基于激光投射视觉处理的水下测距技术研究
2015-12-02蔡文郁衡靓靓杨俊毅
蔡文郁,衡靓靓,杨俊毅,李 竹
(1.杭州电子科技大学电子信息学院,浙江 杭州310018;2.国家海洋局第二海洋研究所,浙江 杭州310012)
0 引 言
随着科技的飞速发展,人类对海洋的探索也逐渐深入,测绘学科作为工具学科,已成为海洋资源探索的有力手段。由于海洋水体环境异常复杂,在水下实现距离测量或地形测绘面临着比陆地测距更大更多的困难[1]。目前应用较为广泛的水下测距与成像技术[2]主要有水下激光测距、水下超声波测距、水下微波雷达测距、水下视觉测距等,除了水下视觉测距系统以外,其余几种水下测距系统的价格都异常昂贵[3]。近几年来,发展迅速的图像视觉处理技术为海底地形测绘提供了巨大的技术支持,使高精度、高效率的水下测距成为了可能[4]。对于各种深海探测与取样设备的投放过程,必须配置水下测距工具辅助完成,如果能实时获取设备与海底之间的距离,就可保证其在投放过程中免受到落体撞击、触底的损坏。目前安装在深海探测与取样设备离底测距系统一般采用深海高度计,但是深海高度计价格异常昂贵。因此,探索新的非接触式水下测距技术,具有十分重要的必要性[5]。基于图像视觉处理的测距系统是测距技术在机器视觉领域的创新性应用,已经体现出了极大的优越性[6]。在水下视觉系统中,水下测距及成像系统发展迅速,已应用于水下搜索援救、目标跟踪识别等工作[7]。但是,基于数字图像处理的水下测距系统仍处于研究阶段,多种算法和技术的优劣,亟待比较探讨。
在陆地上的测距领域,基于视觉原理的测距已经有较多的研究,文献[8]研究了激光三角测距方法,文献[9]研究了一种双目立体视觉测距算法和系统,但是这些研究并未考虑到水下测距的实际应用背景。本文利用激光投射成像、图像视觉处理、测距模型分析等关键内容的研究,对基于激光投射视觉处理的水下测距技术展开算法研究和实验验证,从摄像头拍摄的激光点图像获得水下测距结果,并分析其可靠性和适用性。
1 系统框架
本文研究的基于激光投射视觉处理的水下测距系统包括激光发射器、图像采集单元与视觉处理单元3部分。激光发射器安装在水下探测设备的底面,采用了3个蓝绿激光发射器作为顶点围成的等边三角形发射方式;图像采集单元用单目或双目摄像头来采集激光发射器投射在海底平面形成的光斑图像,并将其传递给视觉处理单元;视觉处理单元主要负责激光投射图像特征点的提取与识别,对摄像机进行标定得到焦距光心等内部参数后,利用摄像机的针孔模型建立摄像机、海底平面、像面之间的空间几何模型,进而通过理论推导估算出摄像机与海底平面之间的距离。视觉处理单元是整个系统最为关键的部分,包括彩色图像处理、灰度图像处理、像素图像处理等,解决了对数字图像特征识别和目标表达的问题,是本文的重点研究内容。
基于激光投射视觉处理的水下测距技术原理如下:将3个不同颜色(红、蓝、绿)的激光点组成等边三角形,垂直投射在海底平面,由摄像机采集海底的光斑图像,并通过图像视觉处理获得计算参数,最终得到摄像机平面S(光斑光心所在的平面)到海底平面的垂直距离H,如图1所示。根据海底平面的倾斜状况对模型建立进行细化,针对海底平面相对于摄像机成像平面的是否平行,将激光投射成像模型分为理想模型和实际模型两种情况进行讨论:1)理想模型。如图1(a)所示,这种情况下成像平面与海底平面平行,此时投射图像也是等边三角形的三个顶点;2)实际模型。如图1(b)所示,这种情况下成像平面与海底平面不平行,此时投射图像不再是等边三角形的3个顶点,会产生“近大远小”的效应。
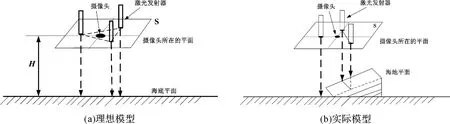
图1 水下成像模型示意图
2 水下三点测距的数学模型
在水下三点成像的理想模型中,测距几何计算方法采用分解法,理想模型透视图如图2所示。以每两个光点组成的线段长度作为已知条件,建立基本测距模型,进行一次测距,从而获得两光点之间的中点位置到摄像机光心的距离,以此类推,直到3个光点均被作为参考点进行了测距计算即可。
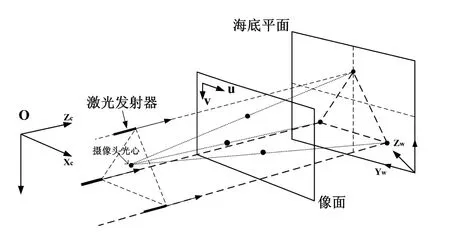
图2 理想模型透视图
为了方便对比,假设有两个与摄像头距离不同的海底平面。如图3所示,假设h1、h2分别是由任意两个激光发射器发射的光束,A、B为对应光束投射在海底平面1 上的真实光点,C、D为对应光束投射在海底平面2 上的真实光点。两光束之间的距离由两个激光发射器之间的距离决定。

图3 理想模型俯视图
经过分析可知,即便是相同间距的光束(AB=CD),但是由于测量距离不同,在图像上,各自对应的二维像点的间距也不同(D2>D1),根据三角形相似的原理可得距离L1和L2:

3 测距系统实验结果
3.1 摄像机标定
目前摄像机的标定工作是困扰很多图像视觉系统的环节之一,虽然国内外很多学者已经对摄像机标定进行了算法研究,其中自标定技术是图像视觉发展的大势所趋,可以获取精准的摄像机内外参数,而不通过繁杂的辅助人力。本文采用的标定方法采用了张正友标定法[10],通过对一定标板在不同方向多次(3次以上)完整拍照,不需要知道定标板的运动方式,假定标定板所在的平面位于世界坐标系的Z=0平面上,通过线性模型分析得到摄像机参数的优化解,然后用最大似然法进行非线性求精,标定出镜头的畸变的目标函数,最终得到摄像头的内外参数。标定装置包括图像采集模型、装置和标定板,如图4所示,标定板为一张8 行12列的棋盘格纸,平整贴在一个平滑的平板上,每个方格为40 mm×40 mm,角点数为96。在PC 机的图像处理平台中的标定代码中打开固定好的摄像头,通过调整焦距,使得采集到的图像中的角点分明清晰,然后固定焦距不变。手持标定板,均匀固定平面旋转标定板,前后翻转,在此过程中拍摄20 张不同标定板姿态的图像,即尽量得到每个角度的图像。最后通过张正友标定函数实现摄像头的内外参数,根据获得的畸变向量,对拍摄的光斑图像进行矫正。

图4 图像采集模型、装置和标定板
3.2 激光投射图像处理
试验在杭州电子科技大学二教3 楼大厅的黑夜环境下进行,通过摄像机获取的原始图像如图5(a)所示。由于深海环境下光照度较低,因此在实验室的测试采用了黑夜环境下激光投射图像。经过彩色图像模型转换,将图像转换为HSV模型后,单通道提取出V通道的图像,如图5(b)所示。经过对亮度超过240的像素点置为255,将240 亮度以下的像素点置为0,将图像的高亮度区域提取,但是这个过程中,必然产生多余杂点,如图5(c)所示。最后进行形态学处理,仅仅除去不必要的杂点,留下了目标点,如图5(d)所示。通过对多数图像的处理结果表明:需要进行完全像素级的噪声点提取工作,才能获得完全“纯净”的目标点。
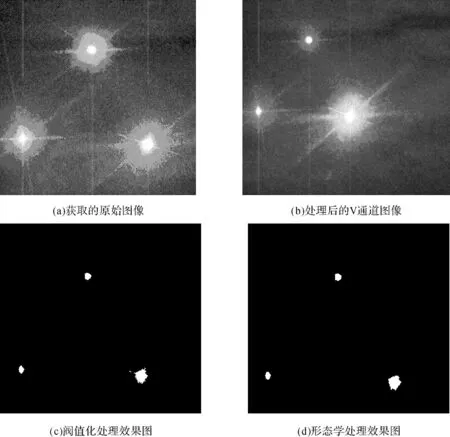
图5 激光投射图像处理过程
3.3 水下测距测试
最后,利用对形态学处理效果图形的丈量计算得到水下测距结果。水下测距的测试结果如表1所示,相对误差较小,适合测距距离较小的场合使用。由于深海探测与取样设备对于水下测距的精度要求并不是很高,因此这套成本低廉的水下测距系统在这种情况下也非常适用。
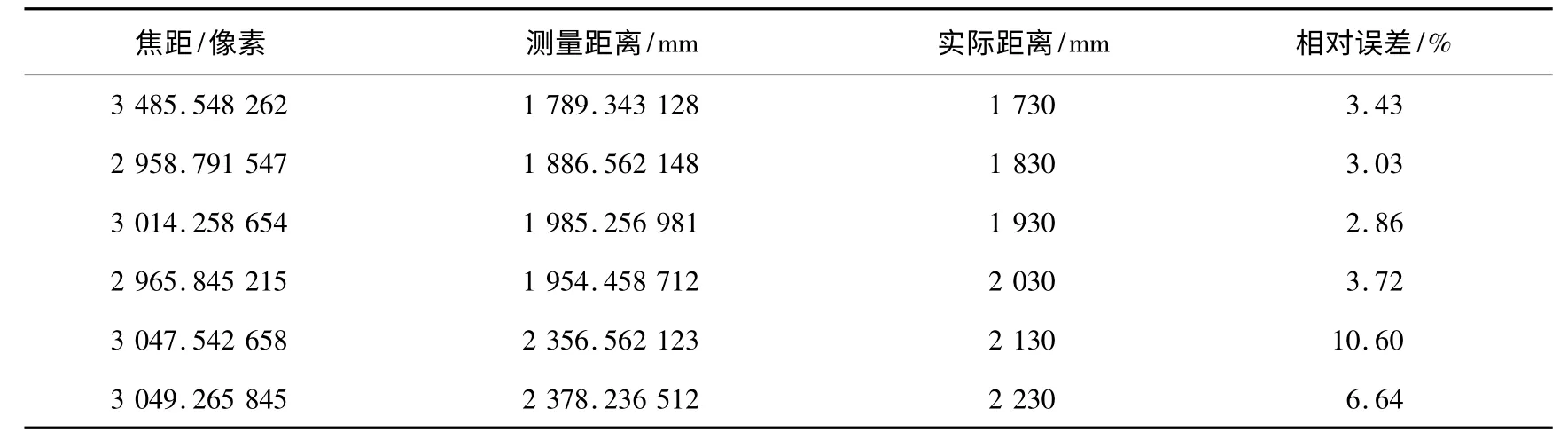
表1 理想模型测距结果
4 结束语
本文深入研究了一种基于三点激光投射图像视觉处理的水下测距技术,通过对投射图像的视觉处理,建立了摄像平面与海底平面之间成像模型的理论推导,得到水下距离计算公式,实验结果验证了本系统的适用性。基于激光投射视觉处理的水下测距系统作为一种新型的价格较为低廉的水下测距辅助系统,可以装备在各种深海探测与取样设备中,具有较大的应用前景,后续将继续研究基于双目视觉处理的水下测距技术与系统。
[1]申家双,潘时祥.沿岸水深测量技术方法的探讨[J].海洋测绘,2002,22(6):60-65.
[2]朱耘.国外水下成像系统的发展[J].舰船电子工程,1999,(3):60-64.
[3]牟健,姜峰,赖新云.深海多波束系统、深拖系统及合成孔径声呐系统的技术性能对比[J].武汉理工大学学报(交通科学与工程版),2012,36(1):82-86.
[4]Yu N,Li L,Su Q,et al.Underwater range-gated laser imaging system design with video enhancement processing[C]//Instrumentation and Measurement,Sensor Network and Automation (IMSNA),2013 2nd International Symposium on.Toronto:IEEE,2013:760-763.
[5]Han H,Zhang X,Ge W.Performance evaluation of underwater range-gated viewing based on image quality metric[C]//Electronic Measurement & Instruments,2009.ICEMI’09.9th International Conference on.Beijing:IEEE,2009:4441-4444.
[6]Fu L,Liu J,Xie F.Research on beyond visual range target allocation and multi-aircraft collaborative decision-making[C]//Control and Decision Conference (CCDC),2013 25th Chinese.Guiyang:IEEE,2013:586-590.
[7]Bianco G,Gallo A,Bruno F,et al.A Comparative Analysis between Active and Passive Techniques for Underwater 3D Reconstruction of Close-Range Objects[J].Sensors 2013,13(8):11007-11031.
[8]金文燕,赵辉,陶卫.激光三角测距传感器建模及参数优化研究[J].传感技术学报,2006,19(4):1090-1093.
[9]王力超,熊超,王晨毅,等.基于竞争机制的简化双目立体视觉测距算法及系统设计[J].传感技术学报,2007,20(1):150-153.
[10]Hu T,Wu H,Liu G.Study of Micro-vision Calibration Technique Based on SIFT Feature Matching[M]//Computer and Computing Technologies in Agriculture V.Berlin:Springer Berlin Heidelberg,2012:270-277.
