的调试和仿真实验分析,验证本文系统在实现机器人控制中的可靠性能。与文献[7]的方法进行对比分析,硬件调试过程中需要的设备包括电源、DSP硬件开发环境,如PC机、硬件仿真器、软件开发工具等,根据本系统设计要求,采用模型参考小扰动机器人纵向非线性控制算法,采用嵌入式算法设计,把软件算法输入到相关控制系统中,进行系统的调试分析。系统仿真调试的工具还包括万用表、示波器、逻辑分析仪和信号源等。仿真器是合众达公司的SEED?XDSUSB 2.0,该仿真器采用JTAG接口,所以可以方便地进行调试。控制算法的实现采用的是C语言进行算法的仿真。
在上述仿真环境设定的基础上,对小扰动机器人纵向非线性控制系统的俯仰、偏航和纵向追踪等三个通道单独进行控制仿真测试。运用文献[7]的方法和本文的方法进行对比,在示波器上分别输出的控制信号波形如图7所示。从图可见,采用本文设计的系统,输出的控制信号的权值的稳定性提高幅度较大,大约提高30%,与延时的采样点相同,能有效实现对小扰动机器人的非线性控制。最后对在逻辑分析仪上对控制系统的控制误差进行分析,不同方法得到误差结果如图8所示。从图8结果可见,虽然小扰动机器人的运动幅度不大,但采用本文设计的系统能准确实现对机器人的纵向运动的非线性伴随控制,由于本文系统控制执行单元设计误差补偿器,使机器人纵向非线性控制系统的稳态误差控制在较小的幅度内,精度较高,避免了非线性失真,展示了本系统的优越性能。
4 结 语
本文研究了小扰动机器人的纵向控制问题,小扰动机器人的运动幅度不大但控制精度较高,广泛应用在精密控制环境,对小扰动机器人的纵向运动非线性控制是保证机器人稳定可靠动作的关键,提出一种基于自校正模型参考自适应控制的小扰动机器人纵向非线性控制算法,在算法改进设计的基础上,进行机器人控制系统设计,控制系统的改进设计主要体现在于控制执行单元设计误差补偿器,使机器人纵向非线性控制系统的稳态误差控制在较小的幅度内,实验结果表明,采用本文系统能有效实现对机器人的非线性控制,控制品质和精度较高,展示了较好的实际应用价值。
参考文献
[1] 赵威.基于鱼雷自导的舰船尾流回波模型建立方法[J].舰船电子工程,2013,33(4):81?83.
[2] 邓异,梁燕,周勇.水声换能器基阵信号采集系统优化设计[J].物联网技术,2015,5(4):36?37.
[3] 杨兴明,余忠宇.两轮移动倒立摆的开关切换模糊极点配置控制器设计[J].电路与系统学报,2012,17(4):58?62.
[4] 邹胜宇,刘振,高海波,等.基于干扰力时间积分的悬吊漂浮物随动控制方法[J].机器人,2015,37(1):1?8.
[5] 周勇,甘新年,胡光波,等.鱼雷制导控制系统多通道控制加权算法设计[J].现代电子技术,2014,37(19):14?17.
[6] 索中英,程嗣怡,袁修久,等.优势决策信息系统规则获取方法及应用[J].兵工学报,2015,26(3):539?544.
[7] 杨大为,丛杨,唐延东.基于结构化的加权联合特征表观模型的目标跟踪方法[J].信息与控制,2015,44(3):372?378.
[8] 易鸿.一种非线性系统自适应跟踪控制器设计[J].现代电子技术,2013,36(6):7?9.
