基于线圈分割技术的电-机械转换器特性研究
2015-11-25罗良维张弓梁济民彭忠凯陈贤帅
罗良维张 弓梁济民彭忠凯陈贤帅
1(广州中国科学院先进技术研究所 广州 511458)
2(广东工业大学机电工程学院 广州 510006)
3(深圳先进技术研究院 深圳 518055)
基于线圈分割技术的电-机械转换器特性研究
罗良维1,2张 弓1,3梁济民1彭忠凯1,2陈贤帅1
1(广州中国科学院先进技术研究所 广州 511458)
2(广东工业大学机电工程学院 广州 510006)
3(深圳先进技术研究院 深圳 518055)
基于线圈组合变换后的电感与电阻对时间常数与电流的影响,文章对载流线圈组采用新型线圈分割及组合变换方法,进而对电-机械转换器的线圈组的电压加载响应时间、输出电磁力及加速度进行研究。结果表明,相对于单线圈组串联,多个线圈组并联后,电-机械转换器的的频率约为 500 Hz,线圈长度和电流都得到提高,电磁力的峰值达到 276.4 N,增大到原来的 16 倍多,加速度达到 27.64 g。由此可知,该技术能够实现高响应特性和大推力控制效果。
电-机械转换器;线圈分割;特性
1 引 言
电-机械转换器是电液比例控制元件的关键驱动元件,它可将外界输入的电压信号连续成比例地转换成往复直线位移,可以产生同尺寸结构2.5 倍的电磁力,并因其高线性和小滞环特性而受到广泛关注[1]。但是传统结构的线圈组件在运动过程中,磁性材料内部易产生涡流,使线圈产生的电磁力减小。同时由于线圈组件固有特性的限制,导致其无论是在响应时间还是在响应速度上都不是很快[2]。开发高响应和大推力的电-机械转换器,是电液比例控制技术的发展趋势[3,4]。
国内外很多学者和研究机构都对此进行了研究。德国亚琛工业大学(RWTH Aachen)流体传动及控制研究所研制的电-机械转换器[5]频响大于 200 Hz。美国加利福尼亚州(California)航天局(CSA)机构研制出的电液伺服阀直接驱动式电-机械转换器[6],频宽达到 300 Hz。浙江大学李其朋研制的永磁极化、双向驱动能力的电-机械转换器具有较小的滞环(<2%)和较高的频响(140 Hz)[7]。
文中针对载流线圈,采用新型线圈分割并以串并联组合方式进行对比分析,通过改变电阻及时间常数以减少线圈两端的加载响应时间,可以大大提升动圈式电-机械转换器响应特性和输出电磁力。
2 结构与原理
拟研究的动圈式电-机械转换器主要由永磁铁、载流线圈、推力线圈骨架、衔铁、壳体、导向销、保护盖和输出轴等组成,具体见图1。壳体内壁圆周上固连有若干片环形分布的瓦型永磁体,衔铁位于环形分布的永磁体内,且与壳体的一端用螺钉固连。载流线圈缠绕在推力线圈骨架上,并与输出轴相连,通过一导向销,浮动于永磁体与衔铁之间的气隙内,并通过密封碗与外界隔开。
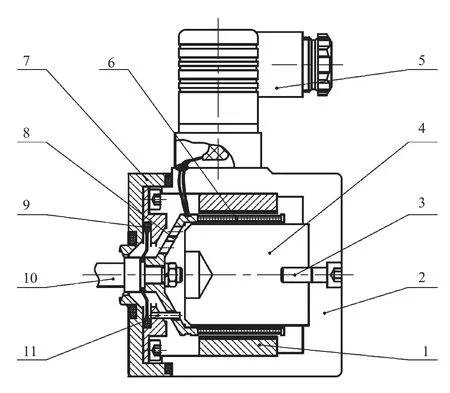
图1 电-机械转换器结构图Fig.1 Schematic of the proposed EMC
控制原理[8]如图2 所示,输入信号电压 ui经放大器处理后,加载到控制线圈,连同推力线圈骨架在永磁体提供的恒定磁场中,受电磁力 Fcd作用而产生位移 xc,从而带动输出轴一起运动。动圈组件由位移传感器检测位置误差,然后转换成信号电压,补偿到输入信号 ui,作为纠偏电压ue,以保证动圈组件保持在所需要的正确位置。电磁力的大小和方向,取决于线圈中控制电流 i的大小和方向。
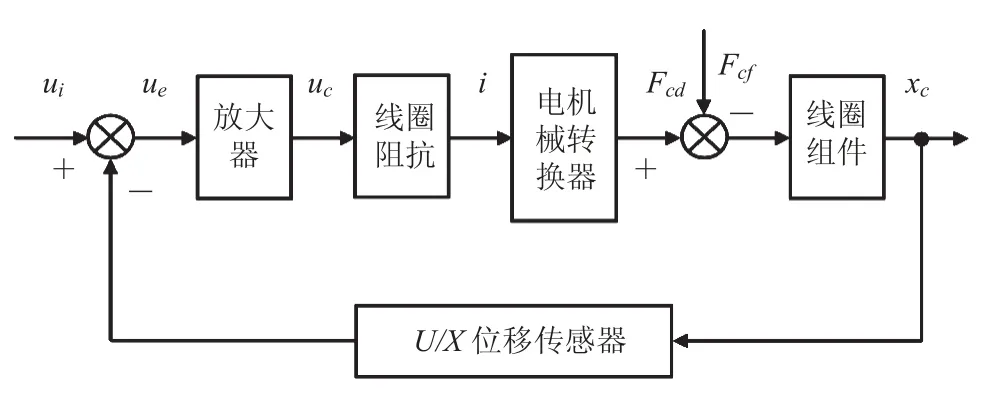
图2 电-机械转换器控制原理Fig. 2 Control principe of the EMC
3 线圈组设计
目前常用的线圈绕线方式为单线圈式,响应速度及电磁推力提升有限,难以满足现节能环保和高效快速的要求[9]。文中将原线圈平均分为多段,构成并联线圈组件。可大大减少了线圈能耗,而且能满足大输出力和高频响应性的要求。
在单线圈输入电流 I 不变的情况下,电磁铁的响应时间 t:

其中,I 为电流(A);U 为电压(V);R 为线圈电阻(Ω);L为线圈电感(H);T=L/R 为时间常数(s)。
由于输入电压一定时,线圈的电阻、电感影响整个电路的时间常数和电流大小,因此只要改变电阻和电感大小就可以实现电-机械转换器的输出力及响应时间。
通过分析线圈尺寸和线圈阻抗之间的关系,可知线圈电感与电机线圈(绕线部分)长度、直径及线圈匝数的平方成正比。为了达到高响应,在设计时必须降低线圈电感。
电感量 Li表示线圈本身固有特性,与电流大小无关,其表达式如下:

其中,Ci为系数,与线圈(绕线部分)长度 li及直径 Di有关;Nc为线圈匝数;Di为线圈直径,单位:m。
通过分割长线圈改变为短线圈组,保持电机尺寸参数一定,改变线圈的匝数调整线圈电阻值和电气时间常数。
通过输入控制信号操作电机控制电路板驱动电路分别控制串、并联电路电子开关 S1、S2、S3、S4的连通和断开,实现组合线圈的串联、并联动作。对该电-机械转换器装置切换后整个电路中线圈的电感 L 和电阻 R 的进行分析,如图3所示。
串联电路中,如图3(a)串联环境下,假设:
① S1电路:开关 K1、K2、K3、K4闭合,电感 LS1,电阻 RS1;
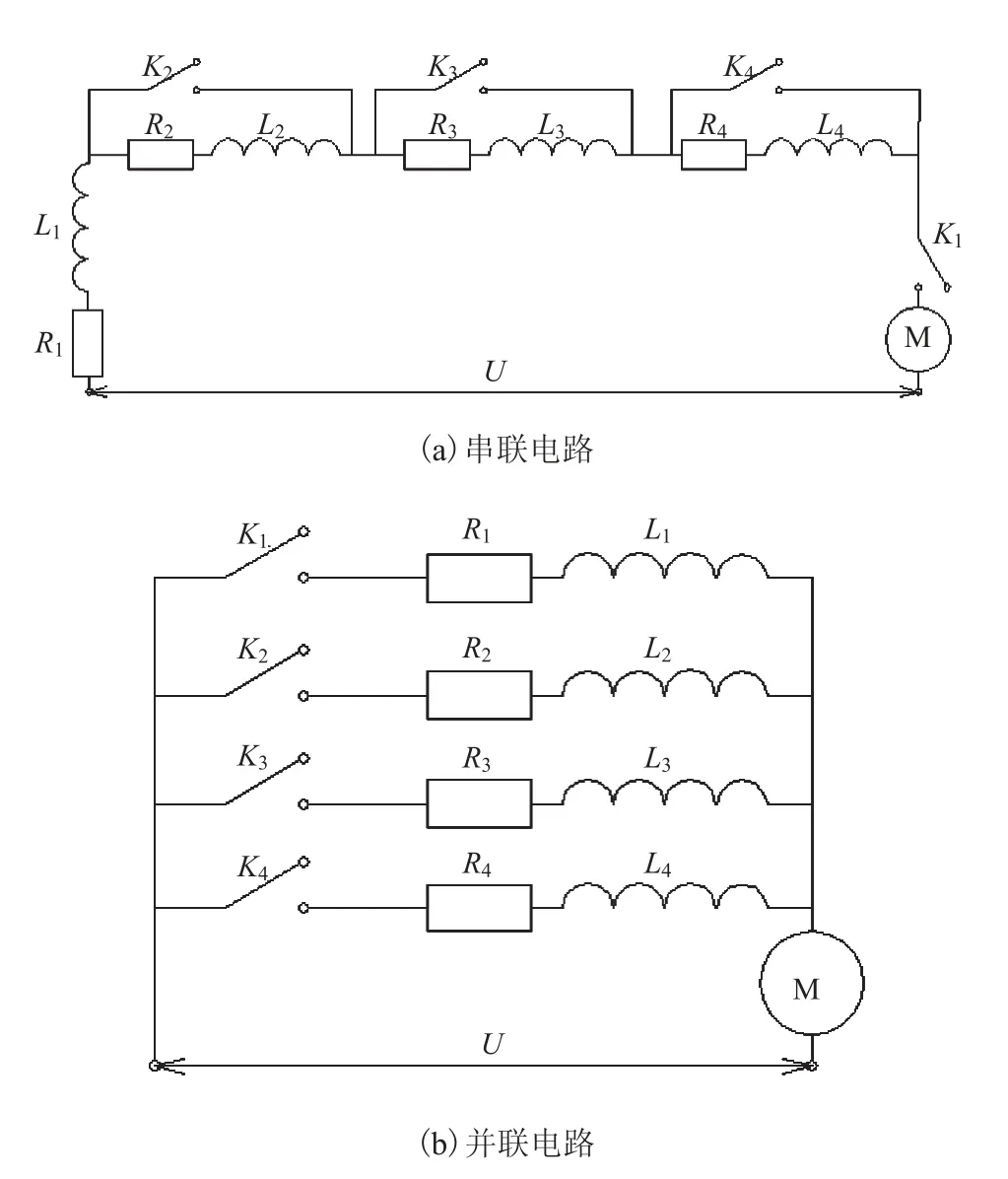
图3 线圈电路示意图Fig. 3 Schematic of coils circuits
② S2电路:开关 K1、K3、K4闭合,K2断开,电感 LS2,电阻 RS2;
③ S3电路:开关 K1、K4闭合,K2、K3断开,电感 LS3,电阻 RS3;
④ S4电路:开关 K1闭合,K2、K3、K4断开,电感 LS4,电阻 RS4;
采用并列式绕线方式的串联环境下,两线圈组耦合系数为 1,串联线圈组的电感 L、电阻 R分别为:

并联电路中,如图3(b)并联环境下,假设:
① P1电路:开关 K1闭合,开关 K2、K3、K4断开,电感 LP1,电阻 RP1;
② P2电路:开关 K1、K2闭合,开关 K3、K4断开,电感 LP2,电阻 RP2;
③ P3电路:开关 K1、K2、K3闭合,开关 K4断开,电感 LP3,电阻 RP3;
④ P4电路:开关 K1、K2、K3、K4闭合,电感 LP4,电阻 RP4;
采用并列式绕线方式的并联环境下,不考虑互感,则线圈组的电感 L、电阻 R 分别为:

平均分割后的线圈组件串联线圈组阻抗增加,线圈组件并联线圈组阻抗减少。
4 建模与仿真
4.1 频率特性分析
线圈组电路两端在稳定输入电压 ui不变的情况下,工作线圈组电路两端输出的响应电压 uc:
其传递函数 G(s):

建立此开环传递函数的结构模型,如图4所示。
图4 传递函数图Fig.4Transfer function diagram
对所建立的模型进行求解,通过 MATLAB仿真分析,得到频率特性曲线,如图5 所示。
从图5 中可以看出,串联和并联设计在频宽500 Hz 范围内幅值变化比较小;随串联组数增加,线圈组响应的滞环增加;并联组数增加对线圈组响应基本没有影响。
4.2 阶跃响应分析
在工作气隙内,根据载流控制线圈在均匀磁场中的受力,可得动圈组件空载力特性[10],
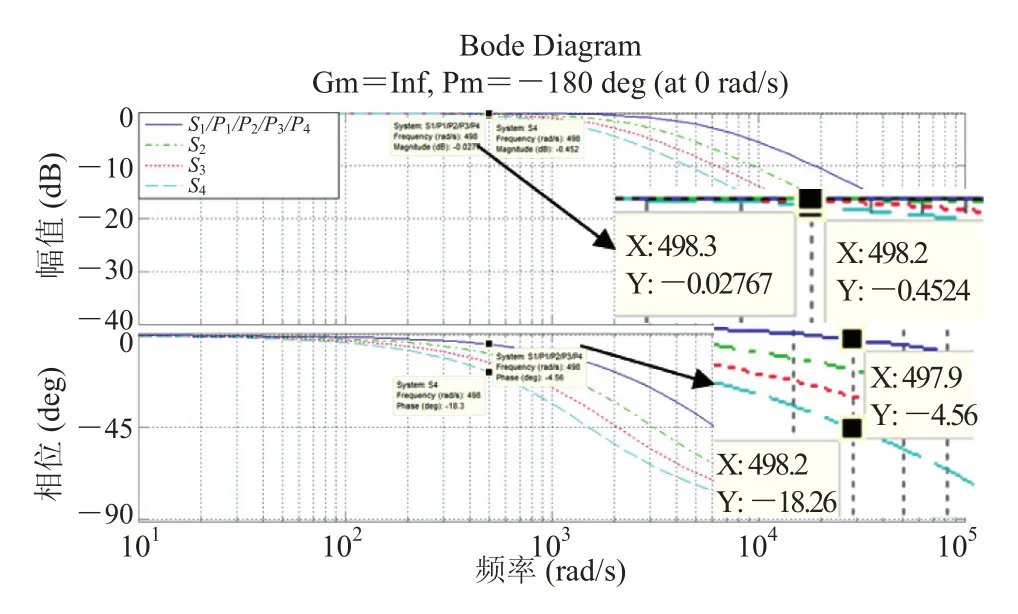
图5 仿真频率特性曲线Fig. 5 Curve of simulation frequency characteristic
如下:

其中,Ki为电流力增益系数(N/A);i 为线圈电流(A);Bg为气隙磁感应强度(T);Dc为线圈平均直径(m);Nc为线圈绕线匝数。

其中,串联状态:
并联状态:

其中,Di为第 i 组线圈组件的直径;ρ 为线圈组件的电阻率;A 为线圈组件的导线截面积。
结合上式可建立图6 所示的传递函数框图。
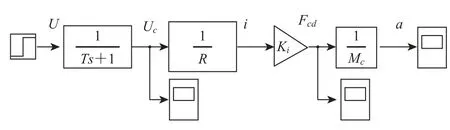
图6 传递函数框图Fig. 6 Transfer function diagram
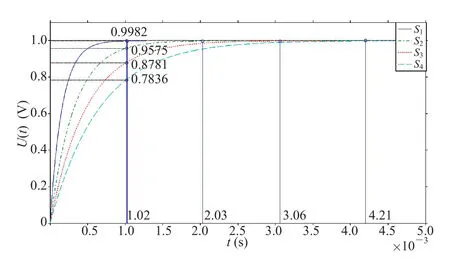
图7 串联线圈组两端电压变化曲线Fig. 7 Curves of voltage withcoils in series
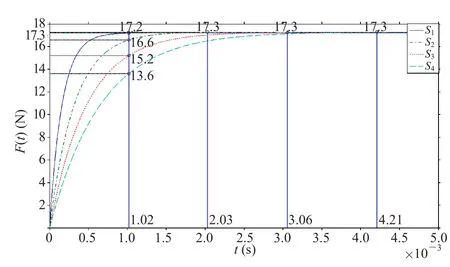
图8 串联线圈组电磁力变化曲线Fig.8 Curves of electromagnetic force with coils in series
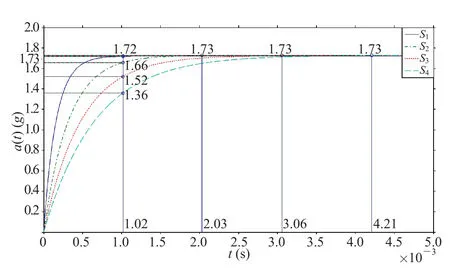
图9 串联线圈组加速度变化曲线Fig. 9 Curves of acceleration with coils in series
对四种串联结构的线圈组的两端,分别加载电压 U=1 V,通过 MATLAB 仿真,分别得到各自线圈组特性曲线。图7 为四种串联结构的串联线圈组两端电压随时间变化曲线,设 tr为响应达到最值时刻的时间:tr1=1.02 ms,tr2=2.03 ms,tr3=3.06 ms,tr4=4.21 ms。其中,S1的响应速度最快,S4的响应速度最慢,但最后都到达同一稳定状态并保持不变。
图8 为四种串联结构的串联线圈组安培力随时间变化曲线。由图可知,四种串联结构的串联线圈组安培力 F(t)响应具有不同的速度变化。其中,在 tr1=1.02 ms 时,F1=17.2 N、F2=16.6 N、F3=15.2 N、F4=13.6 N。可见,S1的响应速度最快,而 S4的响应速度最慢,但最终四种串联结构都基本达到 17.3 N 的最值。
图9 为四种结构的串联线圈组加速度 a(t)响应随时间变化曲线。由图可知,S1的响应速度最快,其加速度值能达到 1.72 g(1.02 ms);S4的响应速度最慢,其最后到达稳定状态并保持在 1.73 g 左右(3.06 ms)。其中,当 tr1=1.02 ms 时,a1=1.72 g、a2=1.66 g、a3=1.52 g、a4=1.36 g,与图8 的分析结果吻合。
同理,分别得到各自并联线圈组的特性曲线。图10 为四种结构的并联线圈组两端电压U(t)随时间变化曲线图。在允许的误差范围内(小于 0.2×10-3s),四种不同并联结构的并联线圈组两端电压随响应时间变化曲线拟合,其上升时间 tr与单组线圈响应时间曲线基本一致。
如图11 所示,四种不同并联结构的并联线圈组安培力 F(t)的达到稳定状态的时间基本一致(tr=1.02 ms),但各自稳定状态时的稳态值不同:F1=17.2 N、F2=69.1 N、F3=155.2 N、F4= 276.4 N。
从图12 可以看出,四种不同并联结构的并联线圈组的加速度 a(t)到达稳定状态的时间相同(tr=1.02 ms),但达到稳定状态的稳态值不同:a1=1.72 g、a2=6.91 g、a3=15.52 g、a4=27.64 g。其中,a1和 a4与图11 的分析结果完全吻合。
四种串联结构和四种并联结构的主要参数对比如表1 所示。从表可知,串联均匀分割的线圈组件由 1 组到4组(S1~S4),其时间常数从 1.6 ms增加到 6.6 ms,其载流响应时间由 1.02 ms 提升到 4.21 ms,增加了 3 倍多;并联均匀分割的 1 组增到4组(P1~P4),线圈加载响应速度与单圈线圈组件加载响应速度基本一致,在约 1.02 ms 达到最大值,其电磁力最值由 17.2 N 增大到 276.4 N,约达原来的 16 倍。同理,其加速度也达到原来的16 倍。
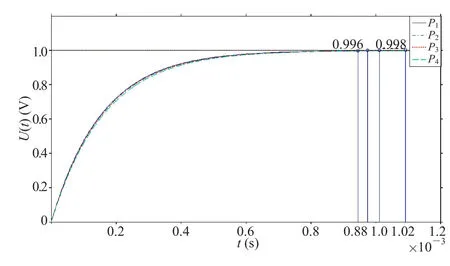
图10 并联线圈组两端电压变化曲线Fig. 10 Curves of voltage with coils in parallel
图11 并联线圈组安培力变化曲线Fig. 11 Curves of electromagnetic force with coils in parallel
图12 并联线圈组加速度变化曲线Fig. 12 Curves of accelerationwith coils in parallel
5 结 论
在响应时间不变的情况下,串联环境下均匀分割的线圈组件由串联 1 组到4组串联,其载流响应时间增大到了约 3 倍;并联环境下,线圈组件线圈组并联组件数增到4组,总电阻减少,电阻线圈长度增加,电流增大,在其线圈加载响应速度与单圈线圈组件加载响应速度基本一致的情况下,理论上其电磁力增大到原来的 16 倍,加速度达到 27.64 g,能够实现高响应特性和大推力控制效果。
表1 主要参数对比表Table 1 Key parameters comparison
[1] 田中裕久. 比例電磁ソレノイドのあゆみ [J].フルイドパワーシステム: 日本油空圧学会誌: Journal of the Japan Hydraulics &Pneumatics Society, 2000, 31(3): 200-207.
[2] Chen G,Lin Q,Wang L,et al. Development and application of a high-thrust voice coil motor [J]. Advanced Materials Research,2013, 718-720:1677-1681.
[3] Zhao S,Tan KK.Adaptive feedforward compensation of force ripples in linear motors [J].Control Engineering Practice,2005,13(9): 1081-1092.
[4] Yajima H,Wakiwaka H,Minegishi K,et al. Design of linear DC motor for high-speed positioning [J].Sensors and Actuators A:Physical, 2000,81(1-3):281-284.
[5] Murrenhoff H, 吴根茂. 液压控制技术发展趋势——第 1 部分元件与传动装置 [J]. 工程设计,1997(3):20-29.
[6] Lindler JE,Anderson EH. Piezoelectric direct drive servovalve [C] // Smart Structures and Materials 2002:Industrial and Commercial Applications of Smart Structures Technologies,2009:46-53.
[7] 李其朋, 方平, 丁凡. 新型双向比例电-机械转换器的研制 [J]. 液压与气动, 2005(12): 62-63.
[8] 张弓, 于兰英, 柯坚. 高频动圈式电-机械转换器[J]. 电机与控制学报, 2007, 11(3): 298-302.
[9] 秦剑, 于兰英, 王国志, 等. 超高速比例电磁铁控制技术的研究 [J]. 机床与液压, 2003(2): 30-32.
[10] Wu S,Jiao Z,Yan L,et al.Development of a directdrive servo valve with high-frequency voice coil motor and advanced digital control [J].IEEEASME Transactions on Mechatronics,2014,19(3):932-942.
The Characteristics Study of an Electro-Mechanical Converter Based on Coil Segmentation Technology
LUO Liangwei1,2ZHANG Gong1,3LIANG Jimin1PENG Zhongkai1,2CHEN Xianshuai1
1( Guangzhou Institute of Advanced Technology, Chinese Academy of Science, Guangzhou 511458, China )
2( School of Electromechanical Engineering, Guangdong University of Technology, Guangzhou 510006, China )
3( Shenzhen Institute of Advanced Technology, Shenzhen 518055, China )
Since time constant and currents could be affected by inductance and resistance after coil combined transformation, a method of coils segmentation and transformation was used for the current-carrying coils. The response time of voltage loading, the output electromagnetic force and the acceleration of an electromechanical converter (EMC) were studied, respectively. Compared with single coils in series, the frequency of EMC with multiple coils in parallel could be about 500 Hz, both the length of coils and current are increased,the peak of output electromagnetic force of EMC is 276.4 N, which is over 16 times larger than that of single coils in series, and the acceleration is up to 27.64 g. Analysis results show that the proposed methods display the characteristics of high response and large thrust force.
electro-mechanical converter; coil segmentation; characteristics
TM 331
A
2015-08-18
2015-09-28
国家自然科学基金(51307170);深圳市基础研究(JCYJ20140901003939032);广州市科学研究(201505051734437)
罗良维,硕士研究生,研究方向为新型电机设计与分析;张弓(通讯作者),副研究员,研究方向为机电液混合驱动技术,E-mail:gong.zhang@giat.ac.cn;梁济民,研究实习员,研究方向为控制理论与应用;彭忠凯,硕士研究生,研究方向为机电系统设计与分析;陈贤帅,副研究员,研究方向为精密设计与分析。
