不确定网络化控制系统的非脆弱容错镇定
2015-12-02智月明
智月明, 姜 顺, 潘 丰
(江南大学轻工过程先进控制教育部重点实验室,江苏无锡214122)
网络化控制系统(Networked Control System,NCS)是指通过一个实时网络构成闭环控制系统,具体是指利用某个区域内一些现场检测、控制及操作设备与通信线路,用以提供设备之间数据传输的集合,使该区域内不同地点的用户实现资源共享和协调操作[1]。在工程实践中,由于网络化控制系统的承载能力和服务能力的限制,使数据传输不可避免地受到各种干扰,会引起丢包、时延、网络堵塞等问题,导致整个网络化控制系统性能的下降甚至不稳定[2]。另外,由于环境的变化、元器件非线性以及外界干扰等因素的影响,系统的参数会发生变化,系统的不确定性是不可避免的[3],而不确定性会破坏系统的动、静态性能;情况严重时,可能会导致系统的不稳定。因此在网络化控制系统的分析与综合中应该尽可能考虑扰动对于整个系统的影响。
文献[2-6]针对存在时延和丢包的NCS,采用状态反馈控制策略分别研究了主动容错控制、鲁棒完整性、鲁棒H∞保性能容错和滤波器等问题。文献[7]研究了在执行器和传感器发生随机故障时,根据已知故障取值的期望和方差设计确定性的控制器使得系统保持稳定。文献[8]针对具有时变时延的不确定网络控制系统,基于时延依赖稳定条件,对存在执行器失效情况的闭环网络控制系统进行了完整性设计。上述容错控制文献中研究了固定的控制器,但有一定局限性。考虑到控制器受外界情况的影响也会产生一些变化,采取非脆弱镇定显得十分重要,能使系统迅速保持稳定。
文献[9-11]分别研究了NCS具有非脆弱H∞抗干扰性能、非脆弱保性能、非脆弱H∞保性能的充分条件,这些研究仅限于无故障系统。文献[12]针对执行器饱和状况,研究了非脆弱鲁棒容错控制。文献[12]研究的是连续的NCS系统,对离散系统的执行器发生随机故障没有涉及。文中主要研究离散型的NCS系统,综合考虑了时延、执行器发生随机故障、系统参数不确定性以及未知扰动,利用线性矩阵不等式(Linear Matrix Inequality,LMI)方法设计了非脆弱容错控制器,使得系统性能保持稳定,最后利用仿真算例验证了文中设计的控制器的有效性。
1 系统描述
考虑不确定性和时延,则被控对象的状态方程为

其中,x(k)为状态向量,u(k)为控制输入量,A,B为具有适当维数的常数矩阵,假设(A,Bi),i=0,1可镇定,因为诱导时延的不确定性,这里用不确定项ΔA,ΔB代替;同时ΔA,ΔB也包括了系统参数因外界影响而变化引起的摄动,u(k-1)表示网络传输采用一步时延。采取状态反馈控制器为

其中,K∈Rm×n是状态反馈增益阵。再考虑到扰动,则闭环系统为

设定ΔA,ΔB有界,假定其具有以下形式:
式中:D,E,Di,Ei为已知常数矩阵;F(k)为满足以下条件的未知不确定矩阵,其元素Lebesgue可测且有界

为了描述执行器的可能故障,引入故障矩阵M,其形式为
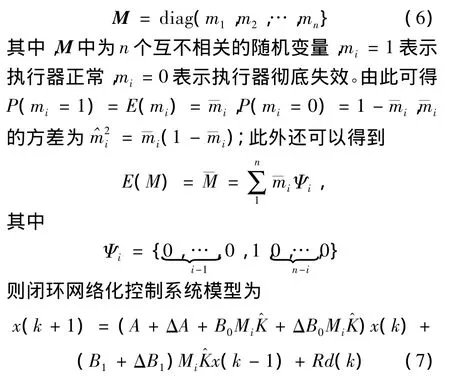
则基于状态反馈的容错控制器设计任务为:设计状态反馈控制器(2),使带有时延和扰动的闭环系统(7),对执行器发生的随机故障M(M=0除外)均保持渐进稳定。
2 控制器设计
引理1[13]给定合适维数矩阵 Q=QT,H,E,对任意满足FTF≤I的F使

的充分必要条件是存在ε>0,使得

对任意故障矩阵Mi∈Ω均成立,则闭环系统(7)渐进稳定。
证 构造如下的Lyapunov函数:

3 仿真实例


为了说明文中设计的非脆弱容错控制器的有效性,下面分4种情形进行说明。
情形1:图1表示执行器未发生故障的情况下,原开环系统的状态响应,这里初始状态取为x(0)=[3,1]T。
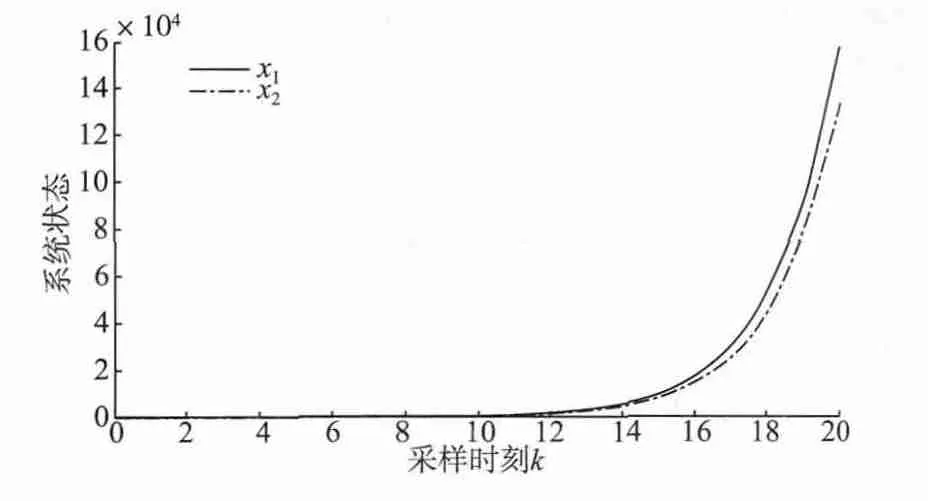
图1 第1种情形的系统开环状态响应Fig.1 First case of the open-loop system response
由仿真曲线可知,状态趋近于无穷,所以原开环离散系统是不稳定的。
情形2:执行器1和执行器2完好的期望为1,即执行器正常。
根据定理1求得相应的控制器参数为求得控制器为
应用情形1里面的初始条件,系统的状态响应如图2所示。
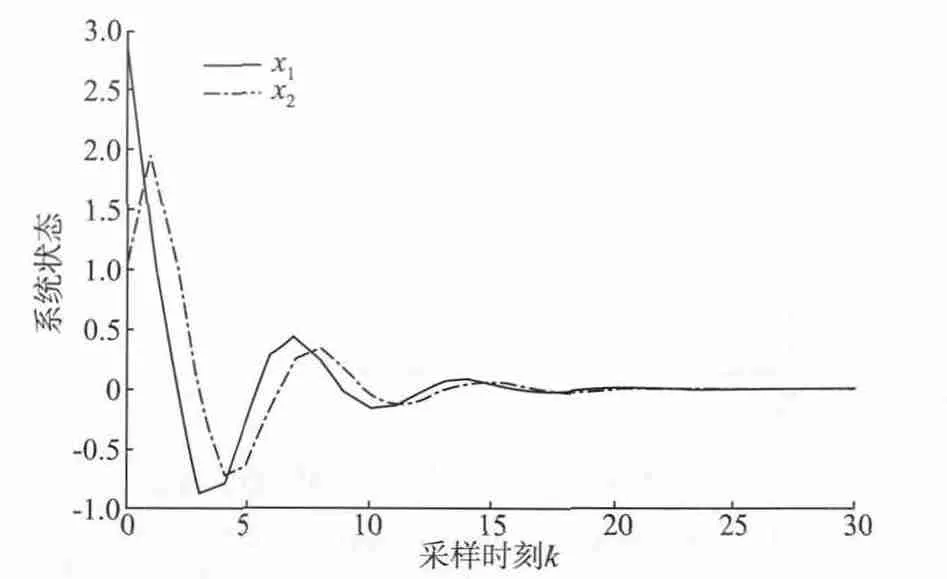
图2 第2种情形的系统闭环状态响应Fig.2 Second case closed loop system response
情形3:执行器1和执行器2发生随机故障的期望都为0.5,即执行器1和执行器2正常的可能性分别为50%。

根据定理1求得相应的控制器参数为求得控制器为
得到相应的系统状态如图3所示。

图3 第3种情形的系统闭环状态响应Fig.3 Third case closed loop system response
情形2中执行器发生随机故障的期望是情形3中的2倍,而求解得到的控制器约为情形3中的0.5倍。因此,图2和图3的故障状态不同,但是仿真曲线相似。
情形4:执行器1完好的期望为1,即执行器1正常,执行器2完好的期望为0,即执行器2完全失效。

根据定理1求得相应的控制器参数为求得控制器为
得到相应的系统状态如图4所示。
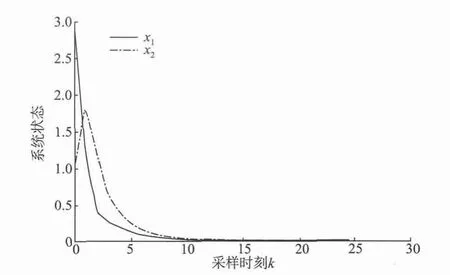
图4 第4种情形的系统闭环状态响应Fig.4 Fourth case closed loop system response
由仿真曲线图2~图4可知,系统的状态响应曲线最终趋向于零,说明执行器发生随机故障时闭环系统加入控制器后是渐进稳定的。因此,文中所设计的非脆弱容错控制器能够对执行器发生随机故障具有完整性,能使系统渐进稳定,说明设计控制器的有效性和可行性。
4 结语
主要研究了不确定网络化控制系统存在未知扰动、执行器故障和时延的非脆弱容错控制。在典型故障状况下,用Schur引理、LMI技术求解出容错控制器;对于执行器发生的故障,控制器都能使系统保持稳定性,给出的实例说明提出方法的有效性和实用性。目前,非线性网络化控制系统研究较少,针对具有非线性且存在时延和丢包的网络化控制系统,在执行器发生随机故障下,设计非脆弱H∞容错控制器和非脆弱H∞容错保成本控制器是值得研究的问题。
[1]LIAN Fengli.Network design consideration for distributed control systems technology[J].IEEE Transactions on Control System Technology,2002,10(2):297-307.
[2]黄鹤,韩笑冬,谢德晓,等.具有数据包丢失的网络控制系统主动容错控制[J].控制与决策,2009,24(8):1126-1131.HUANG He,HAN Xiaodong,XIE Dexiao,et al.Active fault-tolerant control for networked control systems with packet dropout[J].Control and Decision,2009,24(8):1126-1131.(in Chinese)
[3]郑英,方华京.不确定网络化控制系统的棒容错控制[J].西安交通大学学报,2004,38(8):804-807.ZHENG Ying,FANG Huajin.Robust fault tolerant control of networked control system with time-varying delays[J].Journal of Xi'an Jiaotong University,2004,38(8):804-807.(in Chinese)
[4]李炜,王艳飞.一种少保守性的NCS鲁棒H∞保性能容错控制[J].控制与决策,2011,26(12):1768-1776.LI Wei,WANG Yanfei.A less-conservative robust H∞guaranteed cost fault-tolerant control of networked control system[J].Control and Decision,2011,26(12):1768-1776.(in Chinese)
[5]ZHANG D,SU H Y,PAN S,et al.LMI approach to reliable guaranteed cost control with multiple criteria constraints:the actuator faults case[J].International Journal of Robust and Nonlinear Control,2009,19(8):884-899.
[6]HE X,WANG Z,ZHOU D.Robust H∞filtering for time-delay systems with probabilistic sensor faults[J].IEEE Signal Processing Letters,2009,16(5):442-445.
[7]TIAN Engang,PENG Chen,GU Zhou.Fault tolerant control for discrete networked control systems with random faults[J].International Journal of Control,Automation,and Systems,2013,10(2):444-448.
[8]郭一楠,张芹英,巩敦卫,等.一类时变时延网络控制系统的鲁棒容错控制[J].控制与决策,2008,23(6):689-692.GUO Yinan,ZHANG Qingying,GONG Dunwei,et al.Robust fault-tolerant control of networked control systems with time-varying delays[J].Control and Decision,2008,23(6):689-692.(in Chinese)
[9]ZHU Junwei,LI Yanping,CHE Weiwei.Non-fragile H∞control for networked control systems with quantization and time-delays[C]//Proc of the 2011 Chinese Control and Decision Conf.Sichuan,Mianyang:[s.n.],2011:4276-4280.
[10]于水情,李俊明.变采样周期网络控制系统的非脆弱保性能控制[J].系统工程与电子技术,2011,33(4):856-861.YU Shuiqing,LI Junming.Non-fragile guaranteed cost control for networked control systems under variable-period sampling[J].Systems Engineering and Electronics,2011,33(4):856-861.(in Chinese)
[11]ZHANG Hongkai,FANG Qiansheng,WANG Xiaolong,et al.Non-fragile guaranteed-cost robust control for a class of nonlinear networked control systems with long time-delay[C]//Proc of Int Conf on Intelligent Computation Technology and Automation(ICICTA).Piscataway:IEEE Computer Society,2010:784-787.
[12]曹慧超,李炜.执行器饱和不确定NCS非脆弱鲁棒容错控制[J].控制与决策,2013,28(12):1874-1883.CAO Huichao,LI Wei.Non-fragile robust fault-tolerant control for uncertain NCS with actuator saturation[J].Control and Decision,2013,28(12):1874-1883.(in Chinese)
[13]XIE L H.Output feedback H∞control of systems with parameter uncertainty[J].International Journal of Control,1996,63(4):741-750.