单通道无刷直流电机无位置传感器控制方法
2015-12-02尹一帆
尹一帆
(太原学院 机电工程系,山西 太原030032)
无刷直流电机具有几何尺寸小、能量密度大、调速带宽高,启动转矩大,调速性能优越,以及效率高等优点[1-8],广泛用于工业、航空航天、军事装备以及家用电器等众多领域.随着近年来电机技术、器件水平、控制技术以及新材料等的高速发展,无刷直流电机应用得到突飞猛进的增长.
一般来说,传统的无刷直流电机需要借助转子位置传感器获取转子的位置信息,从而根据转子位置信息生成换相逻辑来驱动逆变桥相应的开关管导通和关断.然而,转子位置传感器存在占用额外体积空间,装配调试困难,引出线过多,可靠性低,维护困难等问题,不利于大批量生产,所以无位置控制技术的研究对无刷直流电机的发展十分必要,已经成为近年来研究的热点.无刷直流电机的无位置控制方法主要有:反电势法、反电势积分法、三次谐波法、续流二极管法、磁链估测法、G函数法、状态观测器法以及智能控制策略等等[9-15].然而,在上述无位置控制方法中,或者需要复杂的硬件采集电路,或者需要复杂的软件计算,给实际运用带来困难,所以研究一种简单易实现的无刷直流电机的无位置控制方法具有重要的意义.
1 无刷直流电机的工作原理和数学模型
1.1 无刷直流电机的工作原理
无刷直流电机的基本思想是采用电子开关电路来替换有刷直流电机的电刷,从而有效避免有刷直流电机换相存在火花的问题.图1是无刷直流电机系统原理图,U表示直流母线电压,V1~V6代表6个驱动用功率开关管,D1~D6代表反并联续流二极管,“G”点代表直流母线电压地点,“N”点代表三相绕组星接点,“N′”点代表虚拟的中性点.传统的无刷直流电机定子上安装3个转子位置传感器,当转子旋转时,转子的旋转磁场在3个转子位置传感器上感应出高低电平变化(HA,HB和HC),从而反映转子的位置.控制器根据位置传感器输出的高低电平,通过换相逻辑电路输出6个对应的开关管触发信号,依次驱动6个开关管的导通和关断,从而在定子绕组中产生跳跃的旋转磁场,该定子磁场和转子磁场相互作用,驱动电机旋转.一般来说,无刷直流电机常采用两两导通方式,在每一个时刻,仅有两相绕组导通,每个绕组均导通120°后再关断60°,即在图1中,功率开关管按照V1~V2,V2~V3,V3~V4,V4~V5,V5~V6,V6~V1…的方式循环顺序导通.

图1 无刷直流电机系统原理图 Fig.1 Control system schematic for BLDC motor
1.2 无刷直流电机的数学模型
无刷直流电机三相绕组的相电压平衡方程可以表示为

式中:uA,uB和uC分别是三相绕组相电压;eA,eB和eC分别是三相绕组相反电势;iA,iB和iC分别是三相绕组相(线)电流;R和L分别是三相绕组的电阻和电感(包含自感和互感).
2 单通道无刷直流电机的无位置传感器控制方法
2.1 单通道无位置控制原理
反电势信号与转子位置信息息息相关,反电势法是目前无位置控制中最直接、有效的转子位置检测方法.图2(a)给出了转子位置与三相绕组的空间位置关系,把A,B和C相绕组的中心线处依次定义为A轴,B轴和C轴,转子在旋转过程中,将在三相绕组中产生反电势,把图2(a)按照A相绕组平面展成,得到的反电势与转子位置的对应关系如图2(b)所示.转子在旋转一周的过程中,当转子与某相绕组平面重合时进行换相,即图2(b)中的ωt=0°(360°),60°,120°,180°,240°和300°分别对应6个换相时刻.在转子旋转一周过程中,正确检测转子位置来定位上述6个换相时刻是无刷直流电机正常工作的前提.采用无位置控制方法进行转子位置检测时,通常是借助于检测相反电势的过零点,然后延时30°得到换相点,这是无刷直流电机无位置传感器控制的基本思想.
本文将电压uN′M作为换相信号获取载体,通过分析该电压与换相点的关系来获取电机的换相点.首先,将uAN′+uBN′+uCN′=0变形可以得到

所以,uN′G和uN′M可以表示为

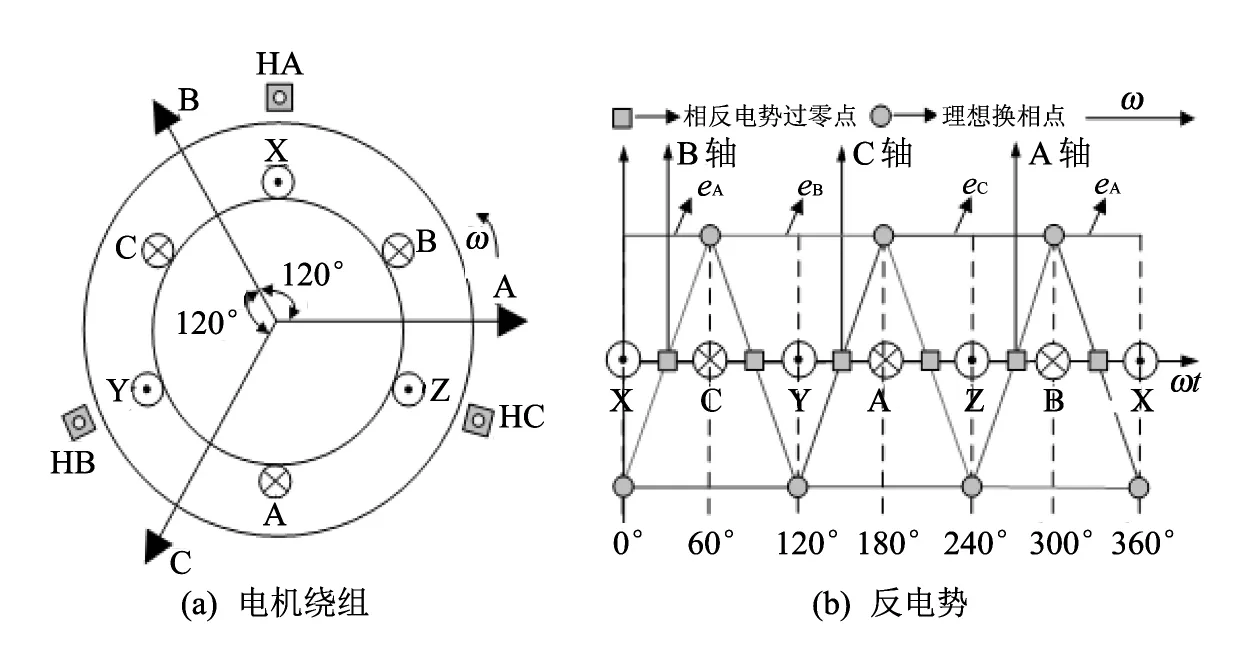
图2 电机绕组、反电势和转子位置关系 Fig.2 Relationship between the motor winding,back EMF and rotor position
根据式(3),以电机由V3-V2导通变成V3-V4导通的换相过程为例进行电压uN′M分析.在换相过程开始时,由于电机绕组存在一定的电感量,根据楞次定律,由于电感中存在一定的能量,换相发生时将会出现一个续流的过程,即关断相(C相)的电流不能够立即关断,而是会通过V2同桥臂反并联的二极管D5进行续流,因此,V3,V4和D5这3个开关管将会同时开通,那么此时电机的3个端电压u ,u,u的表达式为

将式(4)代入式(3),求得uN′M为

当电感中存在的能量经过续流消耗之后,D5将会关断,只有V3-V4导通,此时对应的3个端电压uAG,uBG,uCG的表达式为

将式(6)代入式(3),求得此时的uN′M为

同样可推导出V3-V2,V1-V2,V4-V5,V5-V6和V6-V1分别导通时的uN′M波形,如图3中实线所示,uN′M的频率是基波频率的3倍,并且换相续流(ωt分别等于0°(360°),60°,120°,180°,240°和300°)导致的换相凹凸也是基波频率的3倍.如果不考虑换相凹凸的影响,uN′M的过零点与相反电势过零点一一对应,因此可以通过检测uN′M的过零点来计算得到换相点,并且不需要电机提供中线.但是由于换相凹凸的影响,导致uN′M在凹凸部分出现过零点,从而混淆有用的过零点,并且上述推导都是建立在桥臂不调制的情况下,如采用PWM方式调制桥臂,将在PWM频率的每一个周期出现换相凹凸,从而会有更多的过零点混淆有用过零点,而且电机运行中的电磁干扰也将加重这种混淆.

图3 u N′M的波形图 Fig.3 Waveform of ideal u N′M
2.2 换相信号获取
为了从复杂的uN′M信号中提取有用的过零点信息来计算换相信号,本文将uN′M信号采用如图4所示的电路进行处理,得到干净的准换相信号Hx,其中的一阶低通滤波器[16]和二阶低通滤波器实现杂波的滤除,电压比较器将滤波后的电压信号进行过零点提取.之所以称为准换相信号,是由于采用上述处理之后,导致得到的Hx信号与实际的换相点之间存在偏差,此偏差的计算表达式为

式中:d1和d2分别代表一阶低通滤波器和二阶低通滤波器带来的延时,其表达式分别为

式中:ω代表电机的电角速度,通过测量准换相信号相邻上升沿和下降沿之间的时间间隔得到.
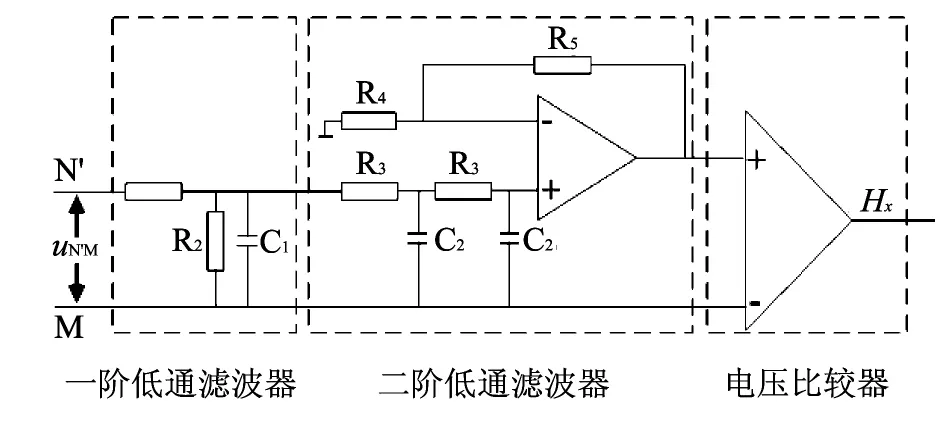
图4 换相信号提取电路 Fig.4 Extraction circuit for the commutation signal
需要指出,虽然低通滤波器会导致换相信号出现偏差,但其却是必不可少的环节.滤波器必须合理设计,否则将会使杂波滤除不干净,导致换相信号中存在杂波,影响电机的换相,如图5所示,不合理的设计将会导致很多误换相信号的存在,而合理的设计将会得到干净的准换相信号.

图5 不同滤波器下的准换相信号 Fig.5 Quasi-commutation signal under different filters
本文采用DSP芯片TMS320F2812作为主控制芯片,计算真正换相信号的步骤如下:将准换相信号接入DSP的CAP捕获端口进行捕获,每当准换相信号出现上升沿或者下降沿,都会触发DSP的捕获中断,在中断中首先进行转速的计算,然后根据式(8)和式(9)得到延时角度δ,最后利用式(10)计算得到延时角度δ,将准霍尔信号延时δ角度得到真正的换相信号.

其中,Φ=30+60k(k=0,1,2).
获取真正的换相信号后,根据表1所示的换相表得到需导通的开关管,实现电机的准确换相.

表1 换相表 Tab.1 Commutation table
3 实验验证及分析
单通道无刷直流控制系统实现原理如图6(a)所示,对应的整个无刷直流电机调速系统实现框图如图6(b)所示,采用两台电机对拖的方式进行测试,一台作为主动电动机使用,另一台作为被动发电机使用,发电机是电动机的负载,通过调节发电机的负载电阻改变电动机的负载.

图6 单通道无刷直流电机无位置控制系统 Fig.6 Sensorless control system for BLDC motor with only one channel
图7是电机在不同转速条件下,利用上述方法得到的A相实际换相信号和理想换相信号的对比,其中的理想换相信号是依靠准确安装的霍尔传感器得到的,可以看出,在多个转速条件下,实际换相信号能够很好地吻合理想换相信号,所以,可以利用本文的方法来替代传统的霍尔传感器实现无刷直流电机的换相.
图8是电机在1 000 r/min和2 000 r/min时的线电压uAB,电流iA和电压uN′M的实验波形,其中图8(a)是电机在1 000 r/min轻载(负载转矩为0.5 N·m)的实验波形,而图8(b)是电机在1 000 r/min重载(负载转矩为2.5 N·m)的实验波形,可以看出,采用本文的方法,不论轻载还是重载,都可以保证电机的可靠运行.图8(c)和图8(d)分别是电机在2 000 r/min轻载(负载转矩为1 N·m)和重载(负载转矩为3.5 N·m)的实验波形,电机依然可以可靠运行,并且相比于1 000 r/min,高速电压和电流幅值都有所增加.另外从图8中还可以看出,由于PWM调制的存在,导致uAB,iA和uN′M的波形都有所畸变,但是采用本文的提取电路,依然能够保证电机信号的准确提取和可靠运行.

图7 不同转速下的实际换相信号和理想换相信号对比 Fig.7 Actual commutation signal and the ideal commutation signal at different speeds

图8 不同转速下的实验波形 Fig.8 Experimental waveform of different rotational speed
4 结 论
1)uN′M能够有效反映转子位置信息,不考虑PWM波的情况下,uN′M的过零点和反电势的过零点是一致的,通过设计提取电路可得到准确的换相点,从而替代传统的霍尔传感器实现电机换相.
2)利用uN′M获取无刷直流电机无位置换相信号,只需采用一路电压信号,且不需要电机提供中线,简单易实现.
[1]谭建成.永磁无刷直流电机技术[M].北京:机械工业出版社,2011.
[2]Kumar B M,Ravi G,Chakrabarti R.Hybrid speed control of sensorless brushless DC motor with fuzzybased estimation[J].IUP Journal of Electrical ffElectronics Engineering,2011,4(2):21.
[3]Xia C L,Li X M.Z-source inverter-based approach to the zero-crossing point detection of back EMF for sensorless brushless DC motor[J].IEEE Transactions on Power Electronics,2015,30(3):1488-1498.
[4]Chun T W,Tran Q V,Lee H H.Sensorless control of BLDC motor drive for an automotive fuel pump using a hysteresis comparator[J].IEEE Transactions on Power Electronics,2014,29(3):1382-1386.
[5]Fang J,Li W,Li H.Self-compensation of the commutation angle based on DC-link current for highspeed brushless DC motors with low inductance[J].IEEE Transactions on Power Electronics,2014,29(1):428-438.
[6]Fang J,Zhou X,Liu G.Instantaneous torque control of small inductance brushless DC motor[J].IEEE Transactions on Power Electronics,2012,27(12):4952-4964.
[7]Fang J,Zhou X,Liu G.Precise accelerated torque control for small inductance brushless DC motor[J].IEEE Transactions on Power Electronics,2013,28(3):1400-1412.
[8]Park J W,Hwang S H,Kim J M.Sensorless control of brushless DC motors with torque constant estimation for home appliances[J].IEEE Transactions on Industry Applications,2012,48(2):677-683.
[9]宋飞,周波,吴小婧.校正无位置传感器无刷直流电机位置信号相位的闭环控制策略[J].中国电机工程学报,2009,29(12):52-56.Song Fei,Zhou Bo,Wu Xiaojing.Closed loop control method to correct position phase for sensorless brushless DC motor[J].Proceedings of the CSEE,2009,29(12):52-56.(in Chinese)
[10]Jiang Q,Bi C.A new phase-delay-free method to detect back EMF zero-crossing points for sensorless control of spindle motors[J].IEEE Transactions on Magnetics,2005,41(7):2287-2294.
[11]吴小婧,周波,宋飞.基于端电压对称的无位置传感器无刷直流电机位置信号相位校正[J].电工技术学报,2009,29(4):55-57.Wu Xiaojing,Zhou Bo,Song Fei.A new control method to correct position phase for sensorless brushless DC motor[J].Transactions of China Electrotechnical Society,2009,29(4):55-57.(in Chinese)
[12]Iizuka K,Uzuhashi H,Kano M.Microcomputer control for sensorless brushless motor[J].IEEE Transactions on Industrial Applications,1985,27(3):595-601.
[13]张相军,雷淮刚.直流无刷电机无位置传感器控制中反电动势过零检测算法及其相位修正[J].电气传动,2001,31(2):14-16.Zhang Xiangjun,Lei Huaigang.Zero-crossing algorithm and phase correction of BEMF in the sensorless control of trapezoidal BLDC motors[J].Electric Drive,2001,31(2):14-16.(in Chinese)
[14]邹继斌,江善林,张洪亮.一种新型的无位置传感器无刷直流电机转子位置检测方法[J].电工技术学报,2009,29(4):48-53.Zou Jibin,Jiang Shanlin,Zhang Hongliang.A novel method of detecting for rotor position of a sensorless brushless DC motor[J].Transactions of China Electrotechnical Society,2009,29(4):48-53.(in Chinese)
[15]李志强,夏长亮,陈炜.基于线反电动势的无刷直流电机无位置传感器控制[J].电工技术学报,2010,25(7):39-25.Li Zhiqiang,Xia Changliang,Chen Wei.A position sensorless control strategy for BLDCM based on line back-EMF[J].Transactions of China Electrotechnical Society,2010,25(7):39-25.(in Chinese)
[16]崔臣君,刘刚,郑世强.基于线反电动势的高速磁悬浮无刷直流电机无位置换相策略[J].电工技术学报,2014,29(9):119-128.Cui Chenjun,Liu Gang,Zheng Shiqiang.Commutation strategy of high-speed maglev brushless DC motor based on line back EMF without position[J].Transactions of China Electrotechnical Society,2014,29(9):119-128.(in Chinese)
