空间引力波探测计划-LISA系统设计要点
2015-11-26李静秋
王 智,马 军,李静秋
(中国科学院长春光学精密机械与物理研究所,吉林长春130033)
1 引言
20世纪90年代,欧洲空间局(European Space Agency,ESA)和美国国家航空航天局(National Aeronautic and Space Administration,NASA)合作,开始发展空间激光干涉引力波探测项目—Laser Interferometer Space Antenna(LISA)计划。LISA是为了测量由时空引力波引起的时变应力而设计的,预计可探测到超致密双星、超大质量黑洞并合等引力波源。LISA的工作频段为10-3~1Hz,是地基干涉系统的直接补充(LIGO,VIRGO,TAMA 300 以及 GEO 600)[1-2]。
LISA系统包括3颗相同的卫星,它们组成一个等边三角形,在地球同步轨道,航天器星座质心落后地球20°。每个航天器包含2个自由悬浮的测试质量,每个测试质量作为干涉仪干涉臂末端的反射镜。星座3条臂的任意2条形成一个迈克尔逊干涉仪,通过在航天器间发送和接收红外激光辐射来实现。引力波通过测量干涉臂长的变化进行检测。
2 科学技术要求
科学技术要求是科研团队根据观察到的感兴趣的天体事件所需要的平均引力波探测灵敏度制定的。引力波探测灵敏度h与相关干涉仪臂长变化成比例,即:

式中,L是干涉仪臂长(m),δL是臂长变化(mHz-1/2)。需要注意的是,技术要求是按照引力测量线性谱线的密度给出的。
正如上面所提到的,空间引力波探测的基本原理是利用空间自由悬浮测试质量的间距作为传感器,将引力波信号转化为测试质量间距变化的信号。然后利用迈克尔逊形式的高精度激光干涉仪对这个距离变化进行读出。要达到引力波探测所需要的灵敏度,依靠3个主要因素:
(1)干涉仪臂长;
(2)精确测量两测试质量间距变化的能力;
(3)测量和抑制除引力波外的其他非保守力的能力,保证激光干涉测距系统对引力波信号进行有效检测。
LISA的设计主要集中在这3个方面。首要考虑的是,尽管引力波探测灵敏度要求给定的是天体引力波源位置和偏振的平均,显而易见,给定干涉仪臂长L为5×106km,LISA单臂的干涉测距系统精度必须达到几十个pm Hz-1/2。
3 测量原理及LISA有效载荷
为了实现天基迈克尔逊形式的干涉仪,母航天器上设计有两套激光干涉系统,其中一套用于对接收到的弱光进行锁相放大,干涉臂末端子航天器上的激光系统采用应答机模式。激光从母航天器发出,远端航天器将接收到的弱激光进行锁相放大后返回母航天器,并与母航天器本地激光发生干涉,产生外差频率信号。为了更好地响应引力波的偏振特性,LISA采用3个处于等边三角形顶端的卫星编队。每个卫星都装有2个测试质量,作为3个迈克尔逊干涉仪的端点,形成星间的两套激光干涉仪。空间引力波探测利用自由悬浮的测试质量作为传感器,将引力波信号转化为测试质量间距变化的信号,也就是干涉仪臂长的变化。
激光干涉仪是LISA最重要的有效载荷,系统包含激光器、相位计以及两个可移动光学子系统,均与远端航天器相应部分建立激光链路。除了光学组件,每个移动光学子系统,包含引力波参考传感器,内有自由悬浮的测试质量。这些组件组成了LISA有效载荷的核心,会在下面的章节详述。
光学系统的设计基线实施的是捷联结构;每个干涉臂测试质量间距微小变化的光学测量分成3个测量部分,其概念图见图1。
(1)本地测试质量到本地光学实验台之间的测量;
(2)本地光学实验台到远端光学实验台之间的测量;
(3)远端光学实验台到远端测试质量之间的测量。

图1 LISA系统5×106km臂长测量概念图Fig.1 Concept of LISA's five million kilometers arm measurement
两个独立航天器的主动激光系统采用偏振外差干涉法实现相对位移的测量。每套激光器对应一个光学实验台以及相应的干涉臂。望远镜既是激光接收装置(接收由远处航天器发过来的激光),又是激光发射装置(将本地航天器的激光发射至远端航天器)。采用正交线性偏振技术实现收/发多路技术。每个航天器上的两套激光器使用有轻微差别的光学频率,激光由激光器发出后经光纤耦合导入干涉仪,经分束镜分为一束强光与一束弱光,其中强光(1.2 W)作为出射光,经望远镜系统,发射至远端航天器,同时弱光作为本地激光与远端航天器发射来的入射激光进行干涉,探测器将激光干涉信号转化成电信号,并由相位计进行实时检相。相位计基于数字器件并由超稳晶体振荡器驱动。
精确确定干涉仪臂长变化是很复杂的,航天器与航天器之间由于轨道游离的原因会产生相对运动,从而导致航天器之间存在相对速度。直接受到影响的是干涉仪臂长(名义长度为5×106km),既不相等也不是一个常数。因此,激光频率噪声是影响测量的最主要的噪声源。此外,干涉仪间的差频并不是固定的,主激光器频率必须按照预置的频率进行调制,以维持在光电探测器约20 MHz的动态频率范围。轨道游离还影响有效载荷的机械设计,因为在同一航天器上两套光学系统的视轴名义夹角为60°,并不是一个常数,而是1年内变化的峰值为1.5°(“呼吸角”)。这需要设计一个专门的机构(光学组件跟踪机构)来调整两个光学组件的相对方位。同时,激光从一个航天器到另一个航天器传播5×106km的距离大约需要16 s,传播光束需要在到达接收航天器前调整指向,也就是说对于同一个光学组件,望远镜的出射光束和接收光速并不是平行的。这个偏移量的面外补偿需要6 μrad的周期变化,近似等价于发射光束的发散角。因此,每个光学实验台需要一个提前量角度调整机构来补偿这个影响。
为了抑制由于臂长不等导致的激光器频率噪声,通过 Time Delay Interferometer(TDI)技术实现。这是一个后期数据处理方法,将在轨单个干涉仪测量数据进行TDI处理后,重新组合生成等效的等臂长干涉仪测量数据。这是一个算法,主要实现在不同时间不同航天器上由不同探测器测量的相位信息的时间延迟叠加。实际上,事件延迟干涉法从所有的航天器星座测量数据中,形成了一个等效的等臂长迈克尔逊干涉仪。为了使算法有效,何时准确的采集数据(约30 ns)是至关重要的,转换成苛刻的技术要求为:
(1)每个航天器数据的时间标记;
(2)不同航天器的时间相关性程度;
(3)从航天器下传地面的数据抽样,过滤和插补的质量。
许多光学外差探测器使用微分波前传感来检测测量光束与参考光速之间的波前倾斜。倾斜信息与光学实验台测试质量间的位移测量,用于航天器控制系统实现航天器以及测试质量的姿态调整。
4 顶层系统技术要求
一旦干涉仪的臂长确定,工程上的技术要求可以从应力灵敏度得出。顶层系统的工程技术要求是按照“单链路测量误差”定义的,同时定义了任一干涉臂两测试质量间距离测量的最大误差。通过计算“探测器噪声”到“引力波噪声”的转换公式,建立单链路测量误差和应力灵敏度之间的关系,其体现了测量仪器噪声与引力波灵敏度的比率。
单链路测量误差用pm Hz-/2来表示,不但包括干涉测量系统误差,而且包括非保守力导致的测试质量的运动。因此,为了实现对引力波的有效探测,必须抑制非保守力导致的测试质量的扰动,如太阳辐射压力、电磁场力以及航天器间的引力等。
顶层技术要求主要有:(1)实现臂长的精确测量;(2)减小测试质量由于非保守力产生的加速度。这是两种完全不同种类的误差,为此必须规定两种不同的误差估计:干涉测量系统(Interferometer Measurement System,IMS)和扰动抑制系统(Disturbance Reduction System,DRS)。
IMS和DRS误差频率相关,IMS误差主要在高频(也就是~5 mHz),最大的误差分配为12 pm Hz-1/2,而 DRS 误差频率低于5 mHz,最大的误差分配为 3 ×10-15ms-2Hz-1/2。
5 光学组件
光学组件包含激光干涉仪的光机结构,引力参考传感器(Gravitational Reference Sensor,GRS)包含每个干涉臂测试质量末端。光学组件设计须经过多次迭代[3],从而对不同的构型进行研究和比较。
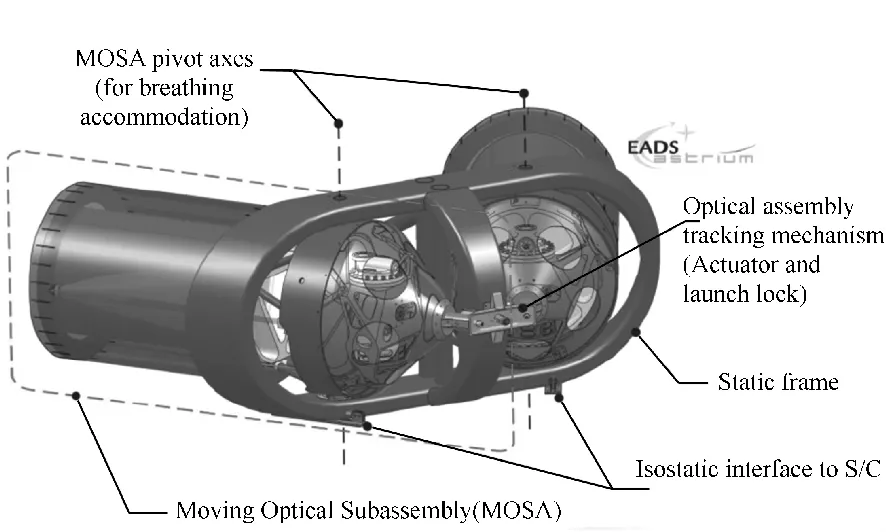
图2 光学组件设计图Fig.2 Design diagram of optical assembly
除了权衡具体的光机结构设计,工业研究还需要权衡主要的设计理念、视场内指向[4]。这涉及一个单一固定的光学子系统,其拥有两个大视场角的望远镜,在单一的光学实验台上有一个GRS(或者两个,一个为备份)和一个移动的小反射镜,用来处理“呼吸角”。与之截然相反的是设计有两套可移动的光学组件,每套光学组件由一个小视场角望远镜,一套光学实验台以及一套GRS组成,光学组件由跟踪机构实现转动。即使视场内指向可以实现技术上合理的设计,设计规划作为其他构型的设计基线,并且,最后的设计方案由Astrium于2008年6月在任务设计评审中提出。
最新的LISA设计在每一个航天器上由两套可移动光学子系统(Moving Optical SubAssemblies,MOSA)组成,为了处理“呼吸角”,保持卫星轨道的稳定性,航天器组成的星座平面与赤道面夹角约为60°。每套MOSA都可以实现与远端航天器组成光学链路以实现激光的发射和接收,主要包括MOSA结构、望远镜、光学实验台以及引力参考传感器。光学组件通过两套独立的激光系统反馈,两套激光系统由背部的光纤连接,相位相关。为了实现外差干涉测量,接收到的皮瓦量级的激光与本地激光发生干涉,获得相位差信息。有效载荷的电子学和激光器系统分布在航天器的周围。图2是光学组件的设计结果。
在每个MOSA中,400 mm口径的离轴望远镜将入射光聚焦在光学实验台上的一个可折叠反射镜上,该反射镜与望远镜的光轴垂直且反射面朝向望远镜的一侧。光学实验台固定在一个碳纤维复合材料的结构上,引力参考传感器也固定在上面。为了保证热弹性稳定所有的组件均采用热绝缘技术安装。光机结构的布局如图3所示。

图3 可移动组件图Fig.3 Diagram of movable assembly
光学实验台也承载着望远镜的光学组件(焦面调整机构,FOC)、发射和接收光学系统、相关的光纤发射器、激光链路初始获取CCD传感器、提前量角度补偿机构、每个航天器上与两套激光器相位相关的参考干涉仪以及用于测试质量轴向位置和侧向姿态精确测量的专用激光干涉仪。
增加的辅助干涉仪包含在MOSA中,主要是为了测量提前量角度有效指向以及发射光束的波前相位变化。光通过光纤传输至MOSA,光机转换器作为光信号的冗余开关。综上,每个MOSA提供29路不同的探测器信号,这些信号携带有外差干涉仪的频率信息。其中,20路信号同时有效,9路提供冷备份。
6 望远镜
为了减小杂散光,避免波前变形,采用离轴两反系统和一个两镜目镜系统设计望远镜[7-8]。其设计主要包括在光学实验台上的一离轴目镜、主镜(M1,抛物面,口径为405 mm)和次镜(M2,双曲面,口径为30 mm)的装配体,主次镜材料均采用微晶玻璃,支撑结构采用CFRP,主次镜间隔为596 mm。入瞳直径为400 mm,位于测试质量的位置。出瞳(直径为5 mm,在最后一个元件203 mm处)的对准通过在最后装配时调整折叠镜来实现,并且由熔石英目镜系统对光束进行准直。此设计提供的有效口径为400 mm,足够用于进行提前量角度调整的±0.02°的视场角,并且波前误差超过了设计要求。
望远镜的调焦机构用于补偿在轨和地面不同状态下望远镜结构尺寸的变化,修正主次镜支撑结构由于真空放气导致的主次镜间距变化,同时修正随时间产生的不可知因素导致的像面移动。调焦机构驱动器的主要要求是在工作状态下,可以实时地获得入射/输出波前质量。实际上,对于LISA来说,光学系统像差的对准误差是至关重要的,因为这些误差使远场偏离理想球面波。偏离会使发射信号的航天器产生姿态指向抖动,导致位相测量时接收航天器在测量两测试质量间距离时产生译相错误。
作为一个可选项,为了直接测量望远镜结构的稳定性,提出了一个“光学桁架”(optical truss)的概念。为了实现光学桁架[8]的测量,激光束中的一小部分被截取,并离开望远镜分布在次镜支撑环均布的3个位置上。这束光与当地光学实验台上发出的准直振荡器激光混合,产生一个外差信号。与光学实验台上产生的参考信号一起,可以检测出从光学实验台到望远镜出瞳之间皮米量级的光程变化。为了不影响远场波前质量,光学桁架截取的光束产生的光晕一定要尽可能的小,因此,截取的光束尽量在光束边缘选取,既便如此,在高斯强度分布图上已经显示出显著的下降。
7 光学实验台
与上面描述的捷联测量原理相一致,光学实验台包含3个干涉仪:主要的科学干涉仪、测试质量光学读取干涉仪以及参考干涉仪。其他组件也安装在光学实验台上,这些组件主要是为了完成一些辅助功能,尤其是:辅助干涉仪用来测量提前量补偿机构的机械位移,监视二极管用来对发射激光束进行功率监视,以及CCD用来建立星座间的激光链路,特别是远端航天器激光束的获取。
实验台基板采用轻质微晶结构,为整个科学链路中所有相关的光程提供足够的尺寸稳定性基础。在光学实验台的抛光表面上,使用氢氧化催化粘结剂来固定熔石英光学元件。实验台以120°间隔均匀安装在CFRP(Carbon Fiber Reinforced Polymer)结构上,实验台与CFRP结构连接部分镶嵌有连接环。

图4 光学实验台Fig.4 Diagram of optical bench
光学实验台目前的设计布局如图4所示。发射端激光(LO1)由激光器系统经过光纤传输到望远镜,然后发射到远端航天器。通过偏振分光器来实现接收和发射光束的分离,接收到的光束与其他光学实验台激光器发出的激光(LO2)进行干涉,由四象限光电探测器检测。偏振分光器立方镜的直角边用来将光束耦合进望远镜背部光学系统。同样地,LO1可用到其他光学实验台,通过路径选择,一小部分的光通过光纤连接两个光学实验台。为了减少共有模式错误,光学实验台可以在相反方向同时传输LO1和LO2。
测试质量相对于光学实验台位置和姿态的读取是通过偏振外差干涉测量法结合微分波前传感来实现的。LO1从测试质量的前表面反射并与LO2干涉以提供外差信号。
光学实验台包含一个LO1-LO2参考干涉仪,主要为了相位消除。它为光学实验台上所有的干涉仪定义了相位参考点,它的温度稳定性可以保证独立通道间的相位相关。LO1-LO2差拍信号可被其他外差信号直接用于抵偿共有模式误差。
整个系统的光学成像设计是将提前量驱动器、测试质量以及所有光电二极管都位于光瞳面内,避免了成像在光电二级管上的光束波前倾斜转换误差。这是高质量微分波前传感的首要条件,波前传感用来对光学实验台、入射波前和测试质量的倾斜量以纳弧度分辨率进行测量。
进入望远镜的发射光束能量约为2 W,然而接收光束的总能量为200 pW。因此,这与杂光的影响直接相关,必须严格控制,尤其是高功率的入射光束。在望远镜系统中,采用直接线性偏振技术来抑制入射光和接收光之间的杂光。
光学实验台同时也容纳望远镜的部分光学系统,称之为“望远镜后光学”。包括望远镜目镜、调焦机构以及光束路径选择。因此,光学实验台的一个特定区域不能被其他设备占据。
8 引力参考传感器
引力参考传感器[9]包括一个GRS头部以及相关的电子学。GRS头部包含一个真空罩,罩内由围绕测试质量的电极房和闭锁机构组成。为了创造一个接近于测试质量的对称引力场,在真空罩的内部设计有配重。一套极紫外光组件通过光纤连接光源和GRS头部。
闭锁机构用来将测试质量锁定在一个安全的位置使之能承受发射过程的振动以及移动测试质量到电极房的中心,并且能以尽量低的速度释放测试质量(<5 μm/s),移交给静电控制系统。
电荷管理装置在必要时给测试质量放电,不允许与测试质量有机械接触。电荷系统对测试质量的充(放)电操作主要是利用极紫外光照射在测试质量以及电极房表面产生的光电效应。
通过静电方法来实现动作以及测试质量位置的读取,其需要沿非敏感轴采用非科学操作,静电读取的原理是通过射入电极的方式在测试质量上产生一个高频率电压信号。另外一套电极用于静电促动和传感,测试质量与电极房的相对运动导致的电极与测试质量间距离的变化,以及由此产生的相关电容。通过一套基于参数的桥式微分电容测量仪来实现检测测试质量的运动。GRS前端电子学负责电容传感器的读取以及测试质量促动所需要的电极房电极的电压。
静电传感和促动,以及测试质量的光学读取都是由本地光学实验台上的干涉仪来实现,整个光学实验台包含在无拖曳姿态控制系统[10]内。航天器的微推进系统可以使航天器跟随测试质量按它的测地线运动,保护其不受外部扰动的影响。
9 相位测量系统
相位测量系统的主要功能是对2~20 MHz频率带的正弦信号进行相位测量,它的主要组件有:频率分类电子学系统(为测量提供参考频率);相位计前端电子学以及相关的后端数字信号处理器。
相位测量系统的基线是高精度(约10-5rad Hz-1/2)测量与内部超稳定晶振器相关的正弦信号。相位测量原理基于数字锁相环,锁定信号进行测量,与锁定的数字晶振器频率共同实现基本的相位测量。原始相位测量数据在相位计内进行处理,有3个主要目的:
(1)从科学数据流中提供相位测量数据。为达到这个目的,原始测量数据被抽选过滤成1 Hz带宽的低通滤波信号,在3.3 Hz处采样、编码,采用处理时间印记注释并打包。
(2)为无拖曳姿态控制系统,提供测试质量沿敏感轴的线性位移和两个角度的测量。为了达到这个目的,选出的相位测量数据进行处理,体现在10Hz处的微分波前传感信号。
(3)为激光频率控制提供作为传感器信号的频率测量数据。为了达到这个目的,将选出的数据进行处理,体现在约50 kHz带宽的频率测量数据。
除上面说明的主要功能外,相位测量系统还需履行一些必要辅助功能,以便地面对数据进行更进一步的处理。尤其是,为了测量超稳定振荡器频率噪声,将激光进行调制。其它的正弦信号也被用于传输时间信号,使不同航天器的时间具有相关性。这些信号被嵌入旁频带,远离载波频率几个GHz。相位测量系统因此也测量旁频带的相位,这些频率具有较低的20 dB信号功率。总之,相位测量系统需要的通道数是58,然而只有40个通道是有效的,其余均为冷备份。
10 激光器系统
LISA的干涉测量方案需要在每一个航天器上配置两套独立的Nd∶YAG(波长为1 064 nm)激光光源,分别表示为LO1和LO2。整个LISA星座工作在4~20 MHz的频率范围,为确保每一个光电探测器采集到外差频率信号,激光器以约几个MHz不同的频率工作。在安装到各自的航天器光学实验台上时,每个独立的激光振荡器均包含偏振保持的单模光纤。
Nd∶YAG采用非平面环振荡器作为主振动器。部分输出光输入可调的参考频率进行预稳定处理。参考频率无法精确确定,主要的因素:光学参考腔具有可调的长度,旁频带锁定在一个固定长度腔体且频率可调;LISA相位测量系统中不相等臂长的干涉仪产生错误信号。
通过频率控制器调整参考频率到指定的点。误差信号反馈到非平面环振荡器(NPRO),积分器通过调整晶体温度移除任何直流成分。频率控制环不但利用可调的参考频率信息,而且也利用干涉臂作为延迟线:激光噪声的测量是通过比较实际的激光信号和通过星座往返而延迟的该信号的复制信号来实现的,这通常被称为锁臂。
非平面环振荡器输出的主要部分耦合进光纤耦合光电调制器,在一个单一带宽设备中产生旁频带调制信号。为了满足最后放大到2 W能量的需求,振荡器的输出光能量必须达到30 mW。放大是在双包层活性光纤里,通过备份的光纤耦合泵浦二极管实现。这些泵浦二极管通过调整二极管电流控制能量输出。放大系统由光学隔离器保护,以防后面反射的影响。
11 结论
引力波是爱因斯坦提出的关于广义相对论的四大预言之一,未来在引力波探测的研究中所获得的突破,将可能比其它预言产生更为巨大而深远的影响,甚至将大大促进人类文明的进程。到目前为止,引力波是广义相对论中最后一个未被直接观测到的预言。空间引力波探测的发展,不仅是为了检验爱因斯坦的广义相对论,而且可能为天文学和宇宙学开拓一个新的观测窗口。天体引力波源十分遥远,信号微弱,导致直接测量非常困难,LISA计划是最早开始发展的空间引力波探测项目,也是目前国际上发展最成熟的空间引力波探测计划。随着人们对引力波波源认识的进步,相关精密测量和空间技术的发展,特别是激光干涉技术、惯性传感技术、无拖曳控制技术以及超精密加工与制造技术的发展,使得空间引力波探测成为可能。
[1] SALLUSTI M,GATH P,WEISE D,et al..LISA system design highlights[J].Classical and Quantum Gravity,2009,26:094015.
[2] 罗子人,白姗,边星,等.空间激光干涉引力波探测[J].力学进展,2013,43(4):415-447.LUO Z R,BAI SH,BIAN X,et al..Gravitational wave detection by space laser interferometry[J].Advances in Mechanics,2013,43(4):415-447.(in Chinese)
[3] GATH P F,WEISE D,SCHULTE H R,et al..LISA mission and system architectures and performances[J].J.Phys.Conf.Ser.,2009,154:012013.
[4] WEISE D R,MARENACI P,WEIMER P,et al Alternative opto-mechanical architecture for the LISA instrument[J].J.Phys.Conf.Ser.,2008,154:012029.
[5] 李艳杰,金光,张元,等.成像与激光发射系统的共口径设计与实验[J].中国光学,2015,8(2):220-226.LI Y J,JIN G,ZHANG Y,et al..Co-aperture optical system for imaging and laser transmitting[J].Chinese Optics,2015,8(2):220-226.(in Chinese)
[6] 吴从均,颜昌翔,高志良.空间激光通信发展概述[J].中国光学,2013,6(5):670-680.WU C J,YAN CH X,GAO ZH L.Overview of space laser communications[J].Chinese Optics,2013,6(5):670-680.(in Chinese)
[7] VERLAAN A L,HOGENHUIS H,PIJNENBURG J,et al..LISA telescope assembly optical stability characterization for ESA[J].SPIE,2012,845003:1-7.
[8] WEISE D,MARENACI P,WEIMER P,et al..Opto-mechanical architecture for the LISA Instrument[C].7th Int.Conf.on Space Optics,Toulouse,France,14-17 Oct,2008.
[9] DOLESI R,BORTOLUZZI D,BOSETTI P,et al..Gravitational sensor for LISA and its technology demonstration mission[J].Classical and Quantum Gravity,2003,20:S99.
[10] GATH P,SCHULTE H R,WEISE D,et al..Drag free and attitude control system design for the LISA science mode[C].AIAA Guidance,Navigation,and Control Conf.Hilton Head,South Carolina,USA,August 20-23,2007.