对地观测高分辨率TDICCD相机调焦控制系统设计
2015-11-26吕世良刘金国王晓茜
吕世良 ,刘金国,王晓茜
(1.中国科学院长春光学精密机械与物理研究所,吉林长春130033;2.地理信息工程国家重点实验室,陕西西安710054;3.中国科学院东北地理与农业生态研究所,吉林长春130102;4.中国科学院大学,北京100049)
1 引言
随着航天遥感技术应用的发展,基于卫星平台的对地观测相机成像已经达到实时高效的能力,而且观测范围广,空间上能实现对全球覆盖的能力,而且传输速率高[1-4]。因此基于卫星平台的航天相机得到越来越多的重视和利用。对地观测高分专项卫星有效载荷之高分辨率相机具有分辨率高、覆盖范围宽、时效性好、寿命长等特点,在644.6 km轨道高度可实现地面全色像元分辨率2 m,多光谱分辨率8 m,覆盖宽度100 km的对地观测性能要求。
具有高分辨率和宽视场性能的航天相机,一般需要具有长焦距、反射式光学系统,与传统的透射式相机系统相比,反射式相机具有谱段宽、质量轻、反射系统不产生色差等优点[5-7]。随着半导体工艺的改进和半导体生产技术的进步,TDICCD像元尺寸可以越来越小,并且TDICCD技术具有在不牺牲空间分辨率和工作速度的情况下能获得高质量的图像,其探测灵敏度和响应均匀性也逐步提高。因此,在航天遥感相机领域,TDICCD探测器成为解决航天相机宽覆盖、宽视场、高分辨率的主要技术途径和关键技术。采用TDICCD作为成像探测器的传输型相机是航天相机研制的发展趋势[8-12],具有广泛的应用前景。
航天相机由于其工作环境的特殊性,所处运载和运行环境因素经常变化,特别是受冲击、振动、压力、温度、轨道高度等因素变化。相机轨道环境真空度约为10-5~10-6Pa量级,背景温度约为3K,影响相机温度的轨道环境空间外热流受太阳辐射、地球红外辐射、地球太阳反照等影响,因此相机温度变化剧烈。而相机的光机材料都会因这些因素变化而变形,特别是相机光学镜头材料变形对相机的焦平面影响可能导致相机离焦[13-16]。为保证相机在上述环境条件下的成像质量,需要对相机焦平面进行控制调节,以达到对焦平面的离焦量进行精确补偿。
本文针对课题组在研的基于卫星平台对地观测高分辨率TDICCD相机,对研制要求和对地观测技术指标要求进行了分析;介绍了高分辨率TDICCD相机的总体调焦控制系统技术指标和调焦控制系统方案;重点阐述了高分辨TDICCD相机调焦控制的设计与实现,并对调焦控制系统和调焦机构进行试调焦精度测试。
2 离轴反射式光学系统设计
2.1 离轴四反光学系统组成
对地观测高分辨率TDICCD相机的光学系统设计如图1所示。光学系统设计为像方准远心光路,这种光学系统的设计优点使得像面离焦时,在正负焦深范围内产生的投影畸变可以忽略不计。
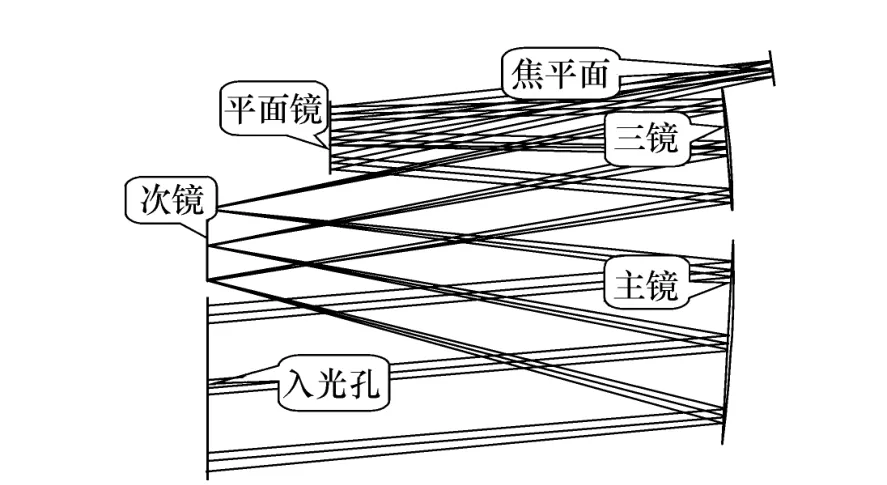
图1 高分辨率TDICCD相机光学系统设计原理图Fig.1 Priciple diagram of optical system of high resolution TDICCD camera
根据成像视场和成像覆盖宽度,采用离轴四反、无中心遮拦、无中间像的光学系统,将次镜确定为光阑位置,主镜和次镜的间隔与次镜和三镜的间隔相同,可以避免主镜和像面之间有直接入射的杂光干扰。光学系统包括主镜、次镜和三镜三块非球面镜以及一块折返光路的平面反射镜,这样可以使相机光学系统的结构设计得更为紧凑合理,光学和机械装配结构稳定。
2.2 长焦平面拼接设计
对于需要宽成像视场和宽地面覆盖推扫成像的航天相机,单片TDICCD探测器的像元数不能满足宽视场和地面宽覆盖的要求。为解决这一矛盾,采用多片TDICCD交错拼接的方案,等效为一个长TDICCD焦平面。但是每两片TDICCD探测器的边缘不能完全重合,因此,拼接时采用上下两行交错拼接。计算出多片TDICCD重合像元素,使之在推扫成像时成像效果等效为一行长TDICCD的推扫成像效果。这样就将多片TDICCD拼接成一个大视场探测器阵列。
为使地面覆盖宽带达到100 km的技术要求,像面组件采用视场拼接方案,8片TDICCD拼接成长线阵,每片TDICCD像元数为6 144,拼接后像元总数为49 152。
图2是高分辨TDICCD相机焦平面机械式交错拼接原理图。在相机焦平面像面的视场中心线两侧分两行上下交错排列相邻的TDICCD器件,此种拼接方法光能利用率高。拼接的长TDICCD焦平面通过刚性连接固定在相机调焦动机构上。
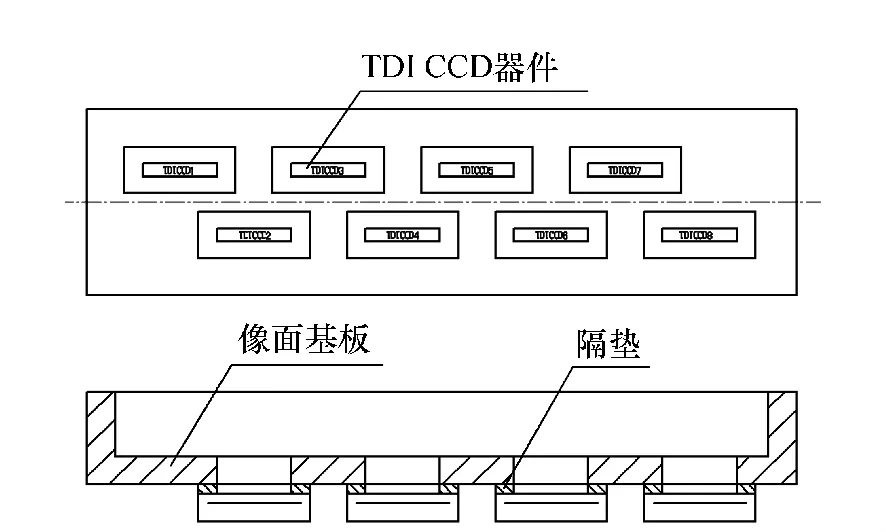
图2 TDICCD焦面组件机械交错平面拼接原理图Fig.2 Principle diagram of mechanical interleaving assembly TDICCD focus plane
3 调焦控制系统组成
3.1 高精度调焦机构设计
根据用户提出的调焦控制系统的调焦精度,需要计算出分配给调焦机构的调焦精度。根据计算公式2Fλ2,求得焦深为 ±80 μm,采用移动焦平面方式调焦,调焦精度优于±20 μm时能够满足调焦控制系统的调焦精度要求。工程设计误差、机械加工误差和装配装调误差、温度等环境因素引起的相机光学系统各个反射镜曲率变化,以及光学零件轴向间隔改变引起的焦距变化量,相机焦平面在光轴方向的调焦行程为±2 mm可满足调焦范围要求。经计算得到,调焦镜组件重20 kg,驱动的滑动件重2.2 kg,驱动载荷按照30 kg计算。
综合以上分析,设计的高精度调焦机构如图3所示,利用执行动力元件步进电机驱动调焦机构运动。调焦机构内部机械运动组成:一级传动齿轮副和一级蜗轮蜗杆传动副,从而带动端部装有绝对式光电轴角编码器的滚珠丝杠副,推动导轨上的滑动部件带动焦面组件沿其光轴方向前后运动。滚珠丝杠副的螺母与丝杠之间为无间隙配合,通过测量绝对式光电轴角编码器的旋转角度,即可计算出焦面运动的实际位移,即调焦量。调焦机构设计参数如下:
(1)调焦范围:0~4 mm;
(2)调焦减速器速比:40∶1;
(3)丝杠导程:4 mm;
(4)编码器144°对应调焦行程0~4 mm;
(5)步进电机步距角为0.9°;
(6)步进电机一步对应调焦量为0.053 μm;
(7)焦平面位移1 μm对应编码器一码1.64个码值。
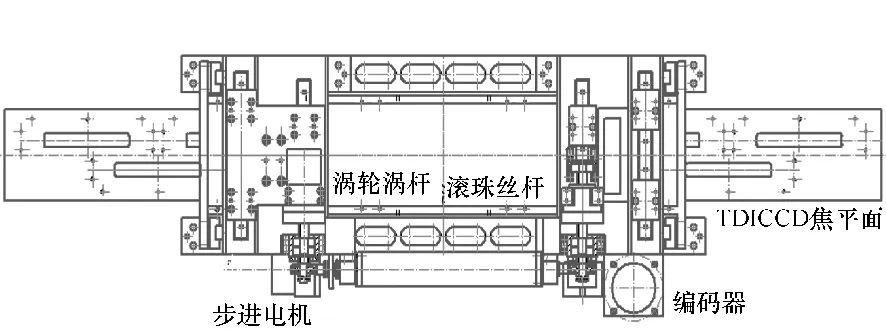
图3 调焦机构结构图Fig.3 Schematic diagram of focusing mechanic
3.2 调焦控制系统组成及工作过程
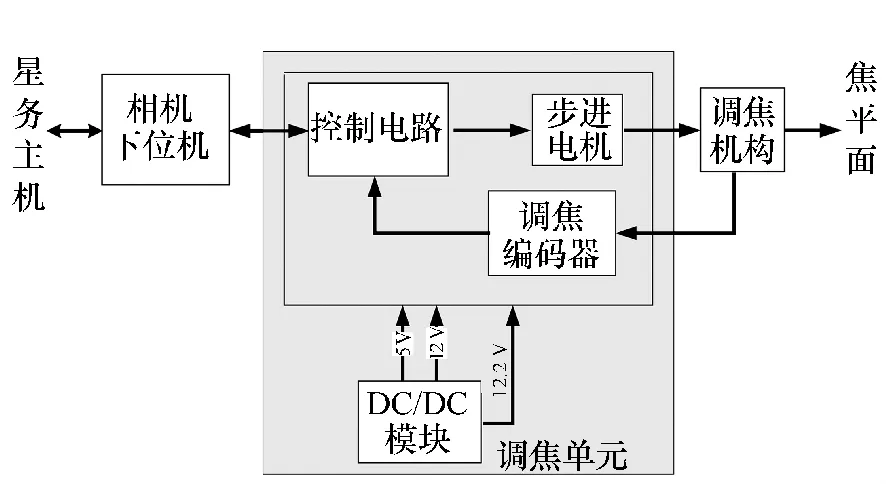
图4 调焦控制系统结构图Fig.4 Schematic diagram of refocusing control system
调焦控制系统是根据相机在轨成像对调焦性能和功能的需求设计的多功能控制系统。根据性能和功能需求调焦控制系统组成如图4所示。相机的调焦控制系统电气部分主要采用Silicon Labs公司的C8051F020芯片为主控芯片,设计了调焦编码器数据采集与处理电路、调焦步进电机驱动控制电路、通讯接口电路、供电系统电源电路、单片机外围电路、电源变换DC/DC模块;光机结构部分包括把旋转运动转换为线运动的调焦机构、TDICCD焦平面、位置检测光电编码器等模块。
3.3 调焦控制系统工作过程
调焦控制系统工作过程如下:通过RS485总线接收来自位机的调焦控制指令,总线发送调焦命令和调焦参数给调焦控制系统控制器C8051F020,并根据接收的指令对光电编码器位置信息进行采集、对调焦步进电机进行开环、闭环调焦控制,并对轮询调焦状态和停止调焦指令进行应答,该模式下通讯能够发送和接收数据。当轮询编码器位置信息时,编码器位置信息通过RS485总线发送给上位机,上位机再把位置信息通过CAN总线送给星务计算机,然后通过无线传输形式发送到地面接收站。
这种调焦控制系统方案可以实现以编码器位置量为输入的闭环控制,也可以实现以步进电机步数为输入量的开环控制。
4 调焦控制系统测量与结果分析
4.1 调焦控制系统测量设备组成
在实验室内通过设计的调焦控制系统对焦平面机构全系统进行了测试,现场测试如图5所示。由于TDICCD焦平面为8片TDICCD拼接的长焦平面,因此用两个千分尺分别固定在焦平面的两端不动机构件上,表的指针对准TDICCD焦平面并把数显千分尺清零,即数显千分尺的0 μm对应调焦行程的一个端点。由于调焦机构没有机械限位保护,如果调焦机构运动范围超过行程的两个极限点,会损坏调焦机构,因此本次调焦机构运动范围限制在0~4 mm。
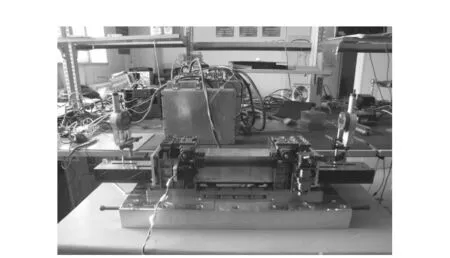
图5 调焦控制系统测试图Fig.5 Test schematic of refocusing system
测试设备中包括相机下位机、调焦控制系统电子学部分、调焦电机和调焦机构及TDICCD焦平面组件。
4.2 开环调焦控制精度测试结果
开环控制是以调焦步进电机走的步数为输入量来控制焦平面运动,本试验中调焦电机以376步/次带动焦平面组件运动,每次运动后记录TDICCD焦平面直线位置值,根据测试记录数据绘制其调焦行程测试范围内TDICCD焦平面位置与主份编码器的码值对应关系曲线,如图6所示。
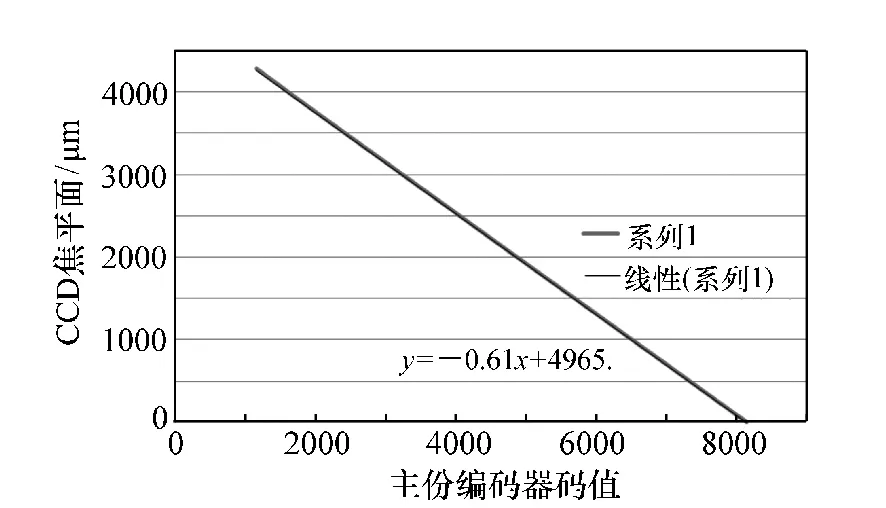
图6 调焦行程内CCD焦平面位置与码值对应曲线Fig.6 Position curve of CCD focus plane vs.encoder value
调焦电机以376步/次带动调焦组件运动,记录每次运动后CCD焦平面的位置值,并计算出CCD焦平面每次运动位置值与上一次的位置值的差值xi,求出所有差值的平均值

计算出每次调焦运动量与差值平均值的残差Δxi:

在调焦测试行程内绘制每次CCD焦平面运动量残差Δxi大小。对调焦行程内38次测量记录数据,剔除初始点和较大误差测试数据,对其中35次测量记录数据根据式(2)分别计算各自残差大小,计算结果如图7所示。
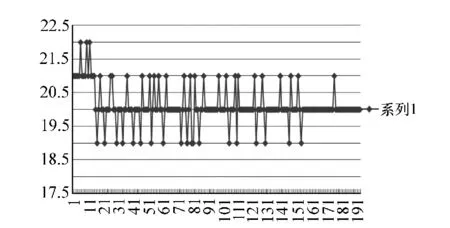
图7 开环调焦测试数据的残差曲线Fig.7 Error curve of CCD focus plane test by open loop
从残差计算结果看出,残差都小于2.2 μm,即,

从记录的测试数据计算出平均值为:

根据贝塞尔公式计算其标准偏差的估计量为:

其标准差为:

取置信度为99.7%,置信系数为3时,从测量数据中可以得出此时测量准确位置为:

因此调焦系统的调焦精度为±7.2 μm(不考虑系统误差情况)。
4.3 调焦精度测试与理论设计对比
根据对调焦机构主份测试数据:当电机走376步对应 TDICCDCCD 焦平面20.3 μm,对应编码器变化30.3个码值。即调焦步进电机每走一步相当于焦平面运动的距离为:

调焦机构设计参数换算关系为:
电机运动16.936°对应TDICCD焦平面位移1 μm,同时对应编码器轴角度 0.036°,则 0.036°对应的码值为:0.036°/(360/16384)=1.6384 个码。
电机每步焦面移动距离:

以上测试分析与3.1节的理论设计值一致,由此得出调焦系统实际调焦控制精度测试结果符合理论设计值。
5 结论
针对基于卫星平台的对地观测高分辨率TDICCD相机调焦功能和调焦精度的实际要求,本文结合相机离轴宽视场光学系统设计特点、交错拼接TDICCD焦平面光机机结构设计特点,设计并实现高精度调焦控制系统,介绍了调焦系统的工作原理及系统组成,并详细分析了调焦系统的参数设计,最后对调焦系统进行了实际测试,对测试数据进行分析。分析结果表明,开环调焦控制精度达到为±7.2 μm满足相机在轨成像调焦精度需求。
[1] 王书新,李景林,刘磊,等.大尺寸焦平面空间相机调焦机构的精度分析[J].光学 精密工程,2010,18(10):2239-2243.WANG SH X,LI J L,LIU L,et al..Accuracy analysis of focusing mechanism in space camera with long-focal-plane[J].Opt.Precision Eng.,2010,18(10):2239-2243.(in Chinese)
[2] 张洪文.空间相机调焦技术的研究[D].长春:中国科学院长春光学精密机械与物理研究所,2003.ZHANG H W.Research on the autofocusing technology for space camera[D].Changchun:Changchun Institute of Optics,Fine Mechanics and Physics,Chinese Academy of Sciences,2003.(in Chinese)
[3] 黄厚田,王德江,沈宏海,等.航空成像系统检调焦技术分析与展望[J].中国光学,2014,7(4):542-551.HUANG H T,WANG D J,SHEN H H,et al..Analysis and prospect of auto-focusing technique for the aerial camera[J].Chinese Optics,2014,7(4):542-551.
[4] 高文,朱明,贺柏根,等.目标跟踪技术综述[J].中国光学,2014,7(3):365-375.GAO W,ZHU M,HE B G,et al..Overview of target tracking technology[J].Chinese Optics,2014,7(3):365-375.(in Chinese)
[5] 苗健宇,张立平,田铁印,等.三线阵CCD立体测绘相机结构实现技术[J].仪器仪表学报,2011,32(10):2183-2189.MIAO J Y,ZHANG L P,TIAN T Y,et al..Realizable technology of light-machine structure for three-line array CCD tridimensional mapping camera[J].Chinese J.Scientific Instrument,2011,32(10):2183-2189.(in Chinese)
[6] 钱曾波,刘静宇,肖国超.航天摄影测量[M].北京:解放军出版社,1992.QIAN C B,LIU J Y,XIAO G CH.Space Photogrammetry[M].Beijing:Publishing House of the Chinese People's Liberation Army,1992.(in Chinese)
[7] 王智,张立平,李朝辉,等.传输型立体测绘相机的调焦机构设计[J].光学 精密工程,2009,17(5):1051-1056.WANG ZH,ZHANG L P,LI CH H,et al..Design of focusing mechanism of space tridimensional mapping camera[J].Opt.Precision Eng.,2009,17(5):1051-1056.(in Chinese)
[8] LIGHT D L.Characteristics of remote sensors for mapping and earth science applications[J].Photogrammetric Engineering & Remote Sensing(S0099-1112),1990,56(12):1613-1623.
[9] WEI ZH ZH,ZHANG G J,LI X.The application of machine vision in inspecting position-control accuracy of motor control systems[C].Proceedings of the fifth international conference on electrical machines and systems,Shenyang,China,2001:1031-1038.
[10] SCAMAN M E,ECONOMIKOS L.Computer vision for automatic inspection of complex metal patterns on multichip modules(MCM-D)[J].IEEE,1995,18(4):675-684.
[11] 虞林瑶,魏群,张天翼,等.中波红外长焦距折反光学系统设计[J].中国光学,2015,8(2):234-240.YU L Y,WEI Q,ZHANG T Y,et al..Design of long focal infrared catadioptric optical system for multi-guided system[J].Chinese Optics,2015,8(2):234-240.(in Chinese)
[12] 李刚,杨名宇.基于联合变换相关的机载航空相机像移测量[J].中国光学,2015,8(3):401-406.LI G,YANG M Y.Image motion measurement for airborne camera based on joint transform correlation[J].Chinese Optics,2015,8(3):401-406.(in Chinese)
[13] REYNOLDSA G,HAMMONDA M,BINNSA L A.Camera correlation focus:an image based focusing technique[J].SPIE,2005 ,5752:103221041.
[14] IWATA T.Precision Attitude and position determination for advanced land observing satellite(ALOS)[J].SPIE,2005,5659:34-50.
[15] 吕世良,刘金国,贾平,等.离轴三反消像散多光谱相机调焦系统设计[J].光学 精密工程,2013,21(8):2154-2160 LÜ SH L,LIU J G,JIA P,et al..Design of focusing system for multispectral camera with off-axis TMA[J].Opt.Precision Eng.,2013,21(8):2154-2160.(in Chinese)
[16] 骆守俊.大面阵中波红外连续变焦光学系统设计[J].光学 精密工程,2012,20(10):2117-2123.LUO SH J.Design of middle infrared continuous zoom optical system with a large FPA[J].Opt.Precision Eng.,2012,20(10):2117-2123.(in Chinese)