激光距离选通成像门宽对图像信噪比影响
2015-11-26王锐
王 锐
(1.激光与物质相互作用国家重点实验室,吉林长春130033;2.中国科学院长春光学精密机械与物理研究所,吉林长春130033)
1 引言
自激光成像技术产生以来,人们一直在寻求一种新型的探测成像技术,相对传统的微波雷达探测而言,激光探测具有分辨率高、体积小巧、抗干扰力强和适用范围广等优点。相对于红外热成像技术,激光成像技术不受周围环境温度影响,对比度稳定,在天气条件恶劣、低照度、背景复杂的条件下,仍然能获取目标的强度像和距离像,并且还可以生成高分辨率的三维图像[1]。
20世纪90年代以来,为克服大气后向散射影响、提高系统作用距离。欧美等发达国家开始重视距离选通技术的研究,该项技术是解决远距离激光主动成像散射噪声问题的主要技术手段。许多国外科研机构,如瑞典国防研究中心(FOI)[2]、英国 BAE 公司[3]、美国 INTEVAC 公司[4]和 Goodrich 公司 SUI小组[5]、加拿大 OBZERV公司[6]、德国光电与模式识别研究所(Research institute for optronics and pattern recognition)[7]等,都对该技术进行了深入研究,而且部分装备已研制成功。
早期的激光距离选通成像系统更加关注选通门宽,希望通过更小的门宽获得更加精确的特定距离图像信息,更好地抑制大气后向散射噪声[8]。但同时,小的门宽意味着更加严格的测距精度[9],限制了激光距离选通成像系统应用范围。
本文为了明确选通门宽与图像信噪比关系,设计并构建了外场实验系统,获得了丰富的实验数据,并分析不同门宽条件下的图像效果,证明了距离选通成像系统对选通门宽的要求并不严格,完全符合实际应用的需求。
2 距离选通成像工作原理
距离选通技术是借助精确时钟同步技术、大功率脉冲激光驱动技术、选通增强摄像机(ICCD)等发展起来的。图1为距离选通技术原理图。脉冲激光和选通摄像机通过控制电路同步。在ta时刻,激光光源发射激光脉冲,选通摄像机关闭。在激光脉冲传输到达目标并反射回选通摄像机所处位置(tb时刻)之前,选通摄像机保持关闭。这样ta到tb时刻脉冲激光传输过程中产生的后向散射光无法进入选通摄像机形成噪声。当反射回的脉冲激光到达选通摄像机所处位置(tb时刻)时,选通摄像机打开,接收返回的脉冲激光并成像。而后重复这一过程,关闭摄像机,并发射下一个激光脉冲。这样形成的目标图像主要与距离选通时间内的目标反射光有关[3]。如果选通门开启时间长度和激光脉宽都很窄,使得成像系统只接收目标附近的反射光信号,消除大部分的后向散射光,就能大大提高系统的成像对比度。距离选通成像方式可以选择成像距离并控制成像景深,可以抑制后向散射,能够在薄雾、雨、雪等恶劣天气条件下成像。
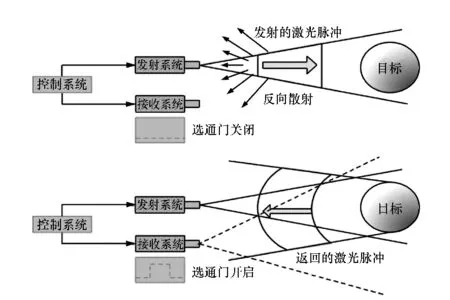
图1 距离选通成像原理图Fig.1 Block diagram of range gating imaging
(1)延迟时间
对于距离选通成像系统,从发出一束脉冲激光到选通门开启接收目标回波信息的延迟时间是根据目标与成像系统间距离计算得出的[10],因此,需要根据实时测距信息设定选通门开启时间,在不考虑其他系统延迟情况下,选通门开启时间可表示为:

式中,t1为延迟时间,L为目标到成像系统间距离,c代表光速。
(2)选通门宽
而选通门宽决定了成像区域的景深,只有在景深范围内的目标才能够被清晰成像,测距信息存在一定的精度范围,为保证能够在应用测距信息情况下对目标成像,需满足以下条件:

式中,2ΔR代表测距精度(即 ±ΔR),tpulse代表激光脉冲宽度,tgate代表选通门宽。当tgate>tpulse时,tpulse忽略不计,测距精度只与tgate选通门宽有关。例如,测距精度为±150 m,利用式(2)计算得到tgate+tpulse=2 μs,通常固体激光器脉冲宽度为ns量级,可忽略,则 tpulse≈2 μs。
(3)距离分辨率
距离分辨率是表征距离选通成像系统通过调整延迟时间对目标前后不同距离部分进行成像的能力。

式中,ΔR代表距离分辨率,Rn+1,Rn分别代表两个不同的成像距离,tclk代表延迟时间步进间隔。例如,选通控制系统步进间隔为2.5 ns,利用式(3)计算得到距离分辨率ΔR=0.375 m。
3 激光距离选通成像作用距离模型
根据激光雷达作用距离方程[11]:

式中:PS为激光器单脉冲能量;Pr为探测器接收能量;ηt为发射系统透过率;ηr为接收系统透过率;R为成像系统到目标的距离;TA为成像系统到目标的大气透过率;ρ为目标反射率;S为目标截面积;θt为激光发散角;D为接收系统口径。对于发射系统透过率ηt和接收系统透过率ηr,考虑到光学系统结构不会太复杂,发射系统按0.9计算,接收系统按0.8计算。
取作用距离3.5 km,所经过的大气路径为斜程路径,利用软件计算,在532 nm处,大气透过率按 TA=0.6 计算[12]。
通常情况下目标全部位于激光光斑范围内,故此时的目标面积要用目标上被激光照亮的全部面积来计算,初步拟定为7 m×7 m。
光学系统接收孔径取D=100 mm,ICCD相机最小可探测能量为1×10-15J[13]。激光发射系统发散角为 5 mrad。由上式可得,为了实现3.5 km有效探测,需采用单脉冲能量10 mJ固体激光器进行照明。
4 构建外场实验系统
根据以上作用距离模型分析,构建外场实验系统,实现3.5 km远距离选通成像探测。整套实验系统如图2所示。采用荷兰Lambert公司的ICCD相机配合长焦镜头构建接收成像系统,采用法国Quantel公司的固体脉冲激光器作为照明光源。研制选通控制系统,实现激光器与ICCD相机的高精度同步控制,具体参数如下:
(1)ICCD相机
a)CCD传感器:pixel数为 1 379 pixel×1 024 pixel,pixel尺寸为 10.3 μm;
b)最大帧频:25 FPS;
c)像增强器分辨率76 lp/mm。
d)亮度增益:30 000 lm/m2/lx。
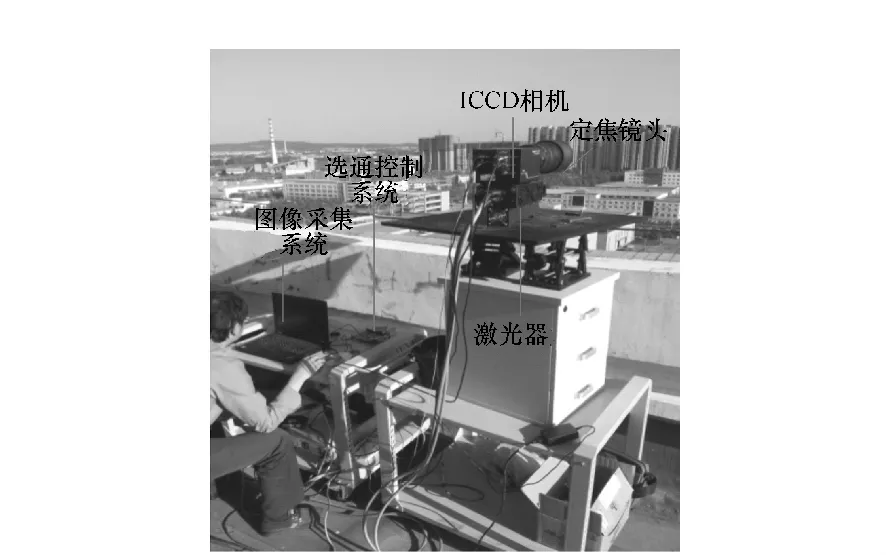
图2 距离选通成像外场实验系统Fig.2 Experiment system of range gating imaging
(2)定焦镜头
a)F#2.8;
b)焦距300 mm。
(3)激光器
为了与 ICCD工作波段相匹配,需采用532 nm脉冲激光器。需利用信号发生器对激光器进行外触发控制。所需激光器参数估算如下:
a)输出波长:532 nm;
b)脉宽:10 ns;
c)重频:100 Hz;
d)单脉冲能量:>10 mJ。
(4)选通控制系统
a)计时步进:2.5 ns;
b)最小门宽:2.5 ns;
c)距离分辨率:0.375 m;
实验过程中,采用激光测距机首先获得测试系统与目标之间的直线距离,换算为同步延时参数输入选通控制系统,实验开始后,首先由选通控制系统触发激光器,发射一束脉冲激光,同时,根据所设定的距离延时参数、激光器触发延时参数及ICCD相机门控延时参数,在脉冲激光回波到达ICCD像面时触发像增强器高压,选通门开启,接收回波信号成像。
5 实验结果及数据分析
在3.5 km处对楼体目标进行了不同门宽条件下的距离选通成像,实验结果如图3所示。图像采集过程中保证不同门宽条件下的像增强器增益电压相同,以此来对比不同门宽条件下的图像信噪比。

图3 不同门宽条件下距离选通成像结果Fig.3 Range gating imaging results with different gate width
采用国际通用图像信噪比计算方法,如式(5)所示。

式中,μ(DN)代表图像灰度均值,σ(DN)代表灰度值标准偏差[14]。利用该算法对不同门宽条件下所采集图像进行计算,信噪比计算结果如图4所示。
由计算结果可以看出,随着门宽增加,信噪比逐渐降低。图像当中的楼梯尖顶目标在噪声较低时,其外部形态清晰可见,随着门宽增加,尖顶目标周围出现大量噪声点,从门宽2 000 ns开始,尖顶附近噪声逐渐增加,使其外部形态模糊不清。采用相关自动目标识别算法[15]对尖顶目标图像进行自动识别,识别结果显示,门宽小于2 000 ns时,识别正确率在85%以上,完全满足实际工程化应用需求。而而2 000 ns门宽对应的测距精度为±150 m,由此可见,距离选通成像系统对测距系统要求较低。
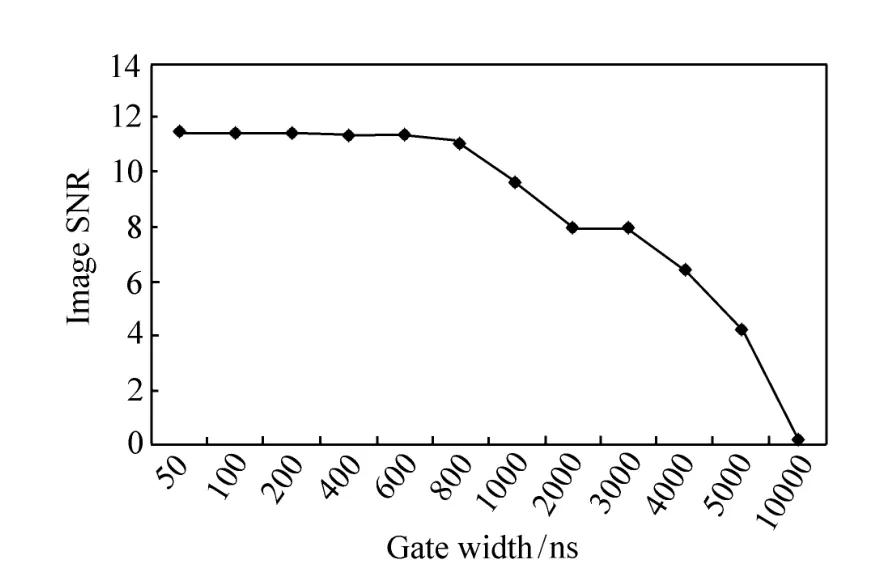
图4 选通门宽与图像信噪比关系曲线Fig.4 Curve of relation between gate width and image SNR
5 结论
本文在建立激光距离选通成像作用距离模型的基础上,构建外场实验系统。在不同门宽条件下获得距离选通图像,并采用国际通用的信噪比计算方法对实验图像进行计算。计算结果表明,随着选通门宽的增加,图像信噪比逐渐降低,完全符合激光选通成像理论。但研究发现,门宽不大于2 000 ns(对应的测距精度为±150 m)的情况下,图像信噪比稳定在8以上,图像质量完全满足自动目标识别要求,充分证明了距离选通成像技术可扩展性和兼容适应性。本文研究结果对于距离选通成像技术应用推广有着重要意义。
[1] 张健,张雷,曾飞,等.机载激光3D探测成像系统的发展现状[J].中国光学,2011,4(3):213-230.ZHANG J,ZHANG L,ZENG F,et al..Development status of airborne 3D imaging lidarsystems[J].Chinese Optics,2011,4(3):213-230.(in Chinese)
[2] PIERRE A.Long-range three-dimensional imaging using range-gated laser radar images[J].Optical Engineering,2006,45(3):034301:1-10.
[3] IAN B,STUART S D,JEREMY W C.A low noise,laser-gated imaging system for long range target identification[J].SPIE,2004,5406:133-144.
[4] VASYL M,GARY K,OVE S.Laser radar:from early history to new trends[J].SPIE,2010,7835:783502-30.
[5] JESSE B,ROBERT B,MARTIN E.High speed short wave infra-red(SWIR)imaging and range gating camera[J].SPIE,2007,6541:654106-12.
[6] DENI B,SYLVIANE L,LOUIS D.On the safe use of long-rangelaser active imager in the near-infrared for homeland security[J].SPIE,2006,6406:1-9.
[7] HLERB G,LUTZMANNP,ANSTETTG.3D imaging with rangegated laser systems using speckle reduction techniques to improve the depth accuracy[J].SPIE,2008,7113:711307-11.
[8] 王锐.多束部分相干光抑制光强闪烁效应的仿真实验研究[J].发光学报,2014,35(7):835-839.WANG R.Simulation experiment of using multiple partially coherent beams to limit laser intensity scintillation effect[J].Chinese J.Luminescence,2014,35(7):835-839.(in Chinese)
[9] 胡进忠,余晓芬,刘媛媛.基于激光多边法的坐标测量系统自标定研究[J].电子测量与仪器学报,2014,28(2):130-136.HU J ZH,YU X F,LIU Y Y.Research of self-calibration of 3D coordinate measurement[J].J.Electronic Measurement and Instrumentation,2014,28(2):130-136.
[10] 施智勇,潘晓声,张谦.利用延时法进行高精度脉冲激光测距[J].光学 精密工程,2014,22(2):252-258.SHI ZH Y,PAN X SH,ZHANG Q.High-precision pulsed laser measuring distance by time delay method[J].Opt.Preci-sion Eng.,2014,22(2):252-258.(in Chinese)
[11] 王锐.激光红外主被动复合导引系统[J].中国光学,2013,6(4):536-543.WANG R.Compound guided system with active laserimaging and passive infrared imaging[J].Chinese Optics,2013,6(4):536-543.(in Chinese)
[12] KLASÉNL,STEINVALLO,BOLANDERG,et al.Gated viewing in the atmosphere-a studyof performance limits[J].SPIE,2002,4723:57-68.
[13] FU B,YANG K CH.Analysis of MCP gain selection for underwater range gated imaging applications based on ICCD[J].J.Modern Optics,2010,57(5):408-417.
[14] 庞春颍,张涛.激光主动成像系统信噪比模型的研究[J].光学 精密工程,2008,16(2):319-324.PANG CH Y,ZHANG T.Signal-to-noise ratio model of laser active imaging system[J].Opt.Precision Eng.,2008,16(2):319-324.(in Chinese)
[15] 王灿进,孙涛,石宁宁,等.基于双隐含层BP算法的激光主动成像识别系统[J].光学 精密工程,2014,22(6):1639-1647.WANG C J,SUN T,SHI N N,et al..Laser active imaging and recognition system based on double hidden layer BP algorithm[J].Opt.Precision Eng.,2014,22(6):1639-1647.(in Chinese)