基于TMR检测的遗传BP神经网络车辆分类算法
2015-12-02薛凌云谢作孟
薛凌云,谢作孟
(1.杭州电子科技大学生命信息与仪器工程学院,浙江 杭州310018;2.杭州电子科技大学自动化学院,浙江 杭州310018)
0 引 言
随着车辆数量的快速增长,交通拥堵日益严重。在现有道路的条件下,提高交通控制和管理水平势在必行。在交通控制和管理中,车辆检测、分类、流量统计是最基础的工作。目前,已有很多地磁信号车辆分类算法。其中,模板匹配算法易于实现但计算量大、精度不高[1-2],模糊模式识别算法计算量少但识别准确率依赖于专家经验、置信度不高[3],反向传播(back propagation,BP)神经网络算法计算量小、分类准确率高但训练时间长、收敛速度慢、易陷入局部最小[4-6]。本文鉴于隧道磁电阻(Tunnel Magneto Resistance,TMR)磁传感器具有体积小、抗干扰能力强、安装维护方便等优点[7],采用TMR 磁阻传感器获取车辆基本信息,对采集的数据进行归一化、去噪处理,提取其特征后,针对BP神经网络算法的不足,提出遗传优化的BP神经网络(Genetic Algorithms-Back Propagation,GA-BP)车辆分类算法,即采用遗传算法[8-10]优化BP神经网络的初始权值和阈值,以解决BP 网络易陷入局部最小、收敛速度慢等问题,最后用BP神经网络对车辆进行分类,提高了准确率和收敛性。
1 样本数据采集和预处理
1.1 样本数据采集
选取斯柯达三厢轿车、奥迪Q5 SUV和长城皮卡作为实验车辆,将TMR 车检器安置在道路中央,使实验车辆在TMR 车检器正上方通过,数据采集方式如图1所示。
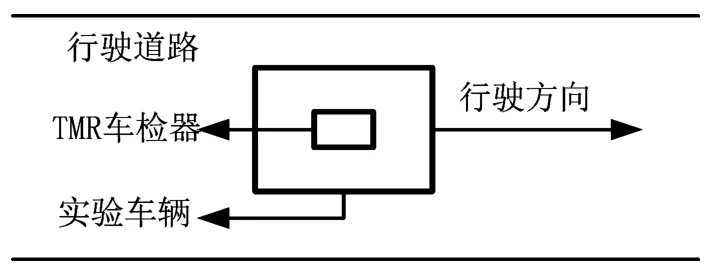
图1 数据采集示意图
1.2 样本数据预处理
设O(t)是t时刻的检测信号,M(t)是t时刻被测车辆引起的磁场变化信号,B(t)是t时刻背景磁场信号,N(t)是t时刻噪声信号。则O(t)表述为:

背景磁场信号B(t)的存在必然会影响信号的处理,首先去除背景磁场。由于车辆经过TMR 车检器时,检测信号的幅值随着车辆速度不同而不同。因此,再对信号进行归一化处理。

式中,X(t)为去除背景磁场后的信号,Y(t)为归一化后的信号,Xmax为信号强度最大值,Xmin为信号强度最小值。
噪声N(t)的存在影响信号特征的选取和分类结果。因此采用滑动均值滤波去除噪声,如下式:

式中,Y(t)为归一化后的信号,F(t)为归一化和去噪后的信号。m 取10,即窗口长度为10。
检测信号经归一化、去噪处理后如图2所示。图2(a)、图2(b)、图2(c)分别为三厢轿车、Q5 SUV、长城皮卡的数据预处理结果,可见处理后去噪去噪效果良好,并能较好地反映原始数据特征。
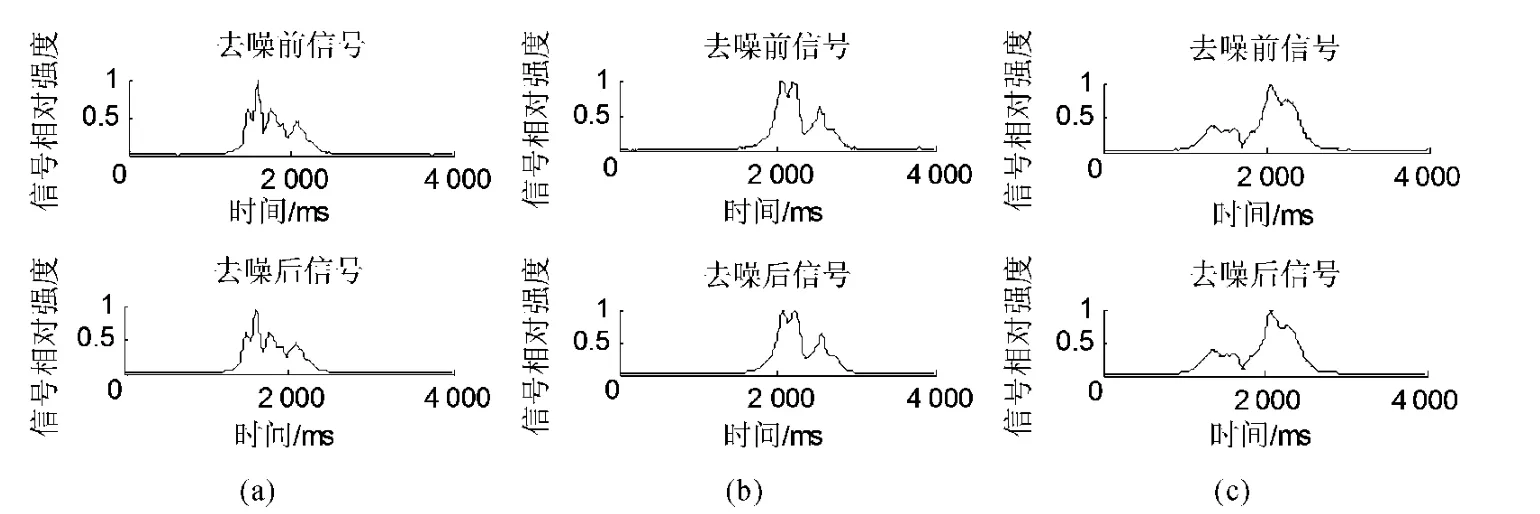
图2 车辆去噪前后数据对比图
2 特征选取
不同车辆底盘距地面高度、发动机位置、车辆长度、车轮轴位置等造成检测数据的差异。本文以有效波段(即图2波形中间不为0的波段)均值、均方差、峰值个数、最小波谷值表征不同车辆检测数据的差异,并以此为特征对车辆进行分类。经统计分析,利用t 分布来确定各项车辆的特征取值范围,其中每类数量为100,α 取0.05。不同类别车辆特征的取值范围如表1所示。

表1 不同车辆特征范围
3 识别算法设计
首先通过数据提取特征输入量和分类输出量确定BP 网络的拓扑结构,然后运用遗传算法优化BP网络起始权值及阈值,最后利用BP 网络对车辆数据仿真分类,得到结果。
3.1 BP神经网络模型构建
BP神经网络车辆分类模型由输入层、输出层和一个隐层组成,根据车辆特征选取的个数和车辆分类类别个数,分别确定输入层神经元个数是4和输出层神经元个数是3。本文分类模型中只设置一个隐层,隐层节点数计算如下:

隐层神经元个数为4。式中,Nhidden、Nclass、Nin、Nout分别表示隐层神经元、目标分类数、输入层神经元、输出层神经元数量。同时设定网络训练目标误差ε <1e-5,训练步长为100。因此,网络的拓扑结构如图3所示。图3中Xn、Vif、Wjk、Ym分别为输入层输入量、连接输入层和隐含层的权值、连接隐含层和输出层的权值、输出层输出量。
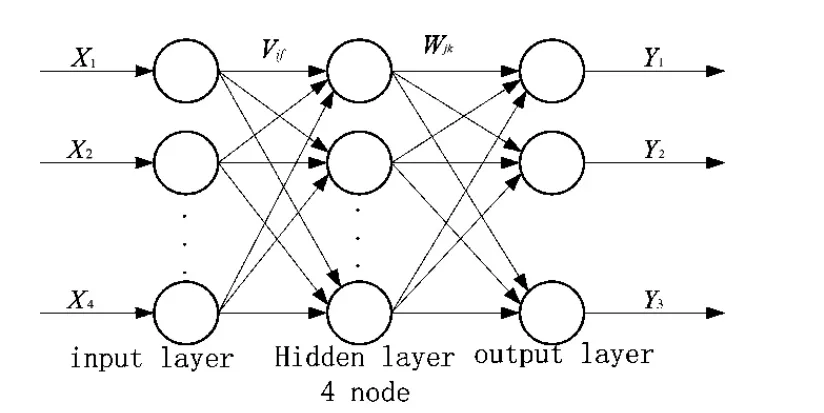
图3 BP神经网络拓扑结构图
3.2 BP 网络权值和阈值优化
3.2.1 种群初始化
产生20个初始串结构数据,每个串结构数据即为一个个体。设定最大进化代数G=100,即算法最多经过100次遗传操作就终止进化。个体编码方法采用实数编码,每个个体包括输入层与隐含层连接权值、隐含层阈值、隐含层与输出层链接权值和输出层阈值4部分。编码长度l 由BP 网络结构决定,即l =i×j+j×k+j+k。其中,i,j,k分别为输入层节点、隐含层节点、输出层节点。因此,本文中l为35。
3.2.2 适应度函数设计
适应度值反映群体中个体性能的优劣。本文选取数据误差平方和的倒数作为适应度函数:

式中,T'={t1' t2' … ti'}为训练数据的预测值,为输出的类别标签;T={t1t2… ti}为训练数据的真实值,为实际的类别标签;i为训练数据的样本数目。
3.2.3 遗传操作
遗传操作包括选择操作、交叉操作和变异操作3部分。根据每个个体适应度值进行选择、交叉和变异操作后,得到下一代个体。再计算新个体的适应度值,如进化次数未达到要求或未找到最优适应度值。继续选择、交叉和变异操作,直到训练目标达到要求为止。
最后,将获得的优化权值和阈值赋予BP神经网络进行训练。
4 实验结果分析
参考中国汽车分类标准(GB9417-87),选取斯柯达三厢轿车、奥迪Q5 SUV、长城皮卡为实验对象,每种车辆各采集100组数据,共300组数据。取150组车辆数据为训练数据,另150组车辆数据作为测试数据。分别利用BP神经网络算法和遗传BP神经网络算法进行仿真。各种车辆分类准确率如表2所示。
由表2可知,与BP算法相比,GA-BP算法的车辆分类准确率大幅提高。BP算法平均准确率为77.3%,GA-BP算法平均准确率为92.0%。同时,得到BP算法和GA-BP算法收敛曲线如图4所示。在取相同的训练步长100时,GA-BP算法比BP算法更快的达到目标效果,收敛性更好,获得的全局误差更小,也进一步验证GA-BP算法较BP算法具有更高的分类准确率。

图4 BP与GA-BP误差收敛曲线
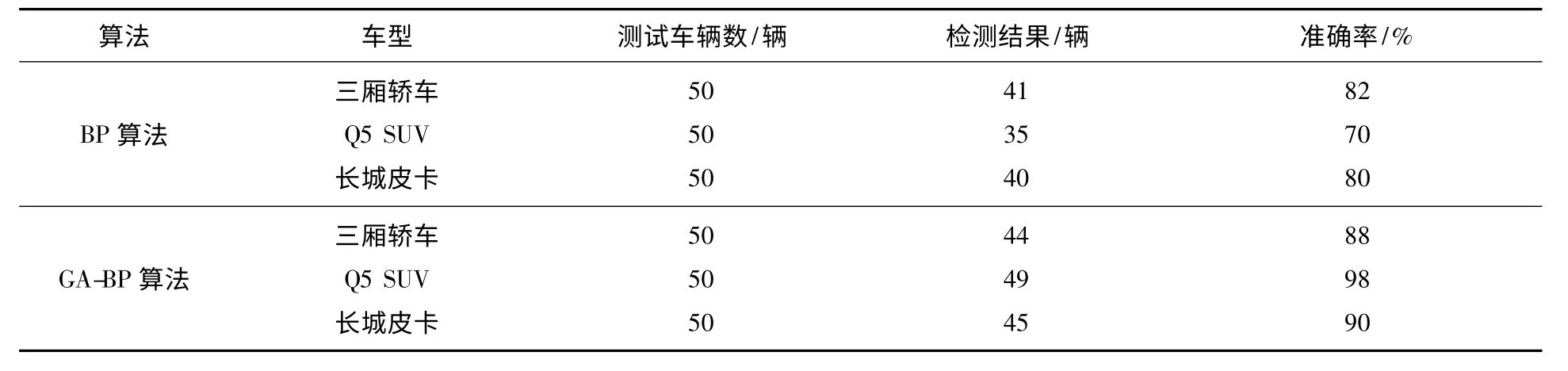
表2 车辆识别准确率
5 结束语
本文设计了GA-BP 车辆分类算法。分析了BP神经网络算法的缺点,并在其基础上结合GA算法的优势,提出GA-BP 车辆分类算法。实验仿真结果表明,利用GA算法优化后的BP神经网络车辆分类算法的分类准确性和收敛性都得到了一定的提高,具有很好的应用价值。
[1]樊海泉,董德存.基于模式匹配算法的车型识别研究[J].微型电脑应用,2002,18(4):20-21.
[2]周丰,王明哲,倪枫.基于传感器的行驶车辆检测分类算法[J].计算机应用研究,2010,27(7):2533-2535.
[3]吴皓.基于地磁的车辆检测系统与识别算法研究[D].武汉:华中科技大学,2007:32-36.
[4]张伟,谭国真,丁男,等.基于邻接传感器及神经网络的车辆分类算法[J].通信学报,2008,29(11):139-144.
[5]Zheng X,Fu J.Performance Compensation of GMR-based Magnetic Azimuth Measurement[C]//Control and Decision Conference (CCDC),2012 24th Chinese.Taiyuan:IEEE,2012:3273-3276.
[6]杨波,尼文斌.基于异向性磁阻传感器的车辆检测与车型分类[J].仪器仪表学报,2013,34(3):537-544.
[7]吕华,刘明峰,曹江伟,等.隧道磁电阻(TMR)磁传感器的特性与应用[J].磁性材料及器件,2012,43(3):1-4.
[8]Wang X F,Wang H K.Heavy Metal Pollution Analysis in Topsoil Based on BP and GA[J].Applied Mechanics and Materials,2012,246:571-575.
[9]Kang R Q,Li X S,Wang H J.Vehicle Type Recognition Using in Geomagnetic Data Based on Neural Network[J].Applied Mechanics and Materials,2013,313:1380-1384.
[10]王路,吴国平.基于遗传神经网络的油气识别[J].工程地球物理学报,2008,5(2):169-172.
