基于RV 的装甲分队模拟训练系统地形建模研究
2015-11-28郭傲兵吴伟胜
郭傲兵,冯 瑀,吴伟胜
(装甲兵工程学院,北京 100072)
随着计算机科学和新军事革命的飞速发展,模拟训练已渗入到作战领域的各个方面,并且在这些领域中起着重要的作用[1]。而影响模拟训练效果的重要指标之一是虚拟环境,建立丰富逼真的地理环境是虚拟环境的基础,人同该环境相互交互和相互影响。在模拟训练中,地形的逼真度直接影响虚拟世界的逼真度,影响模拟训练的真实感和受训人员的沉浸感,从而影响训练效果。本文对基于RV 的装甲分队模拟训练系统进行简单介绍,重点研究使用RV 引擎的套装工具Visitor3 进行地形建模的理论与方法。
1 基于RV 的装甲分队模拟训练系统
1.1 RV 可视化引擎
Reality Visual 真实模拟引擎,简称RV 引擎,是由捷克波希米亚交互工作室(Bohemia Interactive Studio,BIS)于2006年开始开发的军用战场图形渲染引擎。由于该引擎具有梦幻般的战场态势生成与表现能力,已经广泛用于西方包括美国,英国等主要发达国家的军用计算机仿真系统。同时,世界各国的很多军用游戏生产厂商也应用该软件开发军事类模拟游戏。VBS2(Virtual Battle Space 2)简称虚拟战场空间Ⅱ是RV 引擎的第三代产品,VBS2 逼真的战场表现能力代表了目前计算机图形学技术在军事领域最前沿的技术。RV图形引擎广泛采用了目前计算机图形处理的最先进的硬件和软件技术,包括最新的NV 图形卡的硬件加速技术、Open-GL3.0 复杂光线追踪算法[2]、多重复合纹理渲染加速、专业物理引擎技术以及基于分形原理的自然环境建模技术等。图1 显示了RV 渲染的1 幅战场图片,其逼真效果已经超乎人类视觉的分辨粒度。

图1 RV 引擎渲染的场景效果图
1.2 装甲分队模拟训练系统
装甲分队模拟训练系统采用分布式交互仿真技术,以RV 可视化引擎为视景渲染引擎,能够实现单乘员射击、驾驶、通信等分业训练,乘员间协同训练和人在环的装甲分队对抗仿真训练。该模拟训练系统由装备仿真节点、态势观测节点和管理员节点组成,其系统结构如图2 所示。
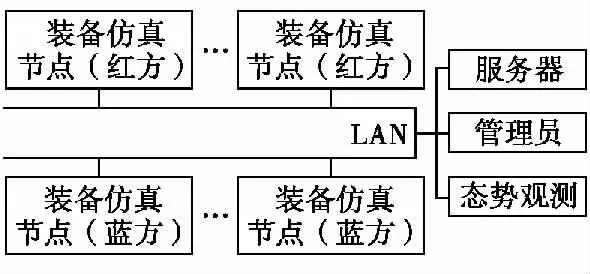
图2 装甲分队模拟训练系统结构图
其中,每个装备仿真节点又由车长节点、炮长节点、驾驶员节点组成,车长、炮长、驾驶员节点各用一台计算机进行视景仿真,它们之间通过局域网互联构成装甲分队模拟训练系统。在这个系统中,高逼真度的地形模型是保证系统沉浸感强、训练效果好的前提和基础。
2 地形建模工具介绍
装甲分队模拟训练系统使用的地形建模工具是RV 引擎的套装工具Visitor3,Visitor3 是BIS 开发的套装地形建模软件,在建模过程中采用真实地形的高程数据,采用飞机拍摄的高精度航空照片作为地形纹理,可以制作出高逼真度的三维地形。
Visitor3 在同一个完整的环境中提供了几乎所有必需的工具,用来创建最优化、高度逼真的实时三维地形模型。它的工具包具有精简、直观等特点,工作在所见即所得的环境中。与其它地形建模软件相比,Visitor3 有以下优点:
1)对象操作更容易,支持二维和三维同时操作;
2)操作简便,地形建模时间短,建模误差小,控制精确;
3)支撑批处理操作,支持处理大规模的实体导入;
4)支持脚本控制和网络创作。
将制作好的地形数据保存为PBO 数据格式,它是RV 引擎专用的数据格式。地形数据中包括数据文件夹、资源文件夹、config.cpp 配置文件、* .hpp 文件、* .wrp 文件。其中,数据文件夹包括由地形开发软件Visitor 3 生成的植被纹理图、卫星纹理图的详细分块表面纹理数据;资源文件夹包括资源数据、帮助文件和工程文档;* .hpp 文件定义了地图的名字和二维地形特征;* .wrp 文件为地图本身,它是和* .hpp 文件编译时一起产生的。
3 地形建模的实现
3.1 地形数据的获取与预处理
随着科学技术的发展,图形图像学中支持大地形生成、海量纹理调度的相关技术迅速发展并趋于成熟,计算机处理能力的大幅度提高。使得构建“真实环境”的视景有了技术保障,基础地理信息数据的数字化,也为此提供了数据支持。
在三维地形构建中,地形数据的选取及预处理是视景仿真建模的基础,数据类型的选取及预处理的效果直接影响虚拟战场环境的逼真度。通常以数字高程模型[3](Digital Elevation Model,DEM)作为几何数据,配以地表文化特征数据,建立真实的地形模型。根据仿真应用的需要,选取适当精度的数字高程数据和地表文化特征数据是十分必要的,仿真应用的目的直接决定三维地形所需数据的精细程度。在本系统中,由于需要建立高逼真的三维地形,我们使用真实地形的DEM 数据和飞机的航片作为三维地形的数据源。
具体方法如下:
1)使用真实地形的DEM 高程数据数,用Global Mapper进行转换,采用Arc/Info ASCII Grid 格式,在Disable Hill Shading 和Gradient Shader 下确定最低点和最高点,保存为16 位灰度图* .png。为了保证地形的连续性和相似性,采用Wilbur 进行高斯模糊,得到的灰度图的灰度值表示了地形的高低不同,图3 所示为某地形的灰度图。在配置文件config.cpp 中,设置灰度图所代表的该地形范围内的高程最大值和最小值。配置文件中主要包括的内容有:
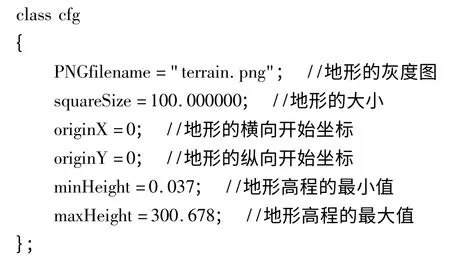

图3 某地形的灰度图
3.2 纹理数据的获取与预处理
纹理是指物体表面的细节,是一种物体区别于其它物体的质地特征。自然景象具有丰富的纹理细节,真实的纹理是环境仿真中建立地理环境的重要手段。近年来由于卫星遥感技术的发展,分辨力已经接近或达到航空影像的效果,因此,卫星图已成为视景建模中地表纹理的首选,当然如果能够有航空影像,建模的精细度会进一步提高。地形构建中纹理映射的基本思路是把纹理影像按经纬度映射到DEM 生成的三维网格模型上,因此纹理映射的关键是实现影像与DEM 的精配准,而影像的辐射特效直接影响立体模型的视觉效果。为了提高纹理映射的准确和视觉效果,在纹理映射时必须对航拍图作预处理,包括几何校正、图像镶嵌和图像融合。本系统中,为了提高三维地形的建模精度,采用航拍图作为地形的纹理数据。
3.3 纹理映射
本装甲分队模拟训练系统的地形建模中,为了提高对动态地形实时性的需求,采用了多分辨率纹理映射技术[4]。在视距比较近时要求地形的分辨率比较高,视距比较远时可以忽略一些细节的东西,减小数据量,提高显示速度。当视点变化时,所选取的地形纹理数据各不相同。具体而言就是,如果视点离物体较远,则使用航拍图作为地形的纹理数据,随着视点向地面移动,实时系统会逐渐用材质纹理来代替,反之亦然。
使用航拍图作为地形的纹理数据和采用基于色带的材质纹理映射方法共存的方法制作材质纹理图,以便系统在不同距离上显示使用。采用基于色带的材质纹理映射的具体制作方法是:
1)根据色带定义各种颜色所代表的纹理含义,例如用红色表示干草地,黄色表示道路,绿色表示青草地,蓝色表示水面,如图4 所示。根据相应颜色定义layers.cfg 文件,部分内容如下:
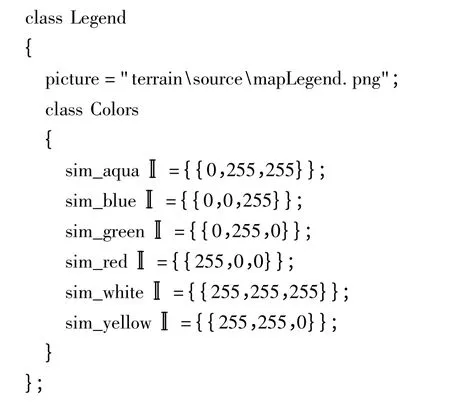
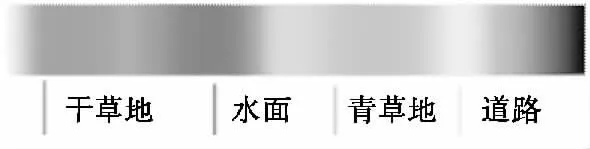
图4 色带定义
2)制作特征图。用Photoshop 软件打开所要构建地形区域的航拍图,对航拍图进行处理,用定义好的颜色替换标准对草地、道路、河流等物体进行颜色替换。
3)制作材质纹理。经过步骤2 处理的特征图中的每一个像素代表了若干个地形网格,每一个网格都要用其颜色代表的材质纹理进行贴图。
4)编写配置文件,编写配置文件的目的是为了把每个像素与它的颜色代表的纹理匹配起来,也就是把材质纹理准确的贴到每个像素上去,实现材质纹理映射。配置文件如下:
3.4 三维地形建模的实现
建立一个新的工程,首先需要设置工程参数。地形大小参数设置为512 ×512,地形单元格设置为10,则地形大小自动的设置为5 120 ×5 120 m2。设置航片的大小参数,大小要适合后面输入的植被纹理图等,一般设为5 120。
1)DEM 数据的输入
在Vistor3 中,选择Import Terrain from picture,浏览P:...source errain errain.pbl 文件,这样就输入了地形纹理图。
2)卫星纹理图和植被纹理图的输入
在Vistor3 中,选择Import satellite & mask,成功输入卫星纹理图和植被纹理图后在数据文件夹中会出现layers 文件夹。卫星纹理图、植被纹理图和RVMAT 文件的分块数据会存放于layers 文件夹。
3)插入和编辑物体
地形建模软件Vistor3 有独特的操作界面,在二维场景中编辑的物体能够在三维场景中直接显示出来,这种二维,三维同时操作的方式配合卫星云图保证了地形和真实地形的匹配程度,最大限度的还原真实地形,仿真粒度高。
选择Panel of objects,在工具选项里,可以选择自然物体、人造物体、马路等,通过鼠标点击放置,修改模型参数,达到快速插入和编辑物体的目的。
4)配置文件编写
为了简化地形建立的难度,节省操作时间,并非所有的地表植被都需要手工设置位置,除了典型标志性的植被外,大部分草、树、岩石等在配置文件Config.cpp 中进行设置。它主要完成非直接添加植被的设置,如:环境声音的设置,天空模型的引入等。
5)地形的应用
在完成地形和物体编辑后,选择Vistor3 中的Connect to Buldozer,将制作好的地形模型二进制化,把* .png 格式和* .tga 格式的文件转换为* .paa 格式的文件。通过程序调入场景,实现对真实地形的模拟。
经过编辑后已经插入树木、道路、房屋等物体的地形如图5 所示:
图5 插入物体后的三维地形
4 结束语
模拟训练已经成为各个国家军事训练的重要途径。本文介绍了捷克波希米亚交互工作室开发的RV 视景仿真引擎,并介绍了基于此引擎构建的装甲分队模拟训练系统;重点对系统采用的地形建模工具和建模方法进行研究,最后给出了使用RV 引擎的套装软件Vistor3 进行地形建模的过程。实践证明,所建立的三维地形模型逼真程度高,在某模拟训练系统中使用效果较好。
[1]朱竞夫.装甲兵作战模拟训练系统装备综述[J].现代军事,2005(12) :15-19.
[2]童星,袁道华.基于GPU 和均匀栅格法的光线追踪算法研究[J].计算机工程与设计,2011(21) :3499-3503.
[3]吕建峰,刘定生,焦伟利,等.DEM 生成算法并行化研究[J].中国图象图形学报,2002(7) :506-512.
[4]卜松涛,岳凡琦,依兰.基于倾斜影像的三维建筑物纹理提取方法研究[J].测绘与空间地理信息,2014(37) :206-208.
